一種動(dòng)態(tài)環(huán)境下多Agent的協(xié)作方法
2017-04-27 06:30:05吳坤劉瑋李爽王晶
武漢工程大學(xué)學(xué)報(bào) 2017年2期
吳坤,劉瑋*,李爽,王晶
1.武漢工程大學(xué)計(jì)算機(jī)科學(xué)與工程學(xué)院,湖北武漢 430205;
2.智能機(jī)器人湖北省重點(diǎn)實(shí)驗(yàn)室(武漢工程大學(xué)),湖北武漢 430205
一種動(dòng)態(tài)環(huán)境下多Agent的協(xié)作方法
吳坤1,2,劉瑋1,2*,李爽1,2,王晶1,2
1.武漢工程大學(xué)計(jì)算機(jī)科學(xué)與工程學(xué)院,湖北武漢 430205;
2.智能機(jī)器人湖北省重點(diǎn)實(shí)驗(yàn)室(武漢工程大學(xué)),湖北武漢 430205
對(duì)動(dòng)態(tài)環(huán)境下多Agent系統(tǒng)中Agent的協(xié)作問(wèn)題進(jìn)行了研究,提出了一種基于連續(xù)規(guī)劃的動(dòng)態(tài)環(huán)境下多Agent協(xié)作方法.首先,在MA-PDDL的語(yǔ)法上進(jìn)行了改進(jìn),通過(guò)一個(gè)自定義的函數(shù)使其能夠描述連續(xù)規(guī)劃方法;然后,提出了一種基于擴(kuò)展的MA-PDDL的連續(xù)規(guī)劃算法,能夠處理動(dòng)態(tài)環(huán)境在系統(tǒng)中所造成的不確定性;最后,實(shí)現(xiàn)了擴(kuò)展的MA-PDDL的解析方法,解析的結(jié)果能夠用于模擬Agent執(zhí)行任務(wù)的過(guò)程.選取了醫(yī)療垃圾無(wú)人運(yùn)輸場(chǎng)景進(jìn)行實(shí)驗(yàn),成功模擬了整個(gè)實(shí)驗(yàn)場(chǎng)景的運(yùn)行過(guò)程,驗(yàn)證了方法的可行性.
動(dòng)態(tài)環(huán)境;MAS;多Agent協(xié)作;連續(xù)規(guī)劃;MA-PDDL
多Agent系統(tǒng)(multi-agent system,MAS)是分布式人工智能領(lǐng)域研究的熱點(diǎn)之一,已經(jīng)成為分布式人工智能研究的一個(gè)重要分支,關(guān)于Agent的協(xié)作問(wèn)題一直是MAS研究的核心問(wèn)題.
傳統(tǒng)領(lǐng)域關(guān)于多Agent協(xié)作問(wèn)題的研究是建立在MAS的環(huán)境不變或者可預(yù)測(cè)的基礎(chǔ)之上,例如經(jīng)典合同網(wǎng)協(xié)議(contract net protocol,CNP)[1]、組織結(jié)構(gòu)協(xié)作[2]、黑板模型[3]等.但是MAS的環(huán)境從封閉到開(kāi)放,從可預(yù)知到不確定的變化,要求多Agent的協(xié)作方法必須能夠適用于動(dòng)態(tài)環(huán)境下的MAS,上述方法均無(wú)法解決實(shí)際問(wèn)題,因此關(guān)于動(dòng)態(tài)環(huán)境下的多Agent協(xié)作方法研究就顯得非常的重要.
近幾年研究人員已經(jīng)開(kāi)始嘗試解決動(dòng)態(tài)環(huán)境下MAS中的Agent協(xié)作問(wèn)題.其中一類(lèi)研究是在傳統(tǒng)方法的基礎(chǔ)上進(jìn)行改進(jìn),例如林琳和劉鋒[4]在合同網(wǎng)的投標(biāo)過(guò)程中引入了信任度、感知系數(shù)和活躍度等智能參數(shù),在熟人庫(kù)(acquaintance)中進(jìn)行招標(biāo),通過(guò)公共消息黑板發(fā)布標(biāo)書(shū)讓Agent主動(dòng)接受任務(wù),引入了一個(gè)評(píng)估函數(shù)定期對(duì)Agent進(jìn)行評(píng)估,更新其能力以及管理Agent對(duì)其的信任度.該方法雖然具有一定的靈活性并且可以提高效率,但是由于動(dòng)態(tài)環(huán)境的實(shí)時(shí)變化,導(dǎo)致系統(tǒng)更新過(guò)于頻繁以至于增大系統(tǒng)壓力,而更新太慢又可能導(dǎo)致信息沒(méi)有同步而發(fā)生錯(cuò)誤.另一類(lèi)方法是和人工智能相結(jié)合,例如唐賢倫等[5]提出了基于改進(jìn)蟻群算法的多Agent協(xié)作策略解決了在未知環(huán)境下的多Agent協(xié)作問(wèn)題,首先由Agent在未知環(huán)境下對(duì)任務(wù)進(jìn)行搜尋,然后將收集到的信息通過(guò)黑板模型進(jìn)行信息共享,最終完成所有的任務(wù).該方法在可預(yù)測(cè)的未知環(huán)境下是可行的,但是如果環(huán)境會(huì)動(dòng)態(tài)變化且無(wú)法預(yù)知?jiǎng)t不再適用了.
智能規(guī)劃(AI planning)是用人工智能理論與技術(shù)自動(dòng)或半自動(dòng)地生成一組動(dòng)作序列,用以實(shí)現(xiàn)期望的目標(biāo)[6].近年來(lái),有關(guān)智能規(guī)劃的研究在問(wèn)題描述和問(wèn)題求解兩方面得到了新的突破,使得智能規(guī)劃已成為一個(gè)熱門(mén)的人工智能研究領(lǐng)域.由于智能規(guī)劃的研究對(duì)象和研究方法的轉(zhuǎn)變,極大地?cái)U(kuò)展了智能規(guī)劃的應(yīng)用領(lǐng)域,在太空飛船[7]、衛(wèi)星[8]、智能機(jī)器人[9-11]等眾多領(lǐng)域都有著十分廣泛的應(yīng)用.
使用智能規(guī)劃來(lái)解決Agent協(xié)作問(wèn)題時(shí)具有專(zhuān)門(mén)的規(guī)劃語(yǔ)言.最早的規(guī)劃語(yǔ)言是STRIPS[13],由Richard Fikes和Nils J.Nilsson在1971年提出,他們?cè)诨谶壿嫷囊?guī)劃問(wèn)題表示上引入了過(guò)程化表示和語(yǔ)義,隨后發(fā)展成為經(jīng)典規(guī)劃中最主要的描述語(yǔ)言,幾乎所有的規(guī)劃系統(tǒng)都采用STRIPS語(yǔ)言或其一個(gè)變種來(lái)描述規(guī)劃問(wèn)題.1998年,McDer-mott提出了規(guī)劃領(lǐng)域定義語(yǔ)言(planning domain definition language,PDDL)[14],并逐漸成為國(guó)際智能規(guī)劃比賽IPC公認(rèn)的標(biāo)準(zhǔn).
隨著MAS的廣泛應(yīng)用與研究,關(guān)于多Agent的規(guī)劃語(yǔ)言也得到了快速的發(fā)展,出現(xiàn)了大量的多Agent規(guī)劃語(yǔ)言,多Agent規(guī)劃領(lǐng)域定義語(yǔ)言(multi-agent PDDL,MA-PDDL)就是其中的一種. MA-PDDL是由Kovacs[15]在2012年提出來(lái)的,主要針對(duì)PDDL3.1的巴科斯范式(Backus-Naur Form,BNF)作了如下擴(kuò)展:在requirements中加入了multi-agent的依賴(lài),使PDDL3.1能夠支持多Agent規(guī)劃;在動(dòng)作的定義中引入了Agent參數(shù),當(dāng)一個(gè)動(dòng)作需要另一個(gè)Agent動(dòng)作的效果時(shí),可以直接將協(xié)作動(dòng)作以參數(shù)的形式引用到當(dāng)前的動(dòng)作中,這樣就可以靈活的描述多個(gè)Agent之間的協(xié)作以及動(dòng)作之間的相互影響;在問(wèn)題的定義中引入了goal參數(shù),多個(gè)Agent可以有相同的goal,要實(shí)現(xiàn)這些goal就必須要這些Agent一起協(xié)作完成,這樣就可以描述多Agent之間的協(xié)作問(wèn)題了.但是由于PD-DL3.1中假設(shè)環(huán)境是靜態(tài)的而且是完全可觀(guān)察的,所以MA-PDDL也存在這種假設(shè),因此MA-PDDL雖然能夠描述多Agent的協(xié)作問(wèn)題,但是不能直接應(yīng)用于動(dòng)態(tài)環(huán)境下的MAS中.
總的來(lái)說(shuō),目前缺乏一種有效可行的方法來(lái)解決動(dòng)態(tài)環(huán)境下的多Agent協(xié)作問(wèn)題,針對(duì)這一現(xiàn)狀,本文對(duì)動(dòng)態(tài)環(huán)境下的MAS中Agent協(xié)作問(wèn)題進(jìn)行了研究,提出了一種基于連續(xù)規(guī)劃的多Agent協(xié)作方法.對(duì)MA-PDDL進(jìn)行了改進(jìn),在語(yǔ)言中加入了連續(xù)規(guī)劃元素,使其能夠通過(guò)連續(xù)規(guī)劃算法解決動(dòng)態(tài)環(huán)境下的多Agent協(xié)作問(wèn)題,避免了傳統(tǒng)方法下任務(wù)執(zhí)行過(guò)程中環(huán)境發(fā)生改變而導(dǎo)致任務(wù)失敗的情況.
1 研究基礎(chǔ)
1.1 智能規(guī)劃
智能規(guī)劃問(wèn)題可表示為一個(gè)五元組<S,S0,G,A,Γ>,其中S是所有可能的狀態(tài)集合,S0?S表示世界的初始狀態(tài),G?S表示規(guī)劃系統(tǒng)希望實(shí)現(xiàn)的目標(biāo)狀態(tài),A表示進(jìn)行狀態(tài)之間轉(zhuǎn)換所需的動(dòng)作集合,狀態(tài)轉(zhuǎn)移關(guān)系Γ?S×A×S定義了每個(gè)動(dòng)作執(zhí)行時(shí)的先決條件和效果[12].采用智能規(guī)劃方法來(lái)解決問(wèn)題的過(guò)程就是在A集合中找到一組動(dòng)作序列,使得當(dāng)前系統(tǒng)的狀態(tài)由S0變?yōu)镚.假設(shè)完成一個(gè)任務(wù)需要兩個(gè)動(dòng)作,用智能規(guī)劃來(lái)解決問(wèn)題的示意圖如圖1所示.

圖1 智能規(guī)劃示意圖Fig.1Schematic diagram of intelligent planning
1.2 規(guī)劃語(yǔ)言
使用規(guī)劃語(yǔ)言對(duì)智能規(guī)劃問(wèn)題進(jìn)行描述時(shí)通常包括領(lǐng)域描述和問(wèn)題描述,其中領(lǐng)域描述主要是定義整個(gè)領(lǐng)域當(dāng)中的參數(shù),以及領(lǐng)域中的對(duì)象可以執(zhí)行的動(dòng)作,用以反映整個(gè)領(lǐng)域的行為.而問(wèn)題描述則包括規(guī)劃的對(duì)象、系統(tǒng)初始狀態(tài)和目標(biāo)狀態(tài),是對(duì)實(shí)際規(guī)劃的問(wèn)題進(jìn)行描述.
定義1多Agent規(guī)劃的領(lǐng)域描述是一個(gè)四元組D=<O,V,F(xiàn),A>,其中O表示系統(tǒng)中所有的對(duì)象集合,可以是Agent,也可以是其他的普通對(duì)象;V表示系統(tǒng)中涉及到的所有狀態(tài)變量的集合,即用來(lái)描述整個(gè)領(lǐng)域狀態(tài)的變量,一般用邏輯謂詞來(lái)描述;F表示函數(shù)的集合;A表示動(dòng)作的集合.
定義2動(dòng)作a是一個(gè)三元組<Ag,P,E>,a∈A,P∈V,E∈V.其中Ag為執(zhí)行動(dòng)作的Agent,P是動(dòng)作執(zhí)行的前提條件,E是動(dòng)作執(zhí)行之后所產(chǎn)生的效果.一個(gè)動(dòng)作a<ag,p,e>表示一個(gè)Agent(ag)在系統(tǒng)狀態(tài)為p的情況下,執(zhí)行動(dòng)作a之后系統(tǒng)狀態(tài)變?yōu)閑.
定義3問(wèn)題描述為Q=<I,G>,I為系統(tǒng)的初始狀態(tài),G為需要達(dá)到的目標(biāo)狀態(tài).若經(jīng)過(guò)一系列的規(guī)劃動(dòng)作之后,系統(tǒng)狀態(tài)變?yōu)镚,則表示該問(wèn)題已經(jīng)被解決了.
1.3 連續(xù)規(guī)劃
在傳統(tǒng)的規(guī)劃方法中,規(guī)劃者必須考慮整個(gè)系統(tǒng)中可能出現(xiàn)的所有情況,規(guī)劃出Agent相應(yīng)的動(dòng)作,同時(shí)設(shè)定Agent從開(kāi)始到結(jié)束都對(duì)整個(gè)系統(tǒng)有著完整的正確的知識(shí),且動(dòng)作一定會(huì)產(chǎn)生預(yù)期的效果.這種方法對(duì)于環(huán)境相對(duì)穩(wěn)定,Agent獨(dú)立完成任務(wù)且各Agent之間沒(méi)有相互影響的系統(tǒng)來(lái)說(shuō)是可行的,但是對(duì)于動(dòng)態(tài)環(huán)境中Agent的動(dòng)作會(huì)對(duì)其他Agent產(chǎn)生影響的系統(tǒng)來(lái)說(shuō)是行不通的.
為了解決多Agent在動(dòng)態(tài)環(huán)境下的規(guī)劃問(wèn)題,Brenner和Nebel[16]提出了連續(xù)規(guī)劃算法.與傳統(tǒng)的規(guī)劃方法不同,連續(xù)規(guī)劃并不需要事先考慮所有的可能事件,而是由Agent自己決定如何去實(shí)現(xiàn)他們的目標(biāo),換句話(huà)說(shuō)就是Agent在完成目標(biāo)任務(wù)的過(guò)程中可以自己規(guī)劃自己的行動(dòng).
連續(xù)規(guī)劃方法的核心思想就是當(dāng)Agent對(duì)周?chē)h(huán)境未知或者掌握的知識(shí)不足以完成規(guī)劃的動(dòng)作時(shí),Agent可以延遲規(guī)劃動(dòng)作的執(zhí)行,然后通過(guò)自身的感知能力或者通過(guò)與其他Agent通信,獲取更加準(zhǔn)確的信息,不斷地更新知識(shí)直到Agent有足夠的知識(shí)來(lái)完成接下來(lái)的規(guī)劃任務(wù),如圖2所示.與圖1相比,圖2中加入了一個(gè)重新規(guī)劃步驟,需要注意的是這里并不是簡(jiǎn)單的循環(huán)執(zhí)行動(dòng)作Action1,而是通過(guò)系統(tǒng)環(huán)境重新規(guī)劃出一條新的動(dòng)作序列來(lái)完成后面的工作.
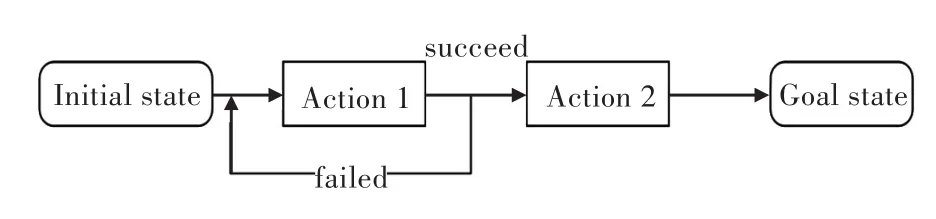
圖2 連續(xù)規(guī)劃示意圖Fig.2Schematic diagram of continual planning
例如讓一個(gè)自動(dòng)導(dǎo)引車(chē)(automated guided vehicle,AGV)將一件貨物M從A點(diǎn)運(yùn)送到B點(diǎn),通過(guò)規(guī)劃方法來(lái)解決這個(gè)問(wèn)題可能需要執(zhí)行以下幾個(gè)動(dòng)作:①AGV移動(dòng)到A點(diǎn);②裝上貨物M;③AGV帶著貨物M從A點(diǎn)移動(dòng)到B點(diǎn);④卸下貨物M.在傳統(tǒng)規(guī)劃方法中,以上幾個(gè)動(dòng)作均被認(rèn)為是瞬間完成,但是在現(xiàn)實(shí)中這些動(dòng)作都是需要一段時(shí)間才能完成.假如在AGV帶著M從A點(diǎn)移動(dòng)到B點(diǎn)的過(guò)程中,原本規(guī)劃的行動(dòng)路線(xiàn)由于突發(fā)情況無(wú)法通過(guò),該規(guī)劃則會(huì)陷入死鎖,最終導(dǎo)致任務(wù)無(wú)法完成.通過(guò)連續(xù)規(guī)劃方法能夠避免這種情況的發(fā)生:當(dāng)AGV在移動(dòng)過(guò)程中發(fā)現(xiàn)道路不通即動(dòng)作③無(wú)法完成時(shí),則會(huì)停下來(lái)感知周?chē)沫h(huán)境,并與其他的AGV進(jìn)行通信來(lái)了解最新的環(huán)境知識(shí),然后重新規(guī)劃一條移動(dòng)路徑繼續(xù)完成動(dòng)作③和動(dòng)作④.
2 基于連續(xù)規(guī)劃的MA-PDDL
2.1 規(guī)劃過(guò)程描述
使用基于連續(xù)規(guī)劃的MA-PDDL來(lái)解決MAS中的多Agent協(xié)作問(wèn)題一般包括如下5個(gè)步驟:
步驟1通過(guò)多Agent領(lǐng)域描述語(yǔ)言描述多Agent系統(tǒng)的當(dāng)前環(huán)境;
步驟2接收用戶(hù)輸入的待解決問(wèn)題,并通過(guò)多Agent領(lǐng)域描述語(yǔ)言進(jìn)行描述;
步驟3根據(jù)描述后的多Agent系統(tǒng)的當(dāng)前環(huán)境和待解決問(wèn)題,規(guī)劃出一條最優(yōu)解決方案,該最優(yōu)方案包括需要執(zhí)行的若干個(gè)動(dòng)作,將若干個(gè)動(dòng)作分別分配給多Agent系統(tǒng)中能夠執(zhí)行相應(yīng)動(dòng)作的Agent;
步驟4多Agent系統(tǒng)中具有執(zhí)行任務(wù)的各Agent根據(jù)該最優(yōu)方案依次完成分配給自己的所有動(dòng)作,當(dāng)確定當(dāng)前動(dòng)作正常完成時(shí),各Agent繼續(xù)下一個(gè)動(dòng)作,直到完成所有動(dòng)作,問(wèn)題得到解決;
步驟5當(dāng)確定當(dāng)前動(dòng)作無(wú)法完成時(shí),停止各Agent當(dāng)前動(dòng)作,通過(guò)Agent的感知功能對(duì)多Agent系統(tǒng)的當(dāng)前環(huán)境進(jìn)行重新感知,并通過(guò)多Agent領(lǐng)域描述語(yǔ)言進(jìn)行重新描述,隨后轉(zhuǎn)至步驟3.
2.2 語(yǔ)法描述
為了在MA-PDDL中使用連續(xù)規(guī)劃算法,對(duì)MA-PDDL的動(dòng)作進(jìn)行了如下定義.
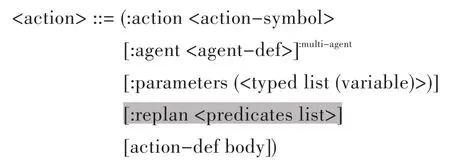
為了實(shí)現(xiàn)整個(gè)多Agent系統(tǒng)的自適應(yīng)性,保證Agent在動(dòng)態(tài)環(huán)境下也能正常完成任務(wù),我們?cè)谠瓉?lái)的動(dòng)作定義中加入了replan這個(gè)子動(dòng)作.其工作原理如下:事先定義一個(gè)觸發(fā)replan的條件,Agent在每次執(zhí)行動(dòng)作之前判斷當(dāng)前環(huán)境是否滿(mǎn)足該條件,一旦滿(mǎn)足條件就會(huì)暫停當(dāng)前動(dòng)作的執(zhí)行,然后通過(guò)自身的感知能力或者與其他Agent通信來(lái)更新對(duì)系統(tǒng)環(huán)境的知識(shí),最后重新規(guī)劃出一條解決問(wèn)題的執(zhí)行方案.如果不滿(mǎn)足該條件則正常執(zhí)行動(dòng)作,若因?yàn)橄到y(tǒng)環(huán)境發(fā)生了改變而導(dǎo)致動(dòng)作無(wú)法執(zhí)行或者動(dòng)作執(zhí)行失敗時(shí),在系統(tǒng)中設(shè)置該觸發(fā)條件.
使用MA-PDDL對(duì)上文中的動(dòng)作③進(jìn)行描述,其程序如下.
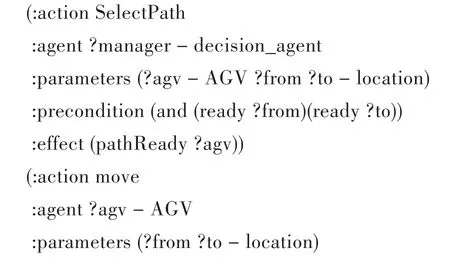
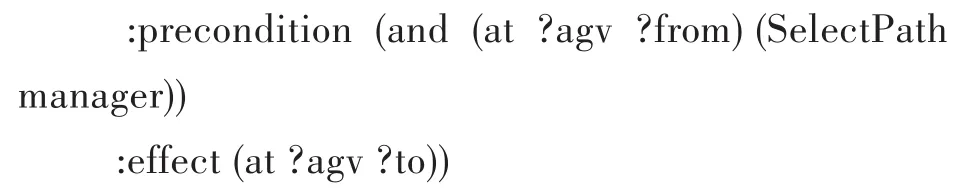
其中manager是一個(gè)決策Agent,可以根據(jù)當(dāng)前系統(tǒng)的環(huán)境規(guī)劃出一條最優(yōu)路徑.當(dāng)agv要從A點(diǎn)移動(dòng)到B點(diǎn)時(shí),必須先選出一條最優(yōu)路徑,此時(shí)需要與manager協(xié)作才能完成,采用MA-PDDL可以很方便的描述這種協(xié)作關(guān)系.
如果manager規(guī)劃完路徑,agv在執(zhí)行動(dòng)作的過(guò)程中環(huán)境發(fā)生了變化,例如路徑被堵塞了,那么該動(dòng)作就無(wú)法完成.使用加入連續(xù)規(guī)劃的MA-PDDL對(duì)該動(dòng)作進(jìn)行描述,其程序如下.
以上描述在原有的基礎(chǔ)上加入了:replan,該方法的觸發(fā)條件是isDone?false.默認(rèn)情況下該條件是isDone?true,當(dāng)動(dòng)作執(zhí)行失敗時(shí)將該條件設(shè)置為isDone?false,滿(mǎn)足該條件表示move動(dòng)作無(wú)法完成,系統(tǒng)無(wú)法達(dá)到預(yù)期效果,此時(shí)Agent會(huì)暫停后續(xù)動(dòng)作的執(zhí)行,然后重新獲取當(dāng)前系統(tǒng)環(huán)境進(jìn)行重新規(guī)劃.
2.3 方法的實(shí)現(xiàn)
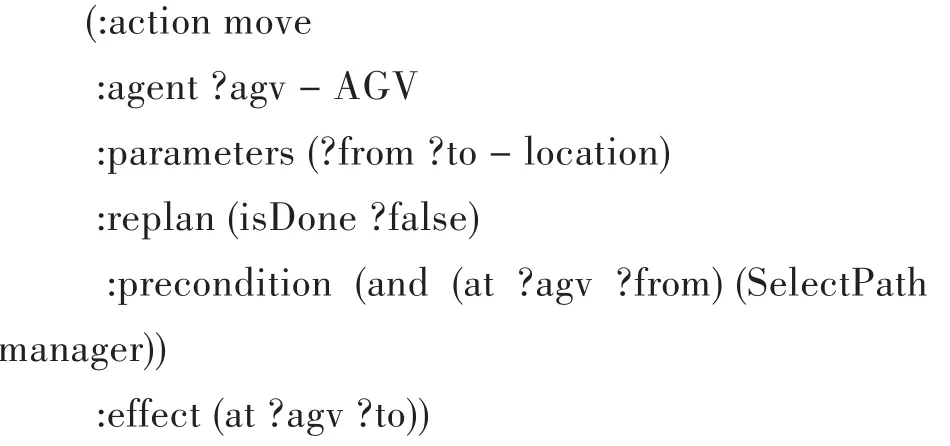
方法的具體實(shí)現(xiàn)過(guò)程如圖3所示,主要包括以下幾個(gè)步驟:
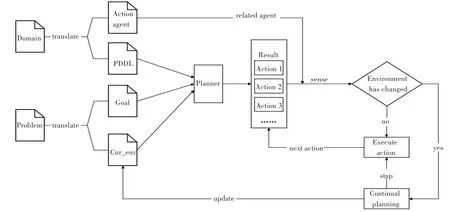
圖3 方法的實(shí)現(xiàn)過(guò)程Fig.3Realization process of method
步驟1使用改進(jìn)后的語(yǔ)言將MAS的領(lǐng)域知識(shí)和需要解決的問(wèn)題描述出來(lái)作為輸入;
步驟2將領(lǐng)域描述Domain轉(zhuǎn)換為傳統(tǒng)的PD-DL和一個(gè)描述Action與Agent關(guān)系的文件,將問(wèn)題描述Problem轉(zhuǎn)換為目標(biāo)狀態(tài)文件Goal和當(dāng)前環(huán)境文件cur_env;
步驟3根據(jù)當(dāng)前環(huán)境、目標(biāo)狀態(tài)和MAS的領(lǐng)域描述規(guī)劃出一條最優(yōu)解決方案,即一系列需要執(zhí)行的動(dòng)作;
步驟4根據(jù)動(dòng)作在Action-Agent關(guān)系文件中找出一個(gè)或多個(gè)Agent來(lái)執(zhí)行動(dòng)作,每次執(zhí)行動(dòng)作之前都檢查一次當(dāng)前系統(tǒng)的環(huán)境是否發(fā)生了改變:系統(tǒng)環(huán)境沒(méi)有變化,滿(mǎn)足動(dòng)作的前提條件,正常執(zhí)行該動(dòng)作,完成之后繼續(xù)執(zhí)行下一個(gè)動(dòng)作;系統(tǒng)環(huán)境發(fā)生了變化,不再滿(mǎn)足動(dòng)作的前提條件,終止該動(dòng)作的執(zhí)行,更新描述當(dāng)前系統(tǒng)環(huán)境的文件,跳轉(zhuǎn)到步驟3.
3 場(chǎng)景建模
醫(yī)院中的醫(yī)療垃圾往往具有傳染性,對(duì)人體有很大的危害,使用人工進(jìn)行運(yùn)輸存在著極大的安全風(fēng)險(xiǎn),使用AGV來(lái)運(yùn)輸則可以避免這種風(fēng)險(xiǎn),而且還可以免去很多人工勞動(dòng).Savant Automation公司在2015年提出了一個(gè)醫(yī)院自動(dòng)運(yùn)輸車(chē)系統(tǒng)(automated hospital cart transportation system)[17],在該系統(tǒng)中AGV被用來(lái)運(yùn)輸食物、醫(yī)療器械以及醫(yī)療垃圾等,并且已經(jīng)投入生產(chǎn)和使用.本文的實(shí)驗(yàn)就是以上述系統(tǒng)為基礎(chǔ),使用了一個(gè)特定的場(chǎng)景進(jìn)行建模,最后通過(guò)模擬運(yùn)行進(jìn)行實(shí)驗(yàn).
在模型中使用Cart存放醫(yī)療垃圾,所有的Cart均放置于相應(yīng)的Pickup上,每個(gè)Pickup上都有一個(gè)射頻識(shí)別標(biāo)簽(Radio Frequency Indentification,RFID)用來(lái)讀取Cart的重量、位置等信息,通過(guò)AGV將Cart從Pickup處運(yùn)送到指定地點(diǎn).整個(gè)場(chǎng)景可以看作是一個(gè)多Agent系統(tǒng),里面包括三種不同的Agent,分別是Cart-sensor、AGV以及decision agent.其中Cart-sensor固定在Pickup處,通過(guò)讀取Pickup上面的RFID獲取Cart的重量和位置等信息,發(fā)布任務(wù);AGV是專(zhuān)門(mén)用來(lái)運(yùn)輸Cart的小車(chē),具有不同載重量;decision agent可以根據(jù)當(dāng)前環(huán)境來(lái)選擇最適合的AGV來(lái)執(zhí)行,同時(shí)可以為AGV規(guī)劃出一條最優(yōu)的移動(dòng)路線(xiàn).
整個(gè)實(shí)驗(yàn)場(chǎng)景如圖4所示,Pickup-Location表示Pickup的位置,也是Cart的存放地點(diǎn);Charge-Location為AGV充電的地方;Destination為 Cart被運(yùn)輸?shù)哪康牡兀籖oad為AGV運(yùn)行的軌跡,表示AGV可達(dá)的路徑;Wall為AGV不可達(dá)的地點(diǎn),可視為障礙物.
圖4 實(shí)驗(yàn)仿真場(chǎng)景Fig.4Experiment scenario
使用定義1對(duì)領(lǐng)域進(jìn)行描述如下.
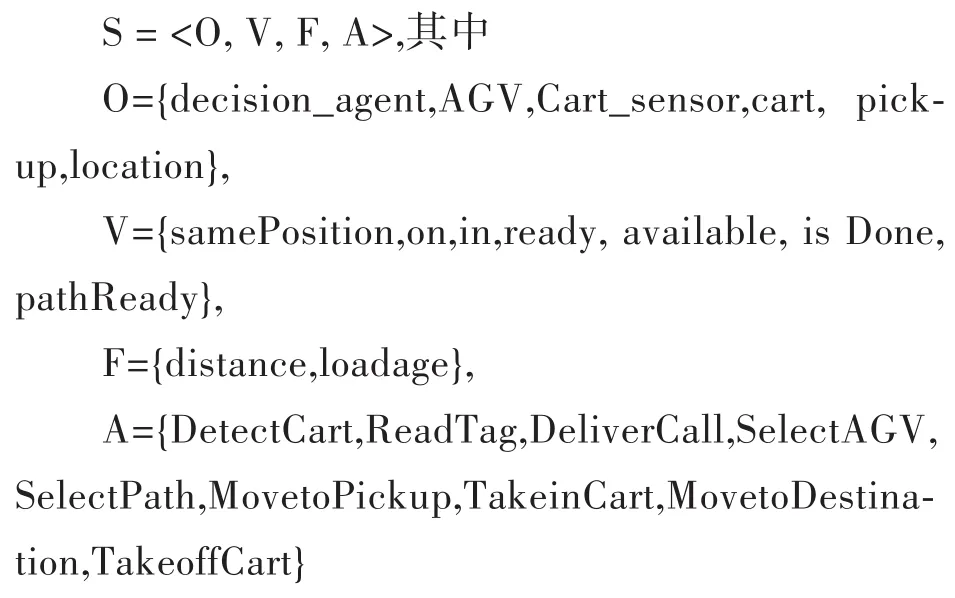
O是系統(tǒng)中的對(duì)象集合,有decision_agent,AGV,Cart_sensor,cart,pickup和location等6個(gè)對(duì)象;V是系統(tǒng)中的狀態(tài)變量集合,samePosition用來(lái)描述2個(gè)對(duì)象在同一個(gè)位置,on用來(lái)描述cart在pickup中,in用來(lái)描述cart在AGV小車(chē)上,ready用來(lái)描述pickup、AGV以及目的地的位置是否確定,available用來(lái)描述是否發(fā)布任務(wù),isDone用來(lái)描述動(dòng)作是否正常完成,pathReady用來(lái)描述行動(dòng)路徑是否規(guī)劃完成;需要用到的函數(shù)包括distance和loadage,前者是求兩點(diǎn)之間的距離,后者是求AGV的載重量,兩個(gè)函數(shù)都是用來(lái)選擇最佳執(zhí)行AGV的;A是系統(tǒng)中所有Agent能夠完成的動(dòng)作的集合,包括DetectCart、ReadTag等9個(gè)動(dòng)作.
使用定義2對(duì)領(lǐng)域中的動(dòng)作進(jìn)行描述如下.
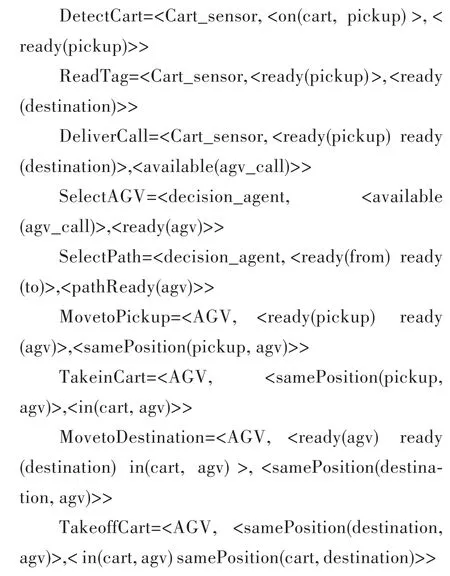
每個(gè)動(dòng)作包含3個(gè)參數(shù):第1個(gè)參數(shù)表示執(zhí)行該動(dòng)作的Agent,第2個(gè)參數(shù)是執(zhí)行該動(dòng)作的前提條件,是一個(gè)狀態(tài)變量的集合,第3個(gè)參數(shù)是執(zhí)行完該動(dòng)作產(chǎn)生的影響,也是一個(gè)狀態(tài)變量的集合.例如DetectCart=<Cart_sensor,<o(jì)n(cart,pick-up)>,<ready(pickup)>>,表示當(dāng)cart在pickup中時(shí),Cart_sensor會(huì)執(zhí)行動(dòng)作DetectCart,成功執(zhí)行完該動(dòng)作之后,pickup的位置信息就確定了.在整個(gè)系統(tǒng)中,Cart_sensor可以執(zhí)行3個(gè)動(dòng)作,deci-sion_agent可以執(zhí)行2個(gè)動(dòng)作,AGV可以執(zhí)行4個(gè)動(dòng)作.
整個(gè)系統(tǒng)的初始狀態(tài)是cart被放置到pickup中,需要完成的任務(wù)是將cart運(yùn)送到專(zhuān)門(mén)的垃圾處理點(diǎn),使用定義3對(duì)問(wèn)題進(jìn)行描述如下所示.

實(shí)驗(yàn)場(chǎng)景中一共有12個(gè)pickup分別位于不同的地方,有兩個(gè)載重量為20 kg的AGV和兩個(gè)載重量為50 kg的AGV,50 kg載重量的AGV能耗更大,同時(shí)能耗也跟運(yùn)輸距離成正比,需要選擇一種能耗最小的方案來(lái)完成任務(wù).
使用java語(yǔ)言對(duì)MA-PDDL和改進(jìn)的MA-PDDL進(jìn)行解析,分別在靜態(tài)環(huán)境以及動(dòng)態(tài)環(huán)境這兩種情況下進(jìn)行實(shí)驗(yàn),通過(guò)語(yǔ)句描述來(lái)代替具體的Agent執(zhí)行動(dòng)作,最后通過(guò)控制臺(tái)打印出Agent的動(dòng)作序列,其運(yùn)行結(jié)果摘錄如圖5和圖6所示.
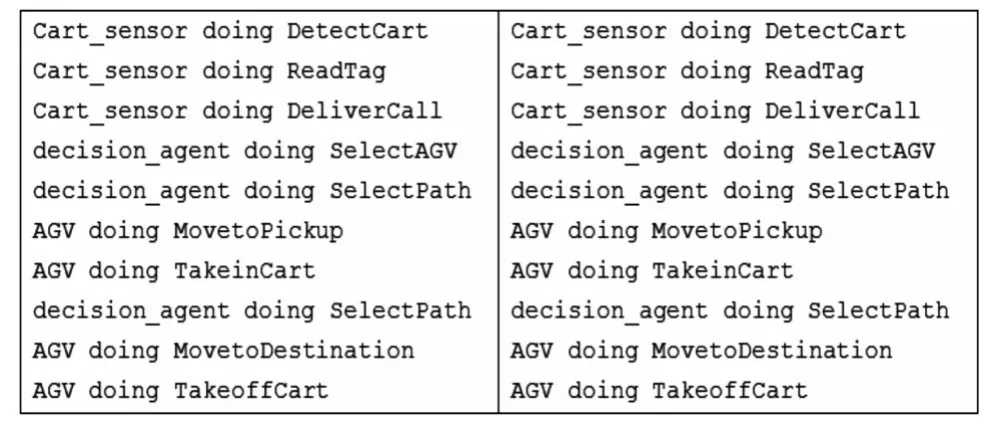
圖5 靜態(tài)環(huán)境下運(yùn)行的結(jié)果Fig.5Results in static environment
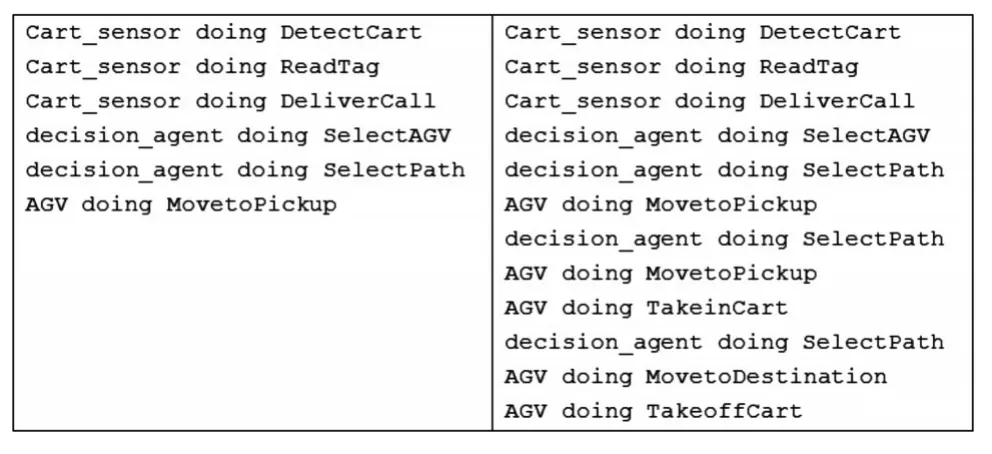
圖6 動(dòng)態(tài)環(huán)境下運(yùn)行的結(jié)果Fig.6Results in dynamic environment
圖5和圖6中左邊是MA-PDDL的運(yùn)行結(jié)果,右邊是改進(jìn)的MA-PDDL的運(yùn)行結(jié)果.可以看到,在靜態(tài)環(huán)境下,兩種方法都可以解決問(wèn)題.但是如果在動(dòng)態(tài)環(huán)境下,MA-PDDL會(huì)停止運(yùn)行,最終導(dǎo)致任務(wù)無(wú)法完成,而基于連續(xù)規(guī)劃的MA-PDDL會(huì)通過(guò)重新規(guī)劃找到一條新的解決方案,直到問(wèn)題得到解決.
原系統(tǒng)中,當(dāng)AGV在執(zhí)行動(dòng)作的過(guò)程中環(huán)境發(fā)生改變時(shí),系統(tǒng)采取的策略是暫停動(dòng)作的執(zhí)行,AGV在原地等待直到系統(tǒng)環(huán)境恢復(fù)預(yù)期情況.如果系統(tǒng)環(huán)境的改變是長(zhǎng)時(shí)間的或者是永久的,那么AGV完成任務(wù)的效率就會(huì)變低,甚至需要人工的參與才能完成任務(wù).實(shí)驗(yàn)結(jié)果顯示,本文提出的方法是可以解決問(wèn)題的,而且可以避免上述情況的發(fā)生,這也證明了在動(dòng)態(tài)環(huán)境下,本文方法與傳統(tǒng)方法相比更有優(yōu)勢(shì).
4 結(jié)語(yǔ)
MA-PDDL在處理動(dòng)態(tài)環(huán)境下的多Agent協(xié)作問(wèn)題時(shí),可能會(huì)出現(xiàn)環(huán)境突然發(fā)生改變而導(dǎo)致任務(wù)無(wú)法完成的情況,針對(duì)這一現(xiàn)狀,提出了一種基于MA-PDDL的連續(xù)規(guī)劃方法.對(duì)MA-PDDL進(jìn)行了改進(jìn),在語(yǔ)言中加入了連續(xù)規(guī)劃元素,使其能夠通過(guò)連續(xù)規(guī)劃算法解決動(dòng)態(tài)環(huán)境下的多Agent協(xié)作問(wèn)題,避免了上述情況的發(fā)生.最后提出了一種改進(jìn)語(yǔ)言的解析方法,實(shí)驗(yàn)成功模擬了醫(yī)療垃圾無(wú)人運(yùn)輸場(chǎng)景的運(yùn)行過(guò)程,實(shí)現(xiàn)了動(dòng)態(tài)環(huán)境下的多Agent協(xié)作.
改進(jìn)之后方法雖然能夠解決問(wèn)題,但是在時(shí)間上卻比MA-PDDL方法消耗更多,因?yàn)楦倪M(jìn)方法在每個(gè)動(dòng)作執(zhí)行前都會(huì)同步一次系統(tǒng)環(huán)境,這個(gè)是需要花費(fèi)時(shí)間的,在之后的研究中將會(huì)考慮將算法進(jìn)行優(yōu)化,爭(zhēng)取在時(shí)間上的消耗達(dá)到最小.
[1]SMITH R G.The contract net protocol:high-level communication and control in a distributed problem solver[J].IEEE Transactions on Computers,1980,29(12):1104-1113.
[2]JENNINGS N R.Commitments and conventions:the foundation of coordination in multi-agent systems[J]. Knowledge Engineering Review,1993,8(3):223-250.
[3]NII P.The blackboard model of problem solving[J].AI Magazine,1986,7(2):38-53.
[4]林琳,劉鋒.基于改進(jìn)合同網(wǎng)協(xié)議的多Agent協(xié)作模型[J].計(jì)算機(jī)技術(shù)與發(fā)展,2010,20(3):71-75.
LIN L,LIU F.A multi-agent cooperation model based onimprovedcontractnetprotocol[J].Computer Technology and Development,2010,20(3):71-75.
[5]唐賢倫,李亞楠,樊崢.未知環(huán)境中多Agent自主協(xié)作規(guī)劃策略[J].系統(tǒng)工程與電子技術(shù),2013,35(2):345-349.
TANG X L,LI Y N,F(xiàn)AN Z.Multi-agent autonomous cooperation planning strategy in unknown environment[J].System Engineering and Electronics,2013,35(2):345-349.
[6]宋涇舸,查建中,陸一平.智能規(guī)劃研究綜述——一個(gè)面向應(yīng)用的視角[J].智能系統(tǒng)學(xué)報(bào),2007,2(2):18-25.
SONG J G,CHA J Z,LU Y P.Survey on AI planning research——anapplication-orientedperspective[J]. CAAI Transactions on Intelligent Systems,2007,2(2):18-25.
[7]CHIEN S,KNIGHT R,STECHERT A,et al.Integrated planning and execution for autonomous spacecraft[J]. IEEE Aerospace and Electronic Systems Magazine,2009,24(1):23-30.
[8]IZZO D,PETTAZZI L.Autonomous and distributed motion planning for satellite swarm[J].Journal of Guidance Control and Dynamics,2015,30(2):449-459.
[9]張彥鐸,李哲靖,魯統(tǒng)偉.機(jī)器人世界杯足球錦標(biāo)賽中多機(jī)器人對(duì)目標(biāo)協(xié)同定位算法的改進(jìn)[J].武漢工程大學(xué)學(xué)報(bào),2013,35(2):69-73.
ZHANG Y D,LI Z J,LU T W.Improvements of collaborative localization algorithm of multi-robot on target in ROBOCUP[J].Journal of Wuhan Institute of Technology,2013,35(2):69-73.
[10]魯統(tǒng)偉,林芹,李熹,等.記憶運(yùn)動(dòng)方向的機(jī)器人避障算法[J].武漢工程大學(xué)學(xué)報(bào),2013,35(4):66-71.
LU T W,LIN Q,LI X,et al.Obstacle avoidance algorithm of robot based on recording move direction[J].Journal of Wuhan Institute of Technology,2013,35(4):66-71.
[11]張彥鐸,葛林鳳.一種新的基于MMAS的機(jī)器人路徑規(guī)劃方法[J].武漢工程大學(xué)學(xué)報(bào),2009,31(5):76-79.
ZHANG Y D,GE L F.A novel method for robot's path planningbasedonandmax-minant system[J]. Journal of Wuhan Institute of Technology,2009,31(5):76-79.
[12]林川.基于PDDL的Web服務(wù)自動(dòng)組合的描述[J].計(jì)算機(jī)應(yīng)用與軟件,2008,25(1):138-139.
LINC.Describitionofautomaticwebservices compositionbasedonPDDL[J].Computer Applications and Software,2008,25(1):138-139.
[13]FIKES R E,NILSSON N J.Strips:a new approach to the application of theorem proving to problem solving[J].Artificial intelligence,1971,2:608-620.
[14]MALIK G,HOWE A,KNOBLOCK C,et al.PDDL-the planning domain definition language,Technical Report CVC TR-98-003/DCS TR-1165[R].Connecticut:Yale Center for Computational Vision and Control,1998.
[15]KOVACS D L.A multi-agent extension of PDDL3.1[C]//TheAssociationfortheAdvancementof ArtificialIntelligence(AAAI).Workshoponthe InternationalPlanningCompetition,ICAPS-2012. Atibaia:AAAI Press,2012:19-27.
[16]BRENNER M,NEBEL B.Continual planning and actingindynamicmultiagentenvironments[J]. Autonomous Agents and Multi-agent Systems,2009,19(3):297-331.
[17]SAVANT AUTOMATION.Automated hospital cart transportationsystem[EB/OL].(2015-06-15)[2017-04-10].http://www.agvsystems.com/hospitalcarts.
本文編輯:陳小平
A Multi-Agent Cooperation Method in Dynamic Environment
WU Kun1,2,LIU Wei1,2*,LI Shuang1,2,WANG Jing1,2
1.School of Computer Science and Engineering,Wuhan Institute of Technology,Wuhan 430205,China;
2.Hubei Key Laboratory of Intelligent Robot(Wuhan Institute of Technology),Wuhan 430205,China
A multi-agent cooperation method was proposed based on multi-agent system continual planning in dynamic environment.First,the Multi-Agent Planning Domain Definition Language(MA-PDDL)was extended for describing the continual planning method by a user-defined function.Then,a continual planning algorithm based on extended MA-PDDL was proposed to deal with the uncertainty.Finally,a parsing method of the extended MA-PDDL was implemented,which simulated how agents execute tasks.The method successfully simulates the execution process of automated cart transportation in hospital,which validates its feasibility.
dynamicenvironment;multi-agentsystem;multi-agentcooperation;continualplanning;MA-PDDL
TP242
A
10.3969/j.issn.1674-2869.2017.02.015
1674-2869(2017)02-0186-07
2016-12-14
國(guó)家自然科學(xué)基金(61502355);國(guó)家測(cè)繪局測(cè)繪地理信息公益性行業(yè)科研專(zhuān)項(xiàng)(201412014);湖北省自然科學(xué)基金(2013CF125);武漢工程大學(xué)科學(xué)研究基金(K201475)
吳坤,碩士研究生.E-mail:kris_wu@foxmaill.com
*通訊作者:劉瑋,博士,副教授.E-mail:liuwei@wit.edu.cn
吳坤,劉瑋,李爽,等.一種動(dòng)態(tài)環(huán)境下多Agent的協(xié)作方法[J].武漢工程大學(xué)學(xué)報(bào),2017,39(2):186-192.
WU K,LIU W,LI S,et al.A multi-agent cooperation method in dynamic environment[J].Journal of Wuhan Institute of Technology,2017,39(2):186-192.
猜你喜歡
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
小學(xué)生作文(低年級(jí)適用)(2018年3期)2018-04-17 00:58:35
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
少年博覽·小學(xué)低年級(jí)(2017年4期)2017-06-09 16:22:28
作文評(píng)點(diǎn)報(bào)·低幼版(2017年7期)2017-03-11 20:49:41
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16