力反饋技術及其在教育教學中的應用
2017-04-26 08:49:42劉路苗李偉戴佳佳
數字教育 2017年2期
劉路苗 李偉 戴佳佳
力反饋技術及其在教育教學中的應用
劉路苗 李偉 戴佳佳
(南京師范大學 教育科學學院,江蘇 南京 210000)

力反饋技術的出現提供了一種新型的人機交互體驗,它支持用戶通過力反饋設備感受計算機虛擬環境中的物體運動和力覺信息,是一種新型的教育教學手段。本文在介紹力反饋技術的基本概念、工作原理及主流的力反饋設備以及總結力反饋技術關鍵問題的基礎上,分析和歸納整理了力反饋技術被引入教育領域所取得的成果,得出力反饋技術在教育教學中的應用呈現教育教學層次多樣化、教育教學領域多樣化和教育教學方式多樣化的特點。
力反饋;力反饋技術;力反饋設備;教育教學應用
虛擬現實技術是計算機圖形學、人機接口技術、多媒體技術、網絡技術、傳感技術等的集合,是一門富有挑戰性的交叉技術,被公認為21世紀影響人們生活的重要技術和發展學科。力反饋技術,作為一種重要的人機接口技術,它結合其他虛擬現實技術,使用戶能夠通過視覺、聽覺和觸覺等通道與虛擬環境進行交互,有助于用戶對虛擬環境的熟悉和掌握。將力反饋技術引入到教育教學活動,用戶一方面可以通過圖形窗口觀察教學情境,另一方面可以感受到在使用力反饋設備與教學情境中物體交互時產生的力反饋信息。力反饋技術和教學內容相結合,既可以活躍課堂的學習氛圍,又可以激發學生的學習興趣。此外,力反饋技術擴展了用戶的人機交互方式,有助于用戶手眼協調能力的提高,在教育領域應用前景廣闊。經實踐研
究和查閱文獻資料,筆者了解到目前國內關于力反饋技術的研究和應用還處于起步階段,本文對力反饋技術的概念、工作原理、主流設備及應用中的關鍵問題進行分析,對力反饋技術在教育教學領域中的應用進行分類整理,指出其應用特點和不足,以期對后來研究者起到參考和借鑒作用。
一、力反饋技術概述
(一)基本概念
力反饋是指在人機交互過程中,計算機對用戶的輸入做出響應,并通過力反饋設備作用于用戶的過程[1]。它是一種機械裝置表現出來的反作用力,將力反饋設備與環境中物體交互的信息轉化成用戶能夠感知的力的效果[2],如觸碰物體的阻力、舉起物體的重力和“觸摸”物體表面的摩擦力。基于力反饋的具體應用廣泛存在:在擊球訓練的過程中,運動員在虛擬球場通過特殊的力反饋設備,身臨其境地感受“擊球”的力度和震感;在漢字書寫訓練中,用戶借助力反饋設備訓練書寫過程中腕部和手指的運動控制能力和力度控制能力,并通過反復練習強化書寫技能;在虛擬手術訓練中,用戶使用力觸覺設備對虛擬的器官進行手術,根據人手感知到的反饋力控制手術刀的切口和力度,獲得現場做手術時的逼真體驗。相比單純觀看專家動作技能視頻的教學方法,力反饋教學應用不僅提供了一種更具真實感和沉浸性的教學情境,而且其學練結合的模式有助于提高用戶掌握動作技能的效率。
力反饋技術是一種新型的人機交互技術,它允許用戶借助力反饋設備觸碰、操縱計算機生成的虛擬環境中的物體,并感知物體的運動和相應的力反饋信息,實現人機力覺交互[3]。雖然傳統的鼠標、鍵盤、觸摸屏等交互手段可以滿足用戶與環境中物體交互的需求,但是缺乏力覺交互信息的反饋。力反饋技術結合其他的虛擬現實技術,使用戶在交互過程中不僅能夠通過視、聽覺通道獲取信息,還能夠通過觸覺通道感受模擬現實世界力覺交互的“觸感”。因此,力反饋技術的引入,使交互體驗更加自然、真實。
(二)工作原理
在力反饋系統中,用戶一方面可以在圖形窗口看到虛擬環境中的物體或場景,另一方面還可以借助力反饋設備身臨其境地感受操縱物體時的力覺信息。力反饋系統的工作原理如圖1所示。圖中主計算機是整個系統的核心,用于執行程序的運算,處理外部設備輸入,實現圖形和力的同步實時渲染及力覺的輸出;力反饋設備是力反饋技術的關鍵部分,允許用戶操縱虛擬物體以及感受力覺信息;圖像顯示器,用于呈現渲染后的虛擬場景,通過可視化信息幫助用戶設計、感知虛擬環境。力反饋系統的具體實現步驟如下:
第一,初始化。創建虛擬環境中物體的幾何模型,依據其物理特征建立場景中物體柔軟系數和作用力的映射關系;依據力反饋設備的運動空間與計算機中圖形空間的映射關系,設置力反饋設備與虛擬物體的交互機制;初始化圖形窗口和力反饋設備。
第二,信息計算。一方面,應用程序計算場景中的圖形大小、位置和光照等視覺信息,另一方面,應用程序處理場景中物體的反饋力大小和物體材質等觸覺信息。
第三,渲染和顯示。依據計算好的圖形信息,利用計算機在圖形窗口中繪制相應的場景并將力覺信息輸出到力反饋設備,同時用戶感受到來自觸覺設備的反饋力。
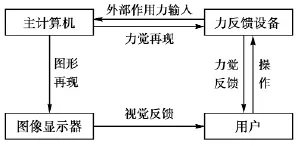
圖1 力反饋技術工作原理
(三)主流的力反饋設備
在虛擬場景中,能夠精確地反饋力/觸覺信息的設備是至關重要的,它們是進行人機力覺交互的接口,它們可以實現識別用戶的動作輸入,并將計算機分析得出的反饋力作用于用戶[4]。雖然力覺交互可以使用人體的許多部位來完成,但是目前只有基于手的力反饋設備較為發展成熟和廣泛使用[5]。Geomagic、Force Dimension、Haption以及Immersion等公司[6]在該方面的研發上做出了貢獻,圖2展示了這類主流的力反饋設備。
美國Geomagic公司的Phantom系列是筆式的力反饋設備[如圖2(a)(b)所示],在醫學、藝術等領域已經得到廣泛的使用;瑞士Force Dimension 公司的Omega系列和Delta系列是采用獨特的Delta結構的力反饋設備[如圖2(c)(d)所示],可在較大工作空間內實現作用力的大范圍傳遞,主要應用于工業、醫療、航空航天、計算機模擬等環境要求苛刻的高端領域;法國Haption 公司的Virtouse 系列是可進行自行管理的力反饋設備[如圖2(e)所示],具有活動范圍廣、可承受的力和扭矩大等優點,多應用于工業裝配、航空維修和生物工程領域;Logitech公司的Force 3D和Microsoft公司的Sidewinder是游戲桿式的力反饋設備[如圖2(f)(g)所示],在游戲領域使用較廣;不同于上述桌面固定式的力反饋設備,美國Immersion 公司的Cyber Grasp 是一種裝配在操作者身體上的手套式力反饋設備[如圖2(h)所示],它可以同時為手和手指提供力反饋,適用于虛擬現實研究、產品設計、動畫、教育等領域。
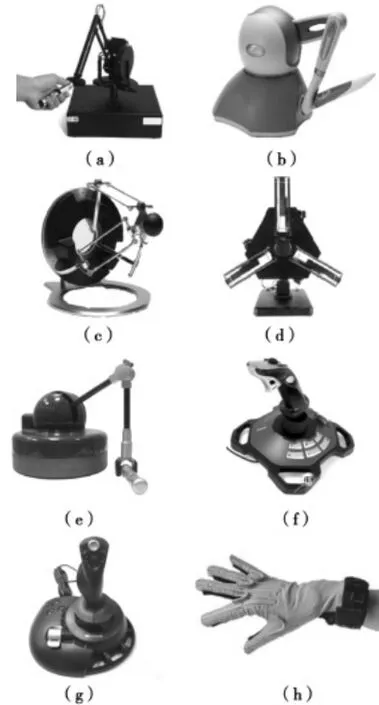
圖2 主流的力反饋設備
(四)關鍵問題
力反饋系統的實現過程中涉及到以下關鍵問題:力反饋計算模型設計、碰撞檢測、視覺與力覺的同步渲染,相應地產生了針對解決上述問題的一系列算法和接口。
1.設計力反饋計算模型
力反饋計算模型用于計算虛擬環境中物體間交互時產生的力,并由力反饋設備傳遞給用戶[7]。目前,力反饋算法主要采用基于物理建模方法的有限元模型和彈簧—質點模型[8],如圖3所示。其中,有限元模型將連續體離散為多個單元,分別對每個單元進行模擬,之后連接各單元模擬整個連續體,最后通過解方程組計算質點的受力;彈簧—質點模型首先將物體質量離散到各個質點,并通過彈簧連接柔性物體離散后的質點,依據胡克定律計算質點之間的力,從而模擬整個物體的受力。有限元模型能夠較好地滿足交互的真實性需求,但是運算量大、求解過程復雜,難以滿足交互的實時性需求;而彈簧—質點模型具有建模過程簡單、計算量較小、交互實時性較好的特點。
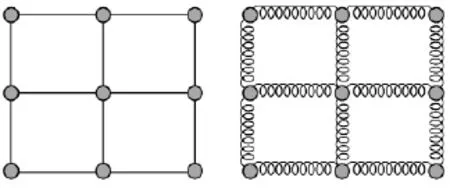
圖3 有限元模型和彈簧—質點模型
2.實現碰撞檢測
碰撞檢測用于實時檢測虛擬環境中物體間的碰撞情況,為之后圖形信息的繪制及力反饋信息的計算奠定基礎。當前的碰撞檢測算法主要采用包圍盒技術[9],首先對物體的包圍盒進行相交檢測(模糊碰撞檢測),當包圍盒相交時其包圍的物體才有可能相交。然后進行物體間的精細碰撞檢測,當包圍盒不相交時,其包圍的物體一定不相交,結束物體間的碰撞檢測[10]。該方法可以避免大量不必要的相交測試,其碰撞檢測過程如圖4所示。
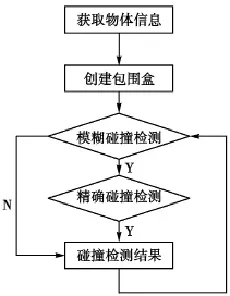
圖4 碰撞檢測流程圖
3.增強力覺真實感
視覺與力覺的同步渲染用于保持較低刷新頻率的視覺信息(30fps~60fps)和較高刷新頻率的力覺信息(1000fps)的一致性。目前,主流的開源力反饋接口OpenHaptics、CHAI3D等都支持視覺與力覺融合的應用開發。其中,OpenHaptics是SenseAble公司針對Phantom系列力反饋設備研發的開發工具包,包括QuickHaptics API、Haptic Device API、Haptic Library API三個不同層次的接口庫,能夠滿足不同用戶的設計需求[11];CHAI3D是由斯坦福大學人工智能實驗室研發的支持多種力反饋設備的開發工具包,它具有較好的可擴展性,允許用戶在已有視覺、力覺渲染算法的基礎上根據自己的需要設計新的渲染算法,也可以通過添加驅動的方法支持新的力反饋設備[12]。
四、力反饋技術在教育教學中的應用
力反饋技術最早應用于軍事領域,主要用于飛行員、宇航員的模擬訓練。隨著計算機技術的發展,游戲廠商開始將這一技術引入電子游戲,普通的PC用戶也能獲得力反饋體驗帶來的樂趣。當前的教育活動主要通過文字、圖形圖像、聲音、視頻等給予學習者視、聽覺信息,忽視了觸覺信息對于培養學習者認知思維的重要性。隨著力反饋技術的發展,將力覺交互引入教育應用成為可能。力覺信息和視覺、聽覺信息相融合,進一步擴大了力反饋技術在教育中的應用。隨著研究的深入,支持力反饋的教育應用分布呈現出教育教學層次多樣化、教育教學領域多樣化和教育教學方式多樣化的特點。
(一)教育教學層次多樣化
1.基礎教育
在學習科學、技術、工程和數學(STEM:Science,Technology,Engineering & Math)課程時,用戶常常會遇到一些復雜抽象的內容。研究表明,針對這些內容的學習,采用從具體到抽象的教學策略,有助于提高用戶的學習效率。在教學過程中,師生先通過一定的教具以實踐操作的形式進行具體事物的學習,再從符號、公式等抽象層次加深知識的理解。針對K-12數學教學,拉維克蘭(Ravikiran) 等人[13]開發了支持力反饋的教具,并將它們應用于負數加法這一抽象概念的學習。負數加法教學過程中涉及的教具有:若干表面標有數字的小球作為加數(每個小球被賦予不同的力,力的大小與小球上數字的絕對值大小成正比,當小球上數字為正數時力的方向向下,負數時力的方向向上),一個加法容器(可放置一個或兩個加數)。用戶在進行加法操作時,首先借助力反饋設備移動加數到加法容器,操作完成后可明顯感受到加法運算前后容器力的變化,即當向加法容器內加入一個正數時,加法容器向上的力相應增加;當向加法容器內加入一個負數時,加法容器向下的力隨之增加。用戶根據加法容器內力的大小和方向的變化情況,可以深入淺出地理解正負數對于相加運算后的和的影響。
2.高等教育
美國斯坦福大學和約翰霍普金斯大學[14]將力反饋技術融入大學生初級動力系統課程,并取得了良好的教學效果。該課程的學習內容分為以下三個方面:①力反饋系統的構建:首先,學生們要熟悉力反饋設備的操作方法和工作原理,并建立力反饋系統模型;其次,依據牛頓定律或其他類似的方法設計力反饋設備位置的運動控制方程,包括慣性、阻尼、摩擦力等參數的設定;最后,假設力反饋設備的運動是線性運動,校準力反饋設備的運動力矩輸出和位置傳感器。②系統響應和反饋控制的設計:學生們通過分析運動控制方程確定系統的極值,之后再通過一個放大回路連接計算機與力反饋設備。此外也可以借助控制軟件調節控制增益和反饋增益確保系統交互的穩定性。③力反饋設備與虛擬環境的交互:學生們通過調整彈性系數和阻尼系數的大小,能夠使力反饋設備模擬彈簧和阻尼器,同時明顯地感知不同效果的摩擦力和阻尼力。此外,上述兩所大學中的約翰霍普金斯大學開設了用于遠程操作和虛擬現實的力反饋系統研究生跨學科課程,該課程采用學生分組的形式進行教學活動。小組成員來自不同專業,包括生物醫學工程、計算機科學、電子工程和機械工程。該課程設立的初衷是鼓勵來自不同專業背景的學生通過團隊協作發揮各自的專長,如生物醫學工程專業的學生能夠具備人類心理物理研究所需的專業醫學背景知識并且能夠為外科手術仿真提供組織模型,計算機科學專業的學生可重點負責實施編程和力反饋渲染,其他專業的學生則完成力反饋機制的設計和實現。該課程的教學成果顯著,課程開展的三年內有大約一半的課程項目論文被相關會議錄用。此外,該課程的部分學生還參加了2006年巴黎支持力覺交互的機器人科學暑校活動,并展示了力反饋系統的基本設計實現過程。
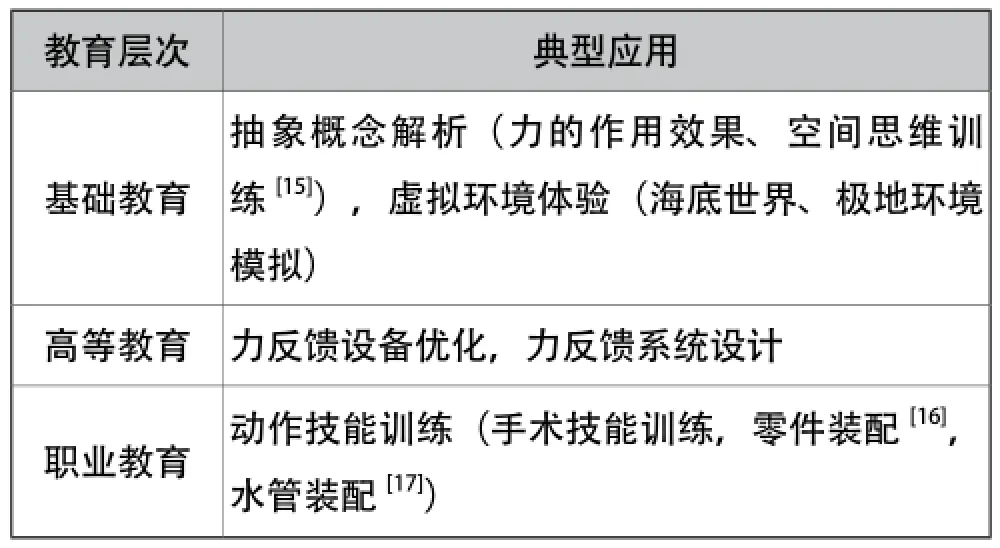
表1 力反饋技術在不同教育層次中的應用
(二)教育教學領域多樣化
1.醫學領域
“望、聞、問、切”四診法是中醫的精髓,其中“切”初指把脈,現在可泛指觸診。觸診是指醫生通過手指觸、摸、按、壓被檢查局部,以了解體表(皮膚及皮下組織等)及臟器(心、肺、肝、脾、腎等)的物理特征:大小、輪廓、硬度、觸痛、移動度及液動感等。它可為醫生檢查部位及臟器是否發生病變提供重要依據,此外其診斷結果的準確性直接取決于醫生手法的熟練程度。塞巴斯蒂安(Sebastia)等人[18]設計實現的觸診教學系統,不僅提供了逼真的生物軟組織模型,而且優化了力反饋計算模型和力反饋設備的操作方式。用戶在練習觸診手法時,一方面能夠在顯示器上看到自己的觸診動作,另一方面能夠借助力反饋設備感受按壓不同檢查部位時力度的變化。該系統是一個可供用戶雙手操作的觸診教學系統,其仿真效果獲得了觸診專家的認可。
2.生物學領域
“分子對接”是分子生命科學教育的核心概念,同時也是用戶在學習過程中備感困惑的抽象概念。分子對接是一種將受體和配體分子通過空間匹配和能量匹配而相互識別形成分子復合物,并預測復合物結構的藥物設計方法。康拉德(Konrad)等人[19]借助力反饋技術構建了分子對接模型,使用戶能夠通過操縱力反饋設備改變分子的位置和方向來尋找理想的對接位置,同時感知分子對接過程中作用力的變化,從而生動、直觀地理解分子對接這一抽象概念。文章中設立兩個實驗組:視觸覺學習組和僅視覺學習組,實驗前后分別對實驗組成員進行分子對接掌握程度測試。文章作者通過對比分析測試結果發現:學習結束后的測試中,視觸覺學習組的測試時間少于僅視覺組,但測試準確率高于僅視覺組。
3.藝術領域
中國有句成語“字如其人”,它在一定程度上反映了一手好書法的重要性。在書法練習過程中,用戶的筆畫順序和書寫力度都會對書寫效果產生影響。較之于以前的硬卡片書寫練習,穆罕默德(Mohamad)[20]的基于力反饋的書法練習系統不僅能使用戶模擬正確的書寫軌跡,還能使用戶在練習過程中及時糾正書寫錯誤,例如用戶在書寫過程中過于偏離預定的軌跡,力反饋設備向用戶施加相應的力引導至預定軌跡。該系統提供了三種學習模式,每種模式下提供不同的力反饋信息,能夠滿足不同用戶的書法練習需求。
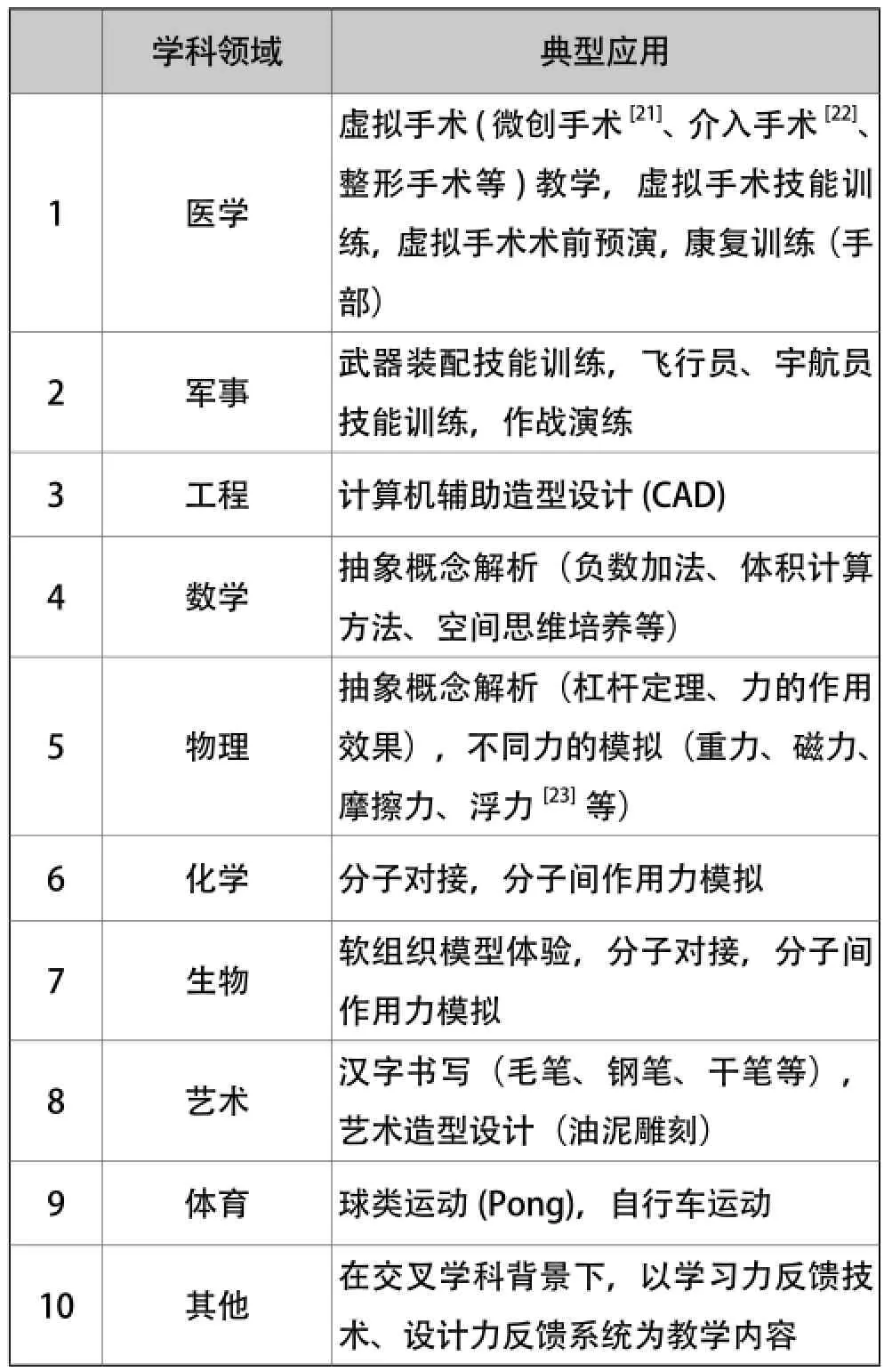
表2 力反饋技術在不同學科領域中的應用
(三)教育教學方式多樣化
1.教學實驗
針對齒輪工作原理的教學,Insook(因斯奧克)等人[24]以互相嚙合的兩個齒輪為例,設計實現了一個視覺、力覺融合的教學實驗。實驗過程中,用戶借助力反饋設備轉動其中一個齒輪并帶動另一齒輪,這時就能感受到兩個齒輪間的咬合力。實驗結果表明,用戶通過對引入力反饋的齒輪嚙合仿真實驗的學習能夠加深齒輪工作原理的理解。閆峰新等人[25]構建了一個集物理、數學、生物、化學現象和仿真為一體的教學內容豐富的實驗平臺,此外該平臺還提供了一系列實驗工具用以輔助用戶的學習活動。文中詳細介紹了向心力的仿真實驗以幫助用戶理解質量、距離和速度對向心力大小的影響。實驗中用戶能夠控制物體的質量、繞行速度、與另一物體的距離,并借助力反饋設備感受向心力的變化。
2.教育游戲
Pong 是一款古老經典且頗受玩家喜愛的彈球游戲,玩家需要在游戲中控制球拍將球擊打出去,并在回接球時盡量不讓球漏空。有相關研究團隊[26]將力反饋技術引入到傳統的Pong 游戲,使用戶不僅能夠借助力反饋設備控制球拍將球擊打回去,還能體驗揮動球拍擊球時產生的力感和震感,增加游戲的趣味性。赫伯特(Herbet)等人[27]設計實現了一款面向成人口腔衛生護理的系統,該系統致力于通過教授正確的刷牙方法達到有效保持口腔衛生的目的。在該系統中用戶既可以看到虛擬場景中的口腔模型和牙刷模型(力反饋設備的圖形顯示),同時也可以感受到操縱力反饋設備刷牙過程中的力(包括大小和方向)。實驗結果表明,該系統能有效提高用戶掌握正確刷牙方法的效率。
3.展覽體驗
力反饋技術在教育領域的另一個重要應用,是公共場所如博物館和展覽館等的虛擬場景再現。在日常的文物展覽館,為了保護文物的完整性,絕大多數展品都設有禁止觸摸的標識,用戶只能通過眼睛觀察文物的特征。使用虛擬現實技術和數字技術再現這些文物,既能允許參觀者觸摸這些文物,又能夠保證文物的安全。展館首先對這些文物進行3D建模,其次在模型表面添加紋理、材質等信息,最后連接力反饋設備,設計實現力反饋設備與場景中物體的互動機制[28]。參觀者只需借助力反饋設備,即可“觸摸”到文物的紋理和材質信息[29]。此外,在諸如珊瑚礁、沙漠等特殊場景中加入力反饋技術,用戶不僅可以身臨其境地觀察場景中的魚、珊瑚、仙人掌等物體,而且可以使用力反饋設備在場景中進行自由探索,同時獲得相應的觸覺信息[30]。使用力反饋技術數字再現的特殊場景融合了視、聽、觸多種感官信息,因而更加真實、自然,有助于激發用戶的探索熱情和學習興趣。
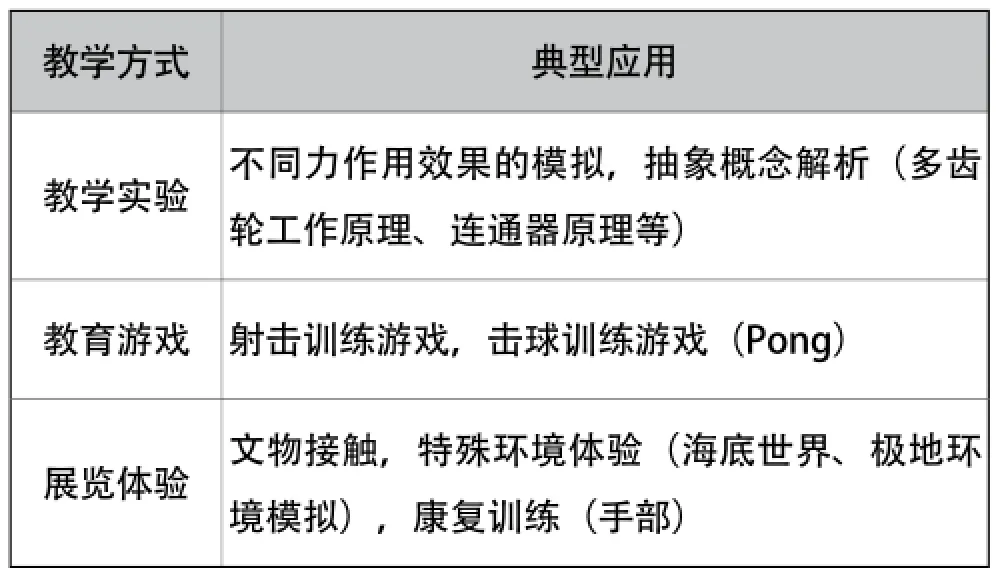
表3 力反饋技術教育應用形式
五、結語
作為虛擬現實技術的關鍵技術之一,力反饋技術實現了人機力覺交互,它結合其他虛擬現實技術提供了一種多感官通道融合的交互方式。與傳統的以視聽交互為主的教育應用相比,力反饋教育應用(其中包括力反饋技術以外的其他虛擬現實技術)不僅能為用戶提供豐富的視聽信息,同時允許用戶通過操縱力反饋設備身臨其境地感知虛擬環境中物體的運動和力覺信息。因此,將力反饋技術引入教育領域,能夠增強學習活動的真實性和沉浸感。筆者通過查閱分析力反饋技術在教育中應用的相關文獻,總結了不同教育層次、教學領域及教學方式下的主要應用,得到力反饋技術在教育中的應用具有教育教學層次多樣化、教育教學領域多樣化和教育教學方式多樣化的特點。雖然與傳統的教學系統相比,使用力反饋技術的教學系統,具有多感官融合、體驗逼真、沉浸感強的優勢,但是,力反饋技術在教育教學的應用過程中仍有一些問題亟需解決。第一,如何選擇合適的教學內容:即如何依據既定的教學目標選擇合適的教學內容,以充分發揮力覺交互在教學活動中的優勢。第二,如何設計組織教學活動:由于教室空間有限和力反饋設備的成本問題,教學活動經常以分組形式進行,如何統籌小組合作和個人學習以確保教學目標的完成。第三,如何評價力反饋對學習效果的影響:教學活動中經常采用實驗對比的方式判斷力反饋是否影響最終的學習效果,但是還沒有形成明確的評價標準,而且多數實驗周期偏長(2—3個學期或學年)。由此可見,力反饋技術本身還不夠成熟,力反饋教育應用尚處于初步發展階段。然而作為一種重要的交互手段,它以其獨特的優勢指明了未來人機交互的發展方向,激發了廣大教育工作者的探索熱情和研究動力。相信在不久的將來,隨著信息技術的發展和研究的深入, 力反饋技術將能夠充分發揮其教育潛力,并且越來越多地應用于教育活動。
[1][3]楊立穎.基于力反饋的機器人遙操作系統研究[D].廣州:華南理工大學,2011.
[2]一居.力反饋技術[J].個人電腦,2003,(8):174-175.
[4][7]陸九如,杭魯濱,黃曉波,等.基于虛擬現實的力反饋交互系統應用技術[J].輕工機械,2016,34(2):98-102.
[5]陸熊,宋愛國.力/觸覺再現設備的研究現狀與應用[J].測控技術,2008,27(8):6-10.
[6]李佳佳,齊元勝,王曉華,等.基于虛擬現實的力反饋設備的研究與應用[J].機械科學與技術,2011,30(7):1107-1111.
[8]儲麗麗.基于有限元分析和質點彈簧模型的軟組織形變仿真研究[D].哈爾濱:哈爾濱工業大學,2014.
[9]馬登武,葉文,李瑛.基于包圍盒的碰撞檢測算法綜述[J].系統仿真學報,2006,18(4):1058-1061.
[10]陳學文,丑武勝,劉靜華,等.基于包圍盒的碰撞檢測算法研究[J].計算機工程與應用,2005,41(5):46-50.
[11]SENSEABLE TECHNOLOGIES.3D Touch? SDK OpenHap- tics? Tookit Programer’s Guide(Version 3.0)[M/CD].Sense-Able Technologies,2008.
[12]CHAI3D.CHAI3D力反饋接口介紹[K/OL].(2013-08-18)[2017-01-10].http://www.chai3d.org/concept/about.
[13]SINGAPOGU R B,BURG T C.Haptic Virtual Manipulatives for Enhancing K-12 Special Education[C]//Southeast Regional Conference,Clemson,South Carolina,March 19-21,2009 New York:ASME,2009:1-4.
[14]GROW D,VERNER L N,OKAMURA A M.Educational Haptics[C].AAAI Spring Symposia-Robots and Robot Venues: Resources for AI Education,2007 San Francisco:AAAI,2007:53-58.
[15]COHEN C A,HEGARTY M.Inferring Cross Sections of 3D Objects:A New Spatial Thinking Test[J].Learning and Individual Differences(S1041-6080),2012,(22):868-874.
[16]Damian Grajewskia,Filip Górskia,Adam Hamrol,et al.Immersive and Haptic Educational Simulations of Assembly Workplace Conditions[J].Procedia Computer Science(S1877-0509),2015,(75):359-368.
[17]JAMES J,UNNIKRISHNAN R,DELMAR M.Haptic Sim- ulations for Training Plumbing Skills[C] IEEE International Symposium on Haptic,Audio and Visual Environments and Games,Richardson,TX,Oct 10-11,2014 New York:IEEE,2014.
[18]UllRICH S.Haptic Palpation for Medical Simulation in Virtual Environments[J].IEEE Transactions on Visualization and Computer Graphics(S1077-2026),2012,(18):617-624.
[19]KNORAD J,BIVALL P,TIBELL A E,et al.Exploring Relationships between Students’ Interaction and Learning with A Haptic Virtual Biomolecular Model[J].Computers & Education (S0360-1315),2011,5(7):2095-2105.
[20]EID M,MANSOUR M,LGLESIASR.A Haptic Multimedia Handwriting Learning System[C]//Proceedings of the Inter- national Workshop on Educational Multimedia and Multime- dia Education,Augsburg,Bavaria,Germany,September 28,2007 New York:ACM,2007:103-108.
[21]PINZON D,BYRNS S,ZHENG Bin.Prevailing Trends in Haptic Feedback Simulation for Minimally Invasive Surgery [J].Surgical Innovation(S1553-3506),2016,23(4):415-421.
[22]CHEN Guan-chun.Virtualreality Simulator System for Double Interventional Cardiac Catheterization Using Haptic Force Producer with Visual Feedback[J].Computers and Elec- trical Engineering(S0045-7906),2016,(53):230-243.
[23]MINOGUE J,BORLAND D.Investigating Students’ Ideas about Buoyancy and the Influence of Haptic Feedback[J].JSci Educ Technol(S1059-0145),2016,(25):187-202.
[24][29]HAN I,BLACK J B.Incorporating Haptic Feedback in Simulation for Learning Physics[J].Computers & Education (S0360-1315),2011,(6):2281-2290.
[25]YAN Feng-xin,HOU Zeng-xuan,ZHANG Ding-hua,et al. Research of Haptic Techniques for Computer-Based Educa-tion[C]//4thInternational Conference on Computer Science & Education,Nanjing,July 25-28,2009 New York:IEEE,2009:1636-1640.
[26]KESSLER J,LOVELACE R C,OKAMURA A M.A Haptic System for Educational Games:Design and Application-Specific Kinematic optimization[C]//Asme Dynamic Systems & Control Con-ference,Palo Alto,California,USA,October 21-23,2013 New York:ASME,2013,23(1):80-88.
[27]RODRIGUES H F,MACHADO L S,VALENCA A G. Applying Haptic Systems in Serious Games:A Game for Adult’s Oral Hygiene Education[J].SBC Journal on Interactive Systems(S2236-3297),2014,5(1):45.
[28]祁彬斌,陳彩華,龐明勇.Haptics 技術在教育教學中的應用研究[J].教育現代化,2015,(1):82-86.
[30]DARRAH M,MVRPHY K,SPERANSKY K,et al.Framework for K-12 Education Haptic Applications[C]// Haptics Symposium,Houston,TX,USA,February 23-26,2014 New York:IEEE,2014:409-414.
(責任編輯 孫志莉)
Haptic Technology and Its Application in Education and Teaching
LIU Lumiao,LI Wei,DAI Jiajia
(School of Education Science,Nanjing Normal University,Nanjing,Jiangsu,China 210000)
Haptic technology provides a new experience of human-machine interaction,which allows users to feel the motion and the force feedback information in the virtual environment through force feedback devices.It is a new means in education and teaching.In this paper we explained the basic concepts of the haptic technology and how it works,followed by a summary of main haptic devices and the key technologies included in haptic technology.We found that it features with diversified educational phases,educational areas and educational modes after our work on the analysis and summary of the application of the haptic technology in education and teaching.
force feedback;haptic technology;haptic device;education and teaching application
G4
A
2096-0069(2017)02-0034-08
2017-02-14
江蘇省社會科學基金項目(15TQB005);江蘇省現代教育技術研究2014年度課題(2014-R-33356);江蘇省高校自然科學基金項目(11KJB520008)
劉路苗(1990— ),女,河南安陽人,南京師范大學教育技術系研究生,研究方向為數字幾何處理;李偉(1990— ),男,山東泰安人,南京師范大學教育技術系研究生,研究方向為數字幾何處理;戴佳佳(1993— ),女,安徽蕪湖人,南京師范大學教育技術系研究生,研究方向為數字幾何處理。
猜你喜歡
華人時刊(2022年13期)2022-10-27 08:55:52
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代陜西(2022年4期)2022-04-19 12:08:52
福建基礎教育研究(2019年9期)2019-05-28 01:34:27
電子制作(2018年11期)2018-08-04 03:26:08
北京教育·普教版(2018年1期)2018-01-29 20:45:18
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
工業設計(2016年12期)2016-04-16 02:52:00