高速轉向穩定模擬實驗裝置
2017-04-27 05:25:55楊全利
制造業自動化 2017年4期
關鍵詞:設計
楊全利,張 叢
(天津職業技術師范大學,天津 300222)
高速轉向穩定模擬實驗裝置
楊全利,張 叢
(天津職業技術師范大學,天津 300222)
應用動力學中陀螺力矩及陀螺效應的基本理論,設計制作了高速轉向穩定模擬實驗裝置。該裝置可以直觀地顯示出陀螺效應,通過裝置所顯示的陀螺轉速、物體轉向轉速和陀螺力矩的數值,定性、定量地模擬出對高速轉向物體施加陀螺力矩的實際效果。實驗證明,該裝置測試的陀螺力矩數值與理論計算值的誤差在5%以內,可作為理論力學實驗教學的重要儀器,為重心較高的高速轉向物體的設計和制造提供重要的參考數據。
陀螺力矩;陀螺效應;模擬實驗裝置
0 引言
車輛或輪船一些重心比較高的物體,在高速度下轉向時,離心力會使其受到側翻力矩作用,在此類物體上加裝高速旋轉的陀螺轉子,利用其轉向時的牽連角速度對該物體施加陀螺效應,所產生的陀螺力矩可部分抵消這些物體轉向時離心慣性力所產生的側翻力矩,從而提高其轉向時的穩定性。本文應用動力學中陀螺力矩及陀螺效應的基本理論,設計制作了高速轉向穩定模擬實驗裝置。
1 高速轉向穩定模擬實驗裝置總體設計
1.1 控制箱與主體的設計
1)電控制箱
包括開關及其他電器元件的選擇與控制柜的設計制作,根據元器件的大小極其類別,將控制柜設計三層,為了能直觀的觀測測試數據,將測力儀擱置上層中間,由于勵磁調速器只起控制作用,不顯示數據,放置于底層內部,為了在實驗中人性化撥動轉向開關,將轉向控制開關放置面板左下角,為了匹配控制單元,不使操作者在操縱開關過程中混亂,將轉向轉速調節旋鈕和轉向開關按鈕擱置轉向控制開關的旁邊,與其對應,將轉向轉速顯示儀擱置在轉向控制單元的上面中間層板的左邊,陀螺轉速測速儀與轉向轉速顯示儀采用的是同一型號的儀器,為了使控制面板看起來美觀及其合理性,將陀螺轉速測速儀擱置在中間層板的右邊,相應的將陀螺轉速調節旋鈕擱置在下方,將總電源開關擱置在轉向開關與陀螺轉速調節旋鈕的中間。最終設計效果圖如圖1所示。

圖1 電控制箱
2)裝置主體
包括陀螺轉子軸、板件、傳動部分的參數選擇與設計制作,及電機的選擇。為了能使電機的轉動帶動裝置的轉向,采用蝸輪蝸桿傳動,根據選用的傳感器裝置的大小,保證陀螺托板與傳感器層板的間距至少要高出傳感器的高度1~2mm,為了使受力均勻及美觀,將層板支撐筋擱置中間,為了避免在測試過程中受裝置自重的影響,將電機與陀螺轉子軸放置在重力矩相互平衡的地方,以免裝置在轉向過程中連續轉向角使電線纏繞,將裝置轉向行程設置為-90°~90°,其示意圖如圖2所示。
1.2 控制箱與主體控制線路圖與功能說明
控制箱的各個部分相應元件控制主體每個單元動作,見圖示3。其中“勵磁I”連接“轉向控制器”和轉向“調速I”旋鈕,連接主體轉向電機,控制著裝置整體轉向,由“轉速傳感器II”反饋至“轉向轉速”顯示儀上。“勵磁II”連接“調速II”旋鈕,連接主體“陀螺驅動電機”,控制陀螺轉速,由“轉速傳感器I”反饋至“陀螺轉速”顯示儀上。動反力由“測力傳感器I” 和“測力傳感器II”反饋至“測力顯示儀”上。“限位裝置”與“轉向控制器”連接,當裝置轉向達到轉向最大行程(-90°~90°)時,限位開關起作用,使裝置停止。其動作原理圖如圖7所示。
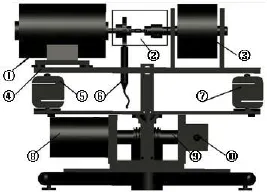
圖2 裝置整體
2 驅動電機的選擇與陀螺的設計
2.1 陀螺力矩的計算與電機的選擇
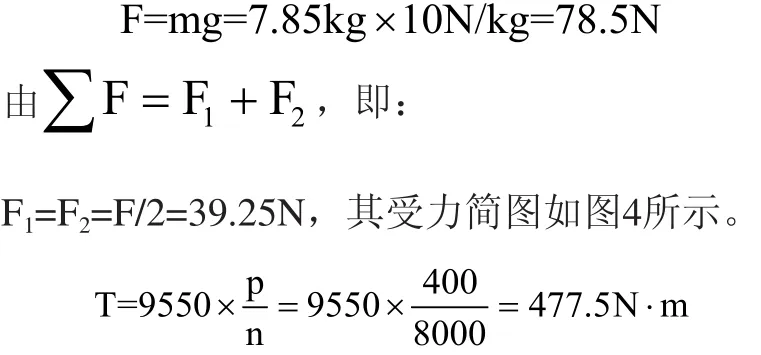
本裝置的測力點距中心支點的距離為0.22m,取轉向轉速為10r/min,則:

轉子的質量m=7.85kg,回轉半徑R=60mm,則:

轉子的額定轉速為:
則陀螺力矩:

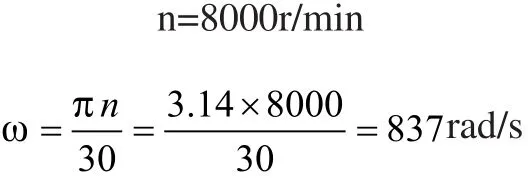
根據轉子的額定轉速和陀螺力矩的最大值,選擇螺驅動電機為上海金陵雷戈勃勞伊特電機有限公司的單相串激電動機,型號為:U400/800-220,質量為6kg,額定轉速為8000r/min,功率為400W,電壓為220V,電流為3.5A,啟動力矩為2N.m。即陀螺驅動電機轉動慣量:

啟動力矩的計算:J1α= M2,若取ω=837rad/s,則2秒內α=28rad/s, M2=0.3N.m,即所選電機符合實驗設計要求。
2.2 陀螺轉子軸的設計及滾動軸承的選擇
1)按扭轉強度進行計算
按照扭轉強度進行計算,按轉矩T來計算,許用扭轉應力[τ]予以降低,以補償彎矩的影響。對于實心軸,其強度條件式為:
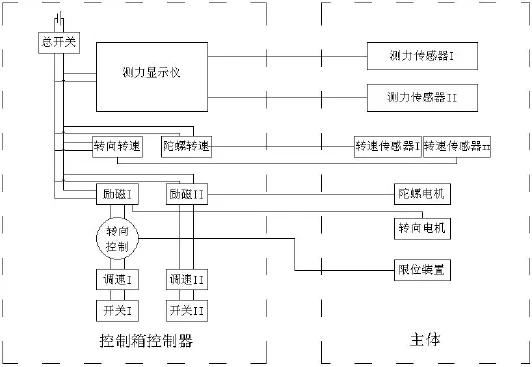
圖3 控制線路圖

改寫成計算軸的直徑的設計計算公式則為:

式中:T為工作扭矩(Nmm),Wt為軸的抗扭截面系數(mm3),P為軸傳遞的功率(kw),n為軸的轉速(r/min),C為與許用扭轉應力[τ]有關的系數,對于45號鋼,C=107~118(對應的[τ]=40~30N/mm2)。只承受扭矩或所受彎矩與扭矩相比較小時,C取較小值,反之取較大值。
計算軸的直徑為:

2)按扭轉剛度進行計算
對于扭轉剛度要求較高的軸,可用此法計算。
圓柱軸扭轉角?的計算式為:
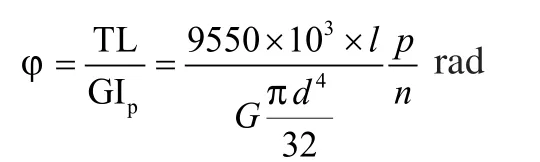
若限制軸的扭轉變形,使軸每米長的扭轉角不超過30°,并取鋼的剪切彈性模量G=81000N/mm2,則軸的直徑為:
計算軸的直徑:d≥(91~108)。

即確定轉子軸的直徑最小要大于11.4mm。
3)動應力的校核
陀螺轉子軸的最大轉動角速度為:
其角加速度為:
按動靜法,慣性力偶矩:

橫截面上的扭矩:

最大扭轉切應力為:

即陀螺轉子軸滿足動應力強度要求。
4)陀螺轉子軸的受力分析
陀螺轉子軸承支撐板間距為131mm,其中心受力:
其扭矩圖如圖5所示。

其彎矩圖如圖6所示。
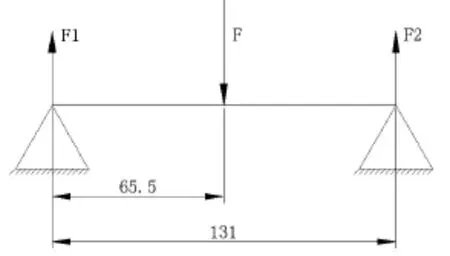
圖4 陀螺轉子軸受力簡圖

圖5 陀螺轉子軸扭矩圖
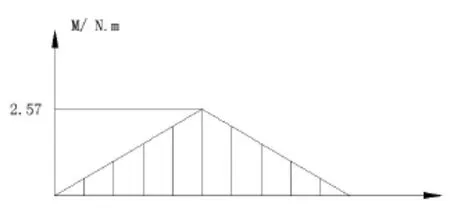
圖6 陀螺轉子軸彎矩圖
根據陀螺轉子軸的設計,查《機械設計手冊》選擇軸承的類型6804,d=20mm,D=32mm,B=7mm,額定動載荷4000N,額定靜載荷2470N,極限轉速n=22000r/min。
3 限位開關座
本裝置設計的轉向行程為-90°~90°,以免裝置轉向時過行程,在裝置上加裝限位開關。由行程范圍可知,限位開關需安裝在與裝置中心共線并與裝置在0°即不動作時垂直。傳感器層板端面與支撐點的距離為250mm,蝸桿墊板與裝置中心的距離為140mm,即行程開關可放置在140mm至250mm處,傳感器層板距落地支架支板的距離為100mm,即所選擇的為浙江天正電氣股份有限公司的型號為LX(ME-8104)的限位開關。
限位開關座需設計一塊托板和兩塊支撐板。限位開關與裝置控制箱的轉向開關連接控制裝置整體的轉向與停止。其電路如圖7所示。
4 傳感器
4.1 傳感器組成框圖
傳感器一般由敏感元件、轉換元件、基本轉換電路三部分組成,組成框圖如圖8所示。

圖8 傳感器組成框圖
敏感元件:它是直接感受被測量,并輸出與被測量成確定關系的某一物理量的元件。
轉換元件:敏感元件的輸出就是它的輸入,它把輸入轉換成電路參量。
基本轉換電路:上述電路參數接入基本轉換電路(簡稱轉換電路),便可轉換成電量輸出。傳感器只完成被測參數至電量的基本轉換,然后輸入到測控電路,進行放大、運算、處理等進一步轉換,以獲得被測值或進行過程控制。
最后,加強部門間溝通協調。科研項目實施單位要統籌協調好各部門,成立由項目管理部門、財務部門、項目實施部門共同參與的績效評價工作小組,明確工作職責,多效并舉,共同促進績效評價工作規范有序進行。
敏感元件與轉換元件在結構上常是裝在一起的,而轉換電路為了減小外界的影響也希望和它們裝有一起,不過由于空間的限制或者其它原因,轉換電路常裝入電箱中。盡管如此,因為不少傳感器要在通過轉換電路后才能輸出電量信號,從而決定了轉換電路是傳感器的組成環節之一。
4.2 傳感器的選擇與安裝
1)測力傳感器
本實驗裝置的測力范圍數值不大,所選用的是秦皇島市信恒電子科技有限公司的CL-1型測力儀,配備的CLF-L1型的測力傳感器:量程0~±490N(50kg)。
根據測力傳感器件的裝置結構和預先設計在旋轉板上的傳感器安放位置,在傳感器層板上先行鉆好工藝孔及攻絲,通過螺釘直接將傳感器緊固在層板上。
2)測速傳感器
本實驗裝置的額定轉速為8000r/min。所選用的是大連美天三有電子儀表有限公司的MCS-Ⅱ型微機測速儀,測量范圍為0~9999r/min。
5 陀螺力矩的測試
5.1 陀螺力矩的測試
測試裝置在不同的轉速下轉向時的陀螺力矩。通過測力儀的左右讀數窗口讀出轉向時的動反力值,傳感器觸點到陀螺陀螺托板軸承支撐點間的距離為220mm,動反力與其乘積即為陀螺力矩。下表為裝置轉向轉速為5r/min和10r/min的動反力數值,并將實測值與理論值作比較。裝置轉向轉速為5r/min(即ωe=v/r=0.38rad/s)時數據如表1所示,裝置轉向轉速為10r/min(即ωe=v/ r=0.76rad/s)時數據如表2所示。
5.2 相對誤差分析
通過測試的數據與理論計算值作比較,該裝置測試的陀螺力矩數值與理論計算值的相對誤差在5%以內,主要原因如下:
1)加工過程中質量誤差;
2)安裝過程中定位誤差;
3)理論數據值計算誤差;
4)實驗過程中無法準確捕捉轉向轉速和陀螺轉子轉速的準確值。
6 結論
1)本模擬裝置可以直觀地顯示出陀螺效應,通過所測定的陀螺轉速,物體轉向轉速和動反力的數值,定性、定量地模擬出對高速轉向物體施加的陀螺力矩的實際效果。
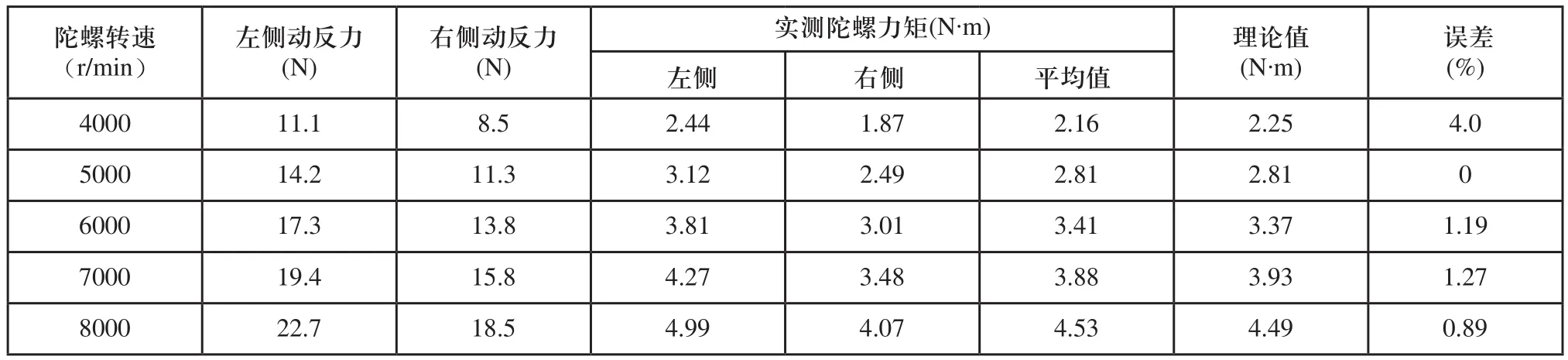
表1 裝置轉向轉速為5r/min數據
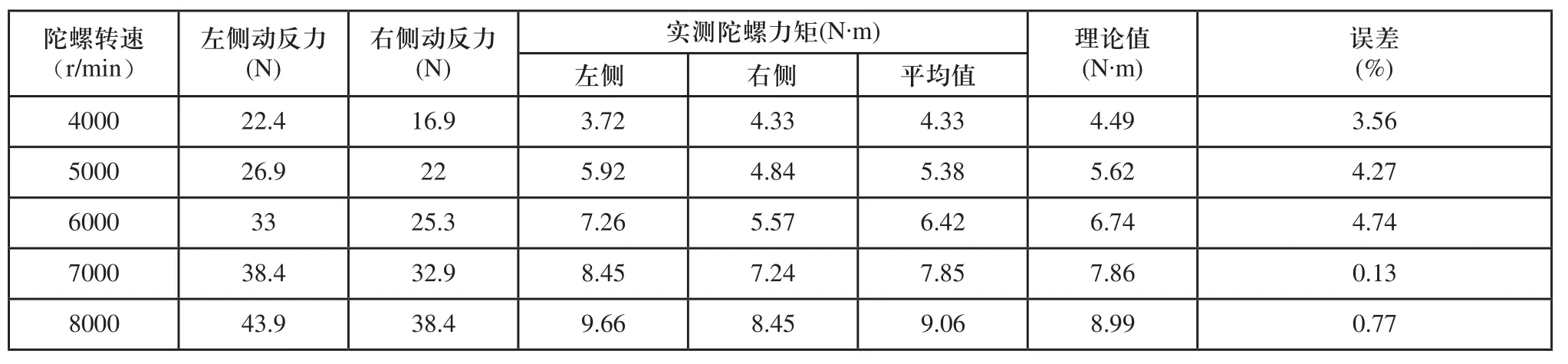
表2 裝置轉向轉速為10r/min數據
2)陀螺力矩可部分抵消重心較高物體轉向時離心慣性力所產生的側翻力矩,能夠大幅度提高重心比較高的物體在高速下轉向時的穩定性。
3)裝置測試的陀螺力矩數值與理論計算值的相對誤差在5%以內。
4)所設計制作的高速轉向穩定模擬實驗裝置可作為理論力學實驗教學的重要儀器。
5)為重心較高的高速轉向物體的設計和制造提供重要的參考依據。
6)本設計仍存不足,如電機轉動時產生噪聲和振動,可選擇綜合性能高的電機和在聯軸部分做改進,可以減小振動和噪音。
[1] 程勒,等.《工程力學》Ⅲ專題部分[M].機械工業出版社.
[2] 曰堯摩托車的陀螺效應[J].摩托車技術.1991,2.
[3] 劉延柱,等.竹蜻蜓與回旋鏢[J].力學與實踐.2008,30.
[4] 于靈慧,防建成等.控制力矩陀螺高速轉子穩定性控制仿真研究[J].系統仿真學報.2007,19(9).
[5] 汪希平,陳學軍,等.陀螺效應對電磁軸承系統設計的影響[J].機械工程學報.2001,37(4).
[6] 陳明,等.陀螺效應的實驗與教學探索[J].力學與實踐.2003,25.
[7] 隋永楓,呂和祥,等.陀螺效應對轉子橫向振動的影響分析[J].計算機力學學報,2003,20(6).
[8] 車勝創,等.基于陀螺理論的振動壓實機械的力學特性和性能[J].長安大學學報,2004,24(4).
[9] 李錦明.電容式微機械陀螺儀設計[M].北京:國防工業出版社,2006.
[10] 蔡大文,等.考慮陀螺力矩時軸的臨界轉速計算[J].西安工業學院學報.1995,15(2).
[11] 容吉利,楊樹興,等.細長自旋彈箭飛行時橫向自振特性的有限元法[J].北京理工大學學報,2001,21(4).
[12] 劉延柱,等.趣談自行車運動[J].力學與實踐,2008,30.
[13] 王國林,黃蕾,高涵文,楊建,等.基于MATLAB/SIMULINK的車輪外傾角對車輛高速轉向穩定性的影響研究[J].汽車技術,2007,11:32-36.
[14] 李建平,王之爍,馬綱.機械設計手冊[M].北京:航空航天大學出版社.
[15] 劉洪文.材料力學[M].北京:高等教育出版社.
[16] 李國柱.機械設計與理論[M].北京:科學出版社.
[17] 劉鴻文,呂榮坤.材料力學實驗[M].北京:高等教育出版社,2006.
[18] 張如一.應力電測與傳感器[M].北京:清華大學出版社,1993.
[19] 朱一綸,王壽榮,裘安萍.硅微機械諧振式陀螺儀[J].中國慣性技術學報,2003,11(4):45-48.
Simulation experiment device of a stable at a high speed
YANG Quan-li, ZHANG Cong
TH12
A
1009-0134(2017)04-0128-05
2017-01-16
楊全利(1966 -),男,實驗師,本科,研究方向為機械設計、機械制造、機械創新和材料力學等。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
