基于工況的PHEV模糊自適應控制策略研究
2017-04-26 01:12:46陳慧茹郭建華初亮
汽車技術 2017年4期
陳慧茹郭建華初亮
(1.長春市機動車排氣汚染管理中心,長春 130022;2.吉林大學 汽車仿真與控制國家重點實驗室,長春 130022)
基于工況的PHEV模糊自適應控制策略研究
陳慧茹1郭建華2初亮2
(1.長春市機動車排氣汚染管理中心,長春 130022;2.吉林大學 汽車仿真與控制國家重點實驗室,長春 130022)
基于智能交通系統(ITS),提出了基于工況的PHEV模糊自適應控制策略。通過ITS獲取未來路徑的速度特征進行模糊智能控制,基于工況的模糊自適應控制策略通過合理分配電池電量來提高PHEV的經濟性。利用是imulink和Cruise搭建了系統仿真模型,對仿真油耗結果進行了對比分析。結果表明,基于工況的模糊自適應控制策略能夠根據行駛工況的特征參數合理分配電池電量,從而提高了PHEV的經濟性能。
1 前言
目前,插電式混合動力汽車(Plug-in Hybrid Elec?tric Vehicle,PHEV)的能量管理策略大多基于規則的控制策略[1~3],PHEV驅動模式分為電量消耗階段(Charge Depleting,CD)和電量維持階段(Charge Sustain?ing,CS)。基于規則的控制策略具有很強的魯棒性和良好的實時性能,易于實現。然而,這種控制策略對行駛工況的適應性較差,當PHEV在CS模式下驅動時,需要啟動發動機并且其工作在低效區域中,導致油耗增加。為解決此問題,Eason和Noble[4]開發了一種基于動態規劃(DP)的混合動力客車控制策略,并建立了神經網絡模型來預測未來的行駛速度,仿真結果表明,該策略可以提高混合動力客車7%的燃油經濟性,但該算法較復雜,并且必須已知行駛工況。
本文基于智能交通系統(Intelligent Traffic System, ITS),提出了基于工況的PHEV模糊自適應控制策略,借助ITS獲取未來行駛路徑的速度分布,根據行駛工況信息,通過合理分配電池電量來提高PHEV的燃油經濟性。
2 PHEV構型
本文研究的PHEV構型為同軸并聯式,如圖1所示。電機安裝在機械式變速器(AMT)與離合器之間。發動機、電機和機械式變速器由電控單元(ECU)進行協調控制。其動力傳動系統基本參數如表1所列。
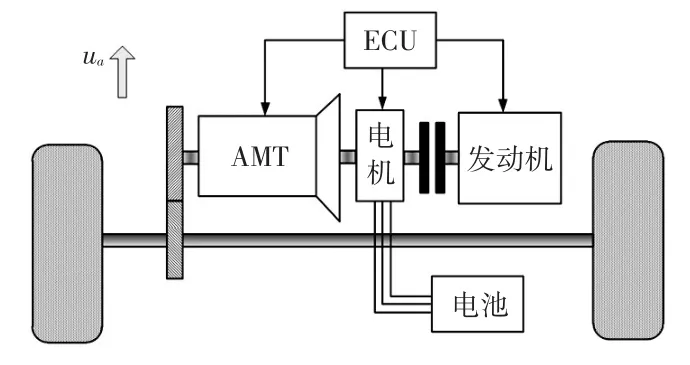
圖1 PHEV構型
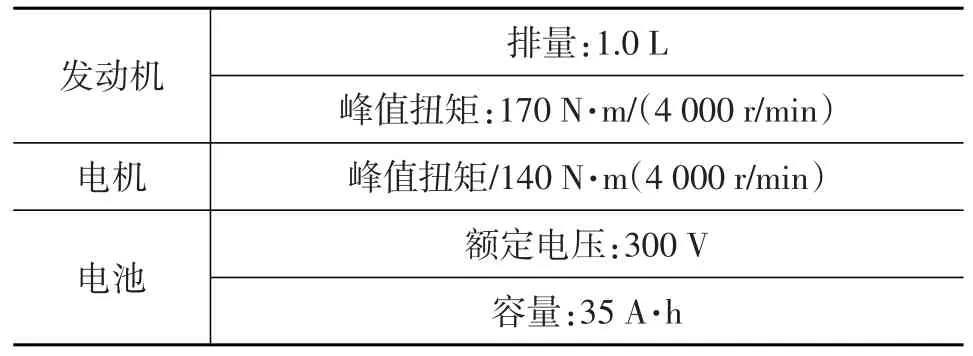
表1 PHEV動力傳動系統基本參數
3 基于工況的模糊自適應控制策略
3.1 控制策略架構
本文提出的基于工況的模糊自適應控制策略架構如圖2所示。
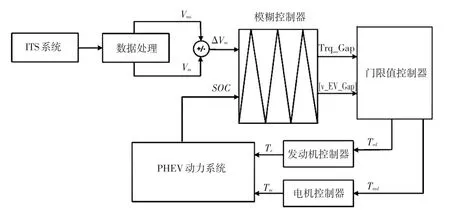
圖2 控制策略架構
該控制策略的控制原理如下:
玉米種子、燕麥種子和光葉紫花苕種子價格分別為15.0,2.0和2.0元/kg。肥料支出包括基肥和追肥的費用。青貯玉米收獲后加工調制青貯料,成本價為0.186元/kg;混播牧草收獲后晾曬制成青干草,成本為1.25元/kg(表2)。
a.首先,駕駛員通過GPS輸入目的地,GPS計算行駛路徑,并將路徑的數據發送到ITS(圖3a)。ITS的實時交通系統監測各路段交通速度(圖3b),然后將速度信息發送到數據處理器(圖2)。
另一種情況下,當ΔVmi的隸屬度函數為dV1并且SOC的隸屬度函數為S5時,需求功率中的電機功率的比例增加,而且發動機幾乎不參與車輛的驅動。在這種情況下,由于速度較低,發動機的工作點遠離高效區域。
該軟件的部分功能涉及學生隱私,在當前大學生對學生管理工作高度敏感的時代,需要給予他們一定的空間。比如定位功能的使用,學生比較在意行蹤的隱私性保護。因此,此功能若無限無度使用易造成學生的排斥心理。
b.數據處理器計算每個區間的平均速度Vmi和整個路徑的平均速度Vm,得到平均速度差ΔVmi=Vmi-Vm。
c.將平均速度差ΔVmi和當前SOC作為模糊控制器的輸入,基于文中所述的模糊規則計算電機轉矩閾值“[Trq_Gap]”和電機驅動速度閾值“[v_EV_Gap]”。
d.根據“[Trq_Gap]”和“[v_EV_Gap]”,基于規則的控制器(圖2)調節PHEV的驅動模式,計算發動機轉矩Te和電機轉矩Tm。
預制光纜余長主要來自于雙端預制光纜,對于單端預制光纜,冗余較長光纜可進行現場裁剪,無需考慮收納空間。預制光纜可分為分散配線方式和預制艙內集中配線方式。
由上述分析可知,根據ITS的實時交通數據,基于工況的模糊自適應控制策略能夠通過智能地分配發動機功率和電機功率達到合理地規劃使用電池功率。
在實驗課上,教師也可適時提出問題,激發學生探求欲.比如,在講解“鹽類水解”相關知識時,筆者要求:現有滴管、試管、CH3COONa、Na2CO3、CH3COOH、石蕊試液,試對醋酸進行酸性驗證,并對碳酸、鹽酸、醋酸的酸性強度進行比較.大多數學生都能夠解決驗證問題,但無法想出合適方案判斷酸性強度.而在筆者提示當CH3COONa與石蕊試液相溶后會變藍后,學生似乎尋找到了路徑,都躍躍欲試.

圖3 實時交通系統和平均速度數據
3.2 模糊自適應控制器
貴州墨:觀賞石界稱為盤江黑珍珠,主要產于興義、羅甸一帶的南北盤江、紅水河流域;石質多為水沖深色石灰巖,系觀賞石中的珍品;興義被中國觀賞石協會評為觀賞石之鄉。由于長年無序開采,儲量已近枯竭。
模糊控制是一種通過模仿人的思維方式實現智能控制的一種控制方法[5,6],非常適合于PHEV/HEV能量管理的非線性問題[7~9]。為了達到更好的實時性和魯棒性,本文利用MATLAB的模糊邏輯工具箱來建立模糊自適應控制器。
轉矩分配模塊計算發動機轉矩Te和電機轉矩Tm。在聯合驅動模式下,計算式為:
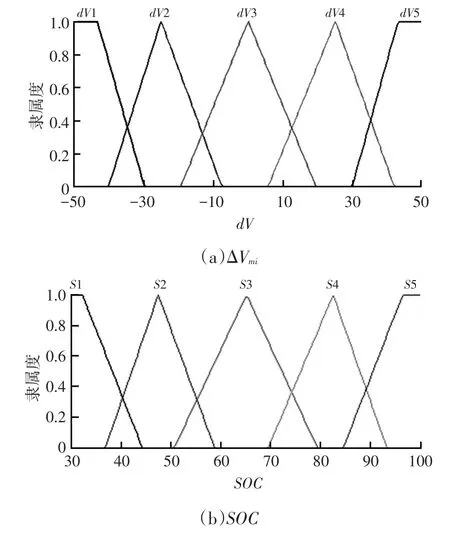
圖4 輸入變量隸屬度函數
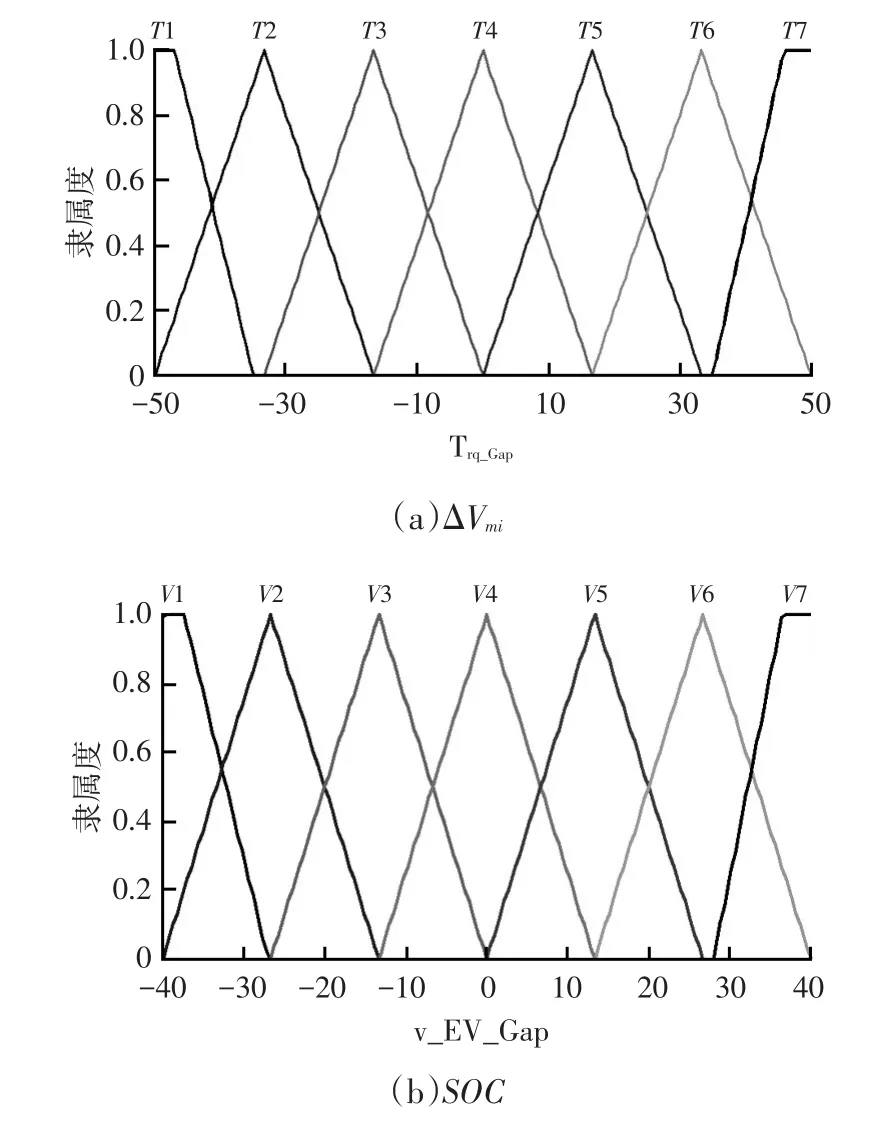
圖5 輸出變量隸屬度函數
基于規則的輸出參數利用隸屬度函數由一組25個規則進行定義,如表2和表3所示。

表2 基于規則的[Trq_Gap]
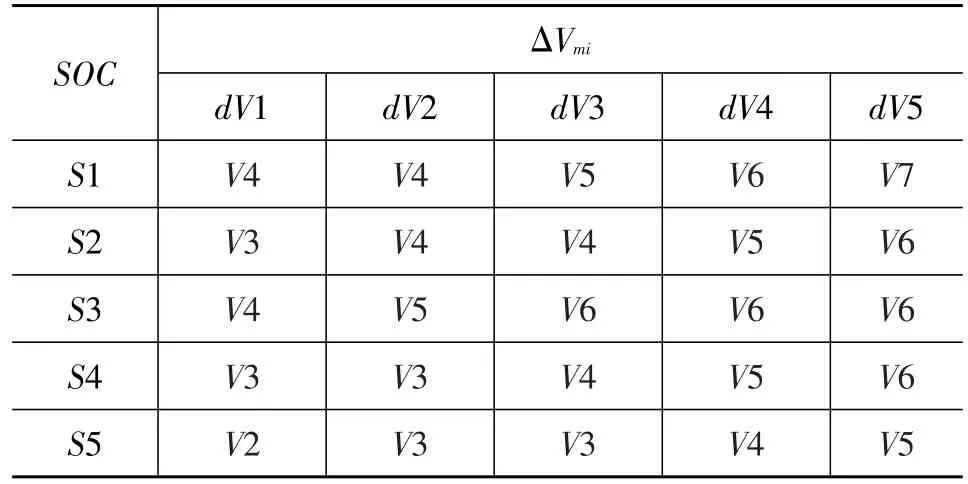
表3 基于規則的[v_EV_Gap]
例如,考慮這樣一種情況:ΔVmi的隸屬度函數是dV5,SOC的隸屬度函數是S1,這意味著當前車速高并且SOC非常低。“[Trq_Gap]”的輸出為T2,表示電機的輸出轉矩小,“[v_EV_GAP]”的輸出是V7,這意味著純電動模式(僅電機驅動車輛)的概率較低。此情況減少了驅動需求功率中的電機功率的比例,并增加了發動機輸出功率的比例,由于車速較高,發動機的工作點接近高效率區域。
1.1 材料與試劑 人結腸癌細胞系SW1116購自美國細胞培養收藏中心。miRNA-1254模擬體以及對應的陰性對照由上海吉瑪生物技術有限公司合成,序列見下表1。
My favorite season is winter.It is in December,January and February.In winter,the days are shorter while the nights are longer.
這些規則的基本原理是盡可能使發動機在接近最佳操作點處運行,同時使用電機來輔助驅動或發電。
3.1.4 加樣回收率 精密稱取注射用硫酸核糖霉素樣品(批號13170416,硫酸鹽含量24.3%),用水溶解并稀釋成含硫酸核糖霉素4 mg·mL-1的供試品儲備液。取“2.4.1”項下硫酸滴定液,加水稀釋至1mg·mL-1作為對照品儲備液。取供試品儲備液1 mL至20 mL量瓶中,平行配制9份,每3份加入對照品儲備液 0.8、1.0、1.2 mL,加水定容。按“2.1”項下方法進行檢測,結果顯示,高、中、低濃度回收率在99.9%~101.9%,均值為 101.1%,RSD 為 1.6%(n=9)。方法準確性較好,結果見表1。
3.3 門限值控制器
由式(2)和式(3)可知,閾值[Trq_Gap]的增加可以使電機轉矩增加和發動機轉矩減小。
在開學典禮上,一位教師代表的發言吸引了我的注意力。我從來沒有聽過這般清脆悅耳的聲音,言語間文學味濃厚,更讓我佩服的是,這位老師沒有帶講稿,即興發言都說得那般自然流暢,文采動人。如果閉著眼睛去聽,還能感受到那種韻律感和節奏感。
PT模式識別模塊是通過車輛的狀態變量(當前車速,SOC和加速器/制動踏板的角度等)來識別PHEV驅動模式[3]。圖6為驅動子模式第一層判別條件,該層次包含純電驅動(Motor_Drive)和發動機驅動(Engine_On)兩個狀態。控制門限為純電動最高速度([v_EV_Max]= 60 km/h)、“[v_EV_Gap]”和SOC。當“[v_EV_Gap]”閾值減小時,更傾向于選擇“發動機驅動”模式,使用發動機功率所占比例增加。
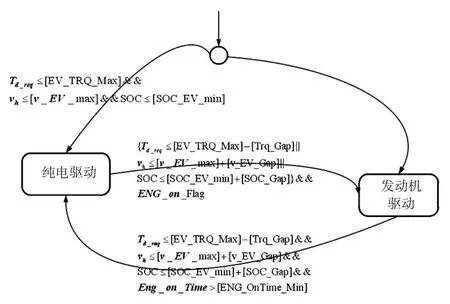
圖6 驅動模式判別條件
模糊控制器具有兩個輸入(ΔVmi和SOC)和兩個輸出([Trq_Gap]和[v_EV_Gap]),每一個變量中可以由變化域的數學隸屬函數(梯形、三角或高斯函數)來表示。為了降低其復雜性,在該控制器中采用三角形和梯形函數,如圖4和圖5所示。如,表示平均速度差ΔVmi的不同可能狀態是{dV1,dV2,dV3,dV4,dV5},其意義為:dV1為“負大”,dV2為“負小”,dV3為“中”,dV4為“高小”,dV5為“高大”。輸入變量ΔVm的變化域為[-50,50](圖4)。

式中,Treq為駕駛員需求轉矩;Te_opt為發動機轉矩上限閥值。
利用Matlab/Simulink建立了基于規則的門限值控制器[8]。該控制器包括“輸入信號模塊”、“輸出信號模塊”、“駕駛需求計算模塊”,“PT模式識別模塊”和“轉矩分配模塊”等子模塊。
4 仿真驗證
為了驗證所提出策略的有效性,利用Matlab/Simu?link和AVL Cruise建立聯合仿真模型。圖7為Cruise整車模型,該模型通過“Cruise interface”模塊與Matlab/Simulink門限值控制器進行通信并進行聯合仿真。選擇WLTC循環工況作為驗證工況[10],如圖8所示。其行駛距離為39.1 km,全程平均速度Vm為26.8 km/h,運行時間為5 245 s,各工況段平均速度Vmi如圖8所示。
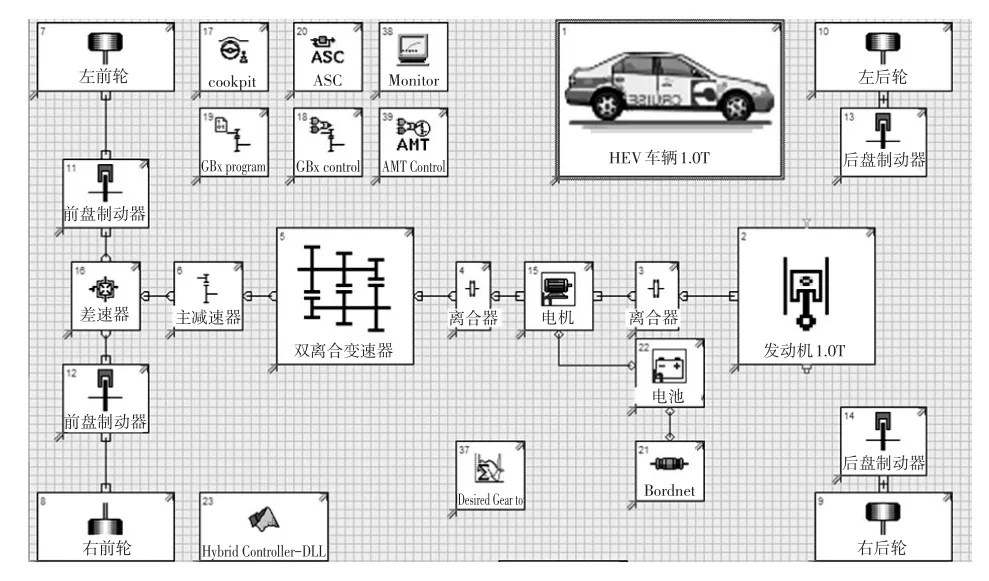
圖7 Cruise整車模型
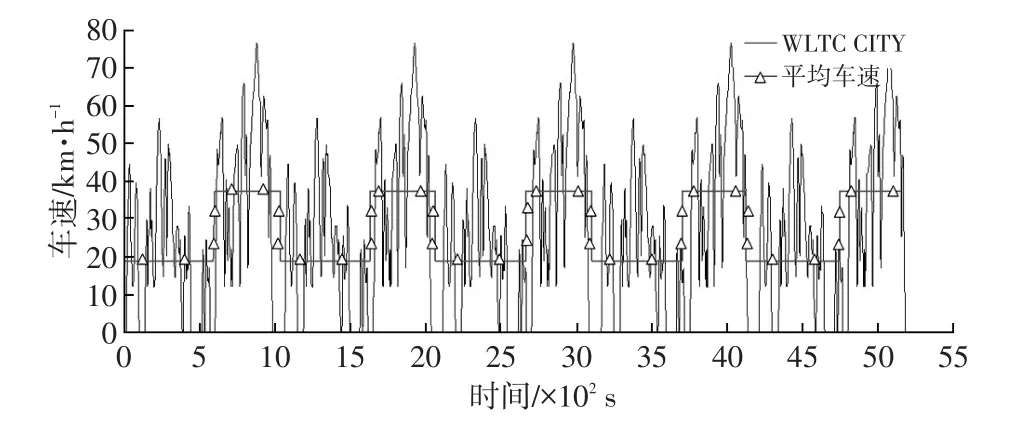
圖8 WLTC循環工況和平均車速
為了對比驗證,選擇了在CD階段是純電模式的全電行程策略(All Electric-Range,AER)和有固定門限值的混合控制策略(Blended)進行對比分析。3種策略的燃油經濟性仿真結果如圖9所示,其中“Fuzzy”為本文所建立的模糊自適應控制策略。由圖9可看出,Fuzzy控制策略的燃料消耗量最低,與AER策略和Blended策略相比分別下降了6.8%和24.2%。
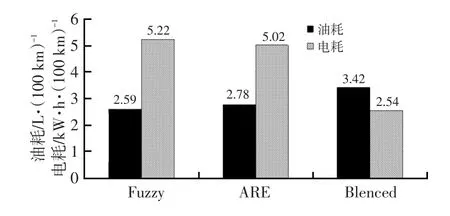
圖9 燃油經濟性仿真結果
圖10為SOC-時間歷程,3種仿真結果如下:
a.在行程結束時,基于工況的模糊自適應控制策略恰好達到CD模式的低限制(35%)。
b.AER策略的SOC值在4 000 s時降至CD模式的最低值(35%),此后PHEV工作在CS模式,需要發動機驅動車輛同時給電池充電(圖11)。圖12是發動機效率比較,結果表明,模糊自適應控制策略的整體效率高于AER策略,這表明模糊自適應控制策略可以提高發動機效率。
c.混合控制策略在行程結束時,其SOC下降到47%,這意味著仍有12%的SOC未被消耗,導致了油耗的增加。

圖10SOC-時間歷程
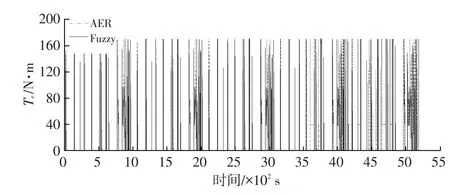
圖11 發動機轉矩時間歷程
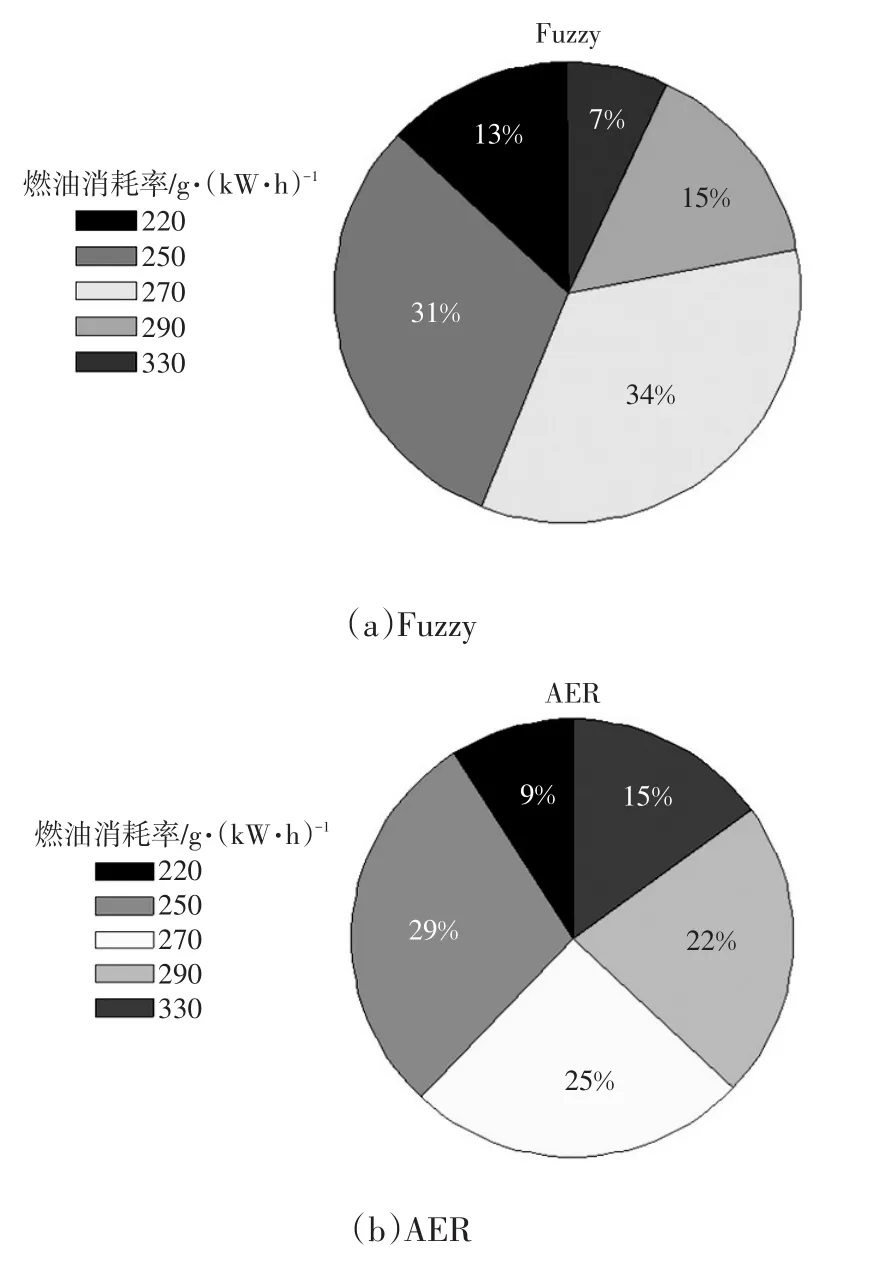
圖12 不同控制策略下發動機效率對比
上述分析表明,本文所建立的模糊自適應控制策略可以提高PHEV的經濟性。
5 結束語
本文基于智能交通系統(ITS),提出了基于工況的PHEV模糊自適應控制策略,設計了該策略的基本控制框架,并研究了關鍵的技術問題。通過ITS獲得未來路徑的各段平均速度,該策略可以通過合理規劃使用電池電量來提高PHEV系統的效率。最后通過Simulink和Cruise搭建了聯合仿真模型,進行了不同控制策略的燃油經濟性對比分析,結果表明,模糊自適應策略能夠使PHEV適應行駛工況特性,合理規劃SOC,從而提高PHEV的經濟性。
1 Jeffrey Gonder,Tony Markel.Energy Management Strategies for Plug-in Hybrid Electric Vehicle,Advanced Hybrid Ve?hicle Powertrains.Michigan,SAE.2007-01-0290,April 2007.
2 Phillip B Sharer,Aymeric Rousseau,Dominik Karbowski,et al.Plug-in Hybrid Electric Vehicle Control Strategy:Com?parison between EV and Charge-Depleting Options,Ar?gonne National Laboratory,SAE.08PFL-554,April 2008.
3 Namwook Kim,Aymeric Rousseau.Comparison between Rule-Based and Instantaneous Optimization for a Single–Mode,Power-Split HEV,Argonne National Laboratory, SAE.2011-01-0873,January 2011.
4 Scott J Moura,Hosam K Fathy,Duncan S Callaway,et al.A stochastic optimal control approach for power management in plug-in hybrid electric vehicles,2008 ASME Dynamic Systems and Control Conference.Michigan, USA, DSCC2008-2252,October 2008.
5 MA Xianghua,YE Yinzhong.Study on genrtic-fuzzy control strategy for PHEV Drive system,Proceeding of the 32ndchi?nese congtrol conference.Xi’an,China,pp.7575-7579,Ju?ly 2013.
6 Wu Jian.Fuzzy Control Strategy of Parallel HEV Based on Driving Cycle Recognition,2012 IEEE 7th International Power Electronics and Motion Control Conference.Harbin, China,pp.2636-2639,June 2012.
7 A Neffati,S caux,M adel.Double Fuzzy Logic Decision in HEV Engergy Management,EVS27 International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium.Barcelo?na,Spain,pp.1-5,November 2013.
8 Yacine Gaoua,Stéphane Caux,Pierre Lopez.Energy Man?agement Using Fuzzy Logic,on HEV,EVS27 International Battery,Hybrid and Fuel Cell Electric Vehicle Symposium.Barcelona,Spain,pp.1-5,November 2013.
9 周能輝,趙春明,辛明華,等.插電式混合動力轎車整車控制策略的研究.汽車工程,2013,35(2):99~104.
10 聶彥鑫,張永生,康征,等.插電式混合動力汽車工況能耗及排放特性研究.汽車技術,2013(10):8~13.
(責任編輯 文 楫)
修改稿收到日期為2017年1月4日。
Research on Route-Based Fuzzy Adaptive Control Strategy of PHEV
Chen Huiru1,Guo Jianhua2,Chuliang2
(1.Changchun Vehicle Exhaust Pollution Management Center,Changchun,130022;2.State Key Laboratory of Automotive Simulation&Control,Changchun,130022)
The Route-based Fuzzy Adaptive Control Strategy(RFACS)of PHEV is presented in this research based on the Intelligent Transportation System(ITS).We used ITS to get the speed characteristic of the future path for fuzzy intelligent control,the RFACS can improve the economy of PHEV system by the rational distribution and use of battery power.The system simulation model was established by Simulink and Cruise,and the results of simulated fuel consumption were compared and analyzed.The simulation results showed that the RFACS strategy can distribute battery power rationally according to characteristic parameters of driving route,thus improve the economic performance of PHEV.
PHEV,ITS,Fuzzy adaptive control
插電式混合動力轎車 智能交通系統 模糊自適應控制
U461
A
1000-3703(2017)04-0040-05
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
數學大世界(2018年1期)2018-04-12 05:39:14
通信電源技術(2016年1期)2016-04-16 04:57:26
汽車與新動力(2015年1期)2015-02-27 12:11:01
時代英語·高三(2014年5期)2014-08-26 02:49:51
