基于opencv的雙目視覺(jué)影像測(cè)量標(biāo)定方法優(yōu)化設(shè)計(jì)
2017-04-26 14:01:10吳世迪石成江何萬(wàn)濤
科技創(chuàng)新與應(yīng)用 2017年10期
吳世迪++石成江++何萬(wàn)濤
摘 要:逆向工程技術(shù)采用了通過(guò)測(cè)量實(shí)際物體的尺寸轉(zhuǎn)換為3D模型的方法。文章著眼于長(zhǎng)距離廣角度下相對(duì)低精度的視覺(jué)影像測(cè)量標(biāo)定,對(duì)此進(jìn)行了優(yōu)化設(shè)計(jì)。通過(guò)CCD攝像機(jī)獲得平面圖像后使用opencv濾波處理,精確識(shí)別測(cè)量物外觀輪廓和激光點(diǎn),綜合激光角度和光斑到像平面的距離求解相機(jī)在世界坐標(biāo)系下的參數(shù)矩陣。
關(guān)鍵詞:結(jié)構(gòu)光測(cè)量;相機(jī)標(biāo)定;opencv濾波;輪廓提取
1 緒論結(jié)構(gòu)光測(cè)量原理及相機(jī)標(biāo)定簡(jiǎn)介
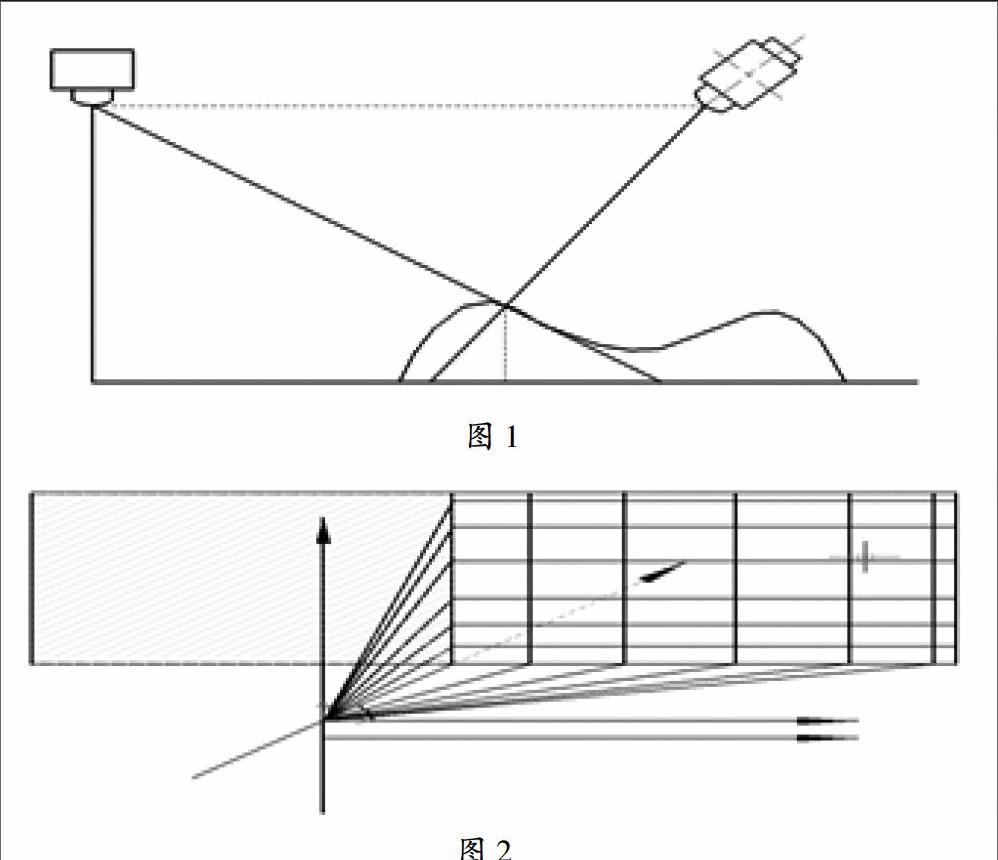
光柵投影儀CCD相機(jī)安裝位置如圖1所示。從光柵投影儀發(fā)出的光柵投射到零坐標(biāo)平面上經(jīng)過(guò)物體表面輪廓阻擋產(chǎn)生包含高度信息的相位偏移信息的反射光,由CCD相機(jī)獲取分時(shí)多幀圖像識(shí)別分析后得到像點(diǎn)實(shí)際高度。
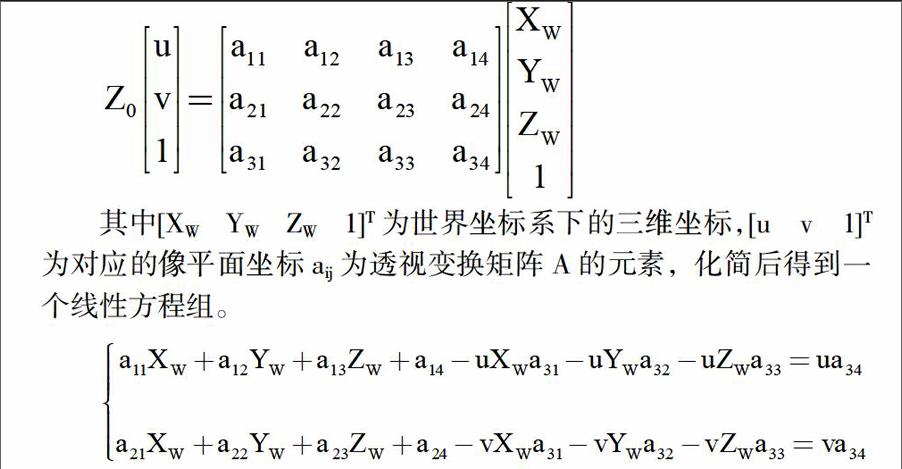
作為描述被測(cè)物體空間位置的絕對(duì)坐標(biāo)系被稱為世界坐標(biāo)系,用來(lái)描述攝像機(jī)像素平面成像的2D位置關(guān)系的平面坐標(biāo)系稱為攝像機(jī)坐標(biāo)系。攝像機(jī)坐標(biāo)系與世界坐標(biāo)系的相對(duì)位置關(guān)系可以用一個(gè)旋轉(zhuǎn)矩陣和一個(gè)平移向量來(lái)描述。由于測(cè)量對(duì)象為較大尺寸和較大視角的情況,所以忽略透鏡的徑向軸向畸變可以得到透視變換矩陣A。
其中[XW YW ZW 1]T為世界坐標(biāo)系下的三維坐標(biāo),[u v 1]T為對(duì)應(yīng)的像平面坐標(biāo)aij為透視變換矩陣A的元素,化簡(jiǎn)后得到一個(gè)線性方程組。
對(duì)于每個(gè)世界坐標(biāo)系下已知其對(duì)應(yīng)關(guān)系的圖像點(diǎn),由上述方程組可知,在不少于六個(gè)對(duì)應(yīng)坐標(biāo)點(diǎn)帶入后可求解矩陣A。較多的對(duì)應(yīng)點(diǎn)帶入后可以得到更多更多的線性約束關(guān)系方程組,用最小二乘法求解矩陣A取值更精確,從而降低誤差影響。基于以上取點(diǎn)需求,引入一種激光測(cè)距配合角度旋轉(zhuǎn)的方式完成相機(jī)標(biāo)定。
2 光斑圖像采集
(1)圖2中坐標(biāo)原點(diǎn)位光源位置,由卡尺和激光測(cè)距度數(shù)配合安裝調(diào)試為零位置。固定在可以水平旋轉(zhuǎn)和豎直垂直于紙面方向旋轉(zhuǎn)的兩個(gè)旋轉(zhuǎn)臺(tái)上。當(dāng)兩個(gè)轉(zhuǎn)臺(tái)安不同角度旋轉(zhuǎn)定位時(shí),就可以分別取到圖示網(wǎng)格狀交點(diǎn)的各個(gè)位置。光源到物體表面距離已知,在兩個(gè)轉(zhuǎn)臺(tái)上的轉(zhuǎn)角已知,可以容易求得物體表面光點(diǎn)位置的三維坐標(biāo)。盡可能多取點(diǎn)保證求值的準(zhǔn)確性。
(2)激光由兩道縱橫交錯(cuò)的線激光組成,隨著兩個(gè)轉(zhuǎn)臺(tái)的轉(zhuǎn)動(dòng),激光點(diǎn)隨之移動(dòng),對(duì)于不同的光點(diǎn)位置分別拍照,獲得每一點(diǎn)相同背景不同光點(diǎn)位置的平面圖像。
3 opencv濾波與輪廓提取
由于高斯噪聲在數(shù)學(xué)上的易處理性,故實(shí)踐中常用這種噪聲模型。在opencv中調(diào)用canny算子的高階用法中,使用高斯濾波降噪,使用canny算子,檢測(cè)出需要的輪廓線條,檢測(cè)線激光十字坐標(biāo)。主要代碼功能流程為:
光標(biāo)圖像采集→創(chuàng)建Mat類載入圖像→將原圖轉(zhuǎn)換為灰度圖像→使用5*5內(nèi)核降噪→調(diào)用canny算子→采集正交十字坐標(biāo)。核心程序如下
Mat dst,edge,gray;dst.create( src1.size(), src1.type() ); cvtColor( src1,gray, COLOR_BGR2GRAY );blur( gray,edge,Size(3,3) );Canny( edge,edge,3,9,3);dst=Scalar::all(0);src1.copyTo(dst,edge);
4 結(jié)束語(yǔ)
Canny算子檢測(cè)后的圖像矩陣中只保留了有用的輪廓信息的像素。遍歷像素矩陣,識(shí)別垂直光標(biāo)點(diǎn)即可獲得像素坐標(biāo)系中的激光點(diǎn)位置坐標(biāo)。對(duì)于低精度要求的大視角對(duì)象整體輪廓識(shí)別可以實(shí)現(xiàn)快速測(cè)量快速標(biāo)定的要求。
參考文獻(xiàn)
[1]胡占義,吳福朝.基于主動(dòng)視覺(jué)攝像機(jī)標(biāo)定方法[J].計(jì)算機(jī)學(xué)報(bào),2002,25(11):1149-1156.
[2]高立志,方勇,林志航.立體視覺(jué)測(cè)量中攝像機(jī)標(biāo)定的新技術(shù)[J].電子學(xué)報(bào),1999,27(2):12-14.
[3]尹文生,羅瑜林,李世其.基于OpenCV的攝像機(jī)標(biāo)定[J].計(jì)算機(jī)工程與設(shè)計(jì),2007,28(1):197-199.
[4]蔡健榮,趙杰文.雙目立體視覺(jué)系統(tǒng)攝像機(jī)標(biāo)定[J].江蘇大學(xué)學(xué)報(bào)(自然科學(xué)版),2006,27(1):6-9.
[5]楊幸芳,黃玉美,高峰,等.用于攝像機(jī)標(biāo)定的棋盤(pán)圖像角點(diǎn)檢測(cè)新算法[J].儀器儀表學(xué)報(bào),2011,32(5):1109-1113.
[6]李鵬,王軍寧.攝像機(jī)標(biāo)定方法綜述[J].山西電子技術(shù),2007(4):77-79.
[7]張廣軍,魏振忠,賀俊吉.結(jié)構(gòu)光三維機(jī)器視覺(jué)系統(tǒng)研究[C].全國(guó)紅外科學(xué)技術(shù)交流會(huì)暨全國(guó)光電技術(shù)學(xué)術(shù)交流會(huì),2001.
[8]毛星云,冷雪飛.OpenCV3編程入門[M].電子工業(yè)出版社,2015.
[9]張少軍,艾矯健,李忠富,等.利用數(shù)字圖像處理技術(shù)測(cè)量幾何尺寸[J].北京科技大學(xué)學(xué)報(bào),2002,24(3):284-287.