基于光纖反射內(nèi)存網(wǎng)的集成仿真系統(tǒng)動(dòng)態(tài)數(shù)據(jù)關(guān)聯(lián)方法
2017-04-28 02:21:20劉生東劉佳琪楊金鵬伍梅仙
導(dǎo)彈與航天運(yùn)載技術(shù) 2017年2期
關(guān)鍵詞:關(guān)聯(lián)系統(tǒng)
劉生東,劉佳琪,趙 政,楊金鵬,伍梅仙
(北京航天長(zhǎng)征飛行器研究所,北京,100076)
基于光纖反射內(nèi)存網(wǎng)的集成仿真系統(tǒng)動(dòng)態(tài)數(shù)據(jù)關(guān)聯(lián)方法
劉生東,劉佳琪,趙 政,楊金鵬,伍梅仙
(北京航天長(zhǎng)征飛行器研究所,北京,100076)
仿真與試驗(yàn)系統(tǒng)集成面臨的最主要問(wèn)題是不同試驗(yàn)與仿真系統(tǒng)之間在時(shí)間、數(shù)據(jù)和結(jié)構(gòu)三方面的異構(gòu)性。針對(duì)系統(tǒng)集成過(guò)程中的數(shù)據(jù)關(guān)聯(lián)問(wèn)題,提出基于數(shù)據(jù)關(guān)系矩陣的動(dòng)態(tài)數(shù)據(jù)關(guān)聯(lián)方法,并設(shè)計(jì)了該方法的應(yīng)用流程,在綜合集成平臺(tái)的應(yīng)用中得到良好的應(yīng)用效果。
光纖反射內(nèi)存網(wǎng);集成仿真;動(dòng)態(tài)數(shù)據(jù)關(guān)聯(lián)
0 引 言
隨著航天飛行器越來(lái)越復(fù)雜,功能越來(lái)越多,在研制過(guò)程中,除了采用數(shù)學(xué)仿真進(jìn)行性能評(píng)估外[1,2],人們?cè)絹?lái)越多地采用半實(shí)物仿真技術(shù)進(jìn)行參數(shù)優(yōu)化、方案優(yōu)選、性能評(píng)估,既節(jié)省經(jīng)費(fèi)和研制周期也提高了產(chǎn)品設(shè)計(jì)的可靠性,并同時(shí)利用數(shù)學(xué)仿真與半實(shí)物仿真相結(jié)合的方法進(jìn)行性能評(píng)估[3]。
在導(dǎo)彈攻防仿真與評(píng)估領(lǐng)域,電子對(duì)抗環(huán)節(jié)效能評(píng)估的有效性是影響整個(gè)導(dǎo)彈攻防過(guò)程評(píng)估結(jié)果的關(guān)鍵[4]。隨著美國(guó)導(dǎo)彈防御系統(tǒng)的不斷發(fā)展,在基于網(wǎng)絡(luò)中心戰(zhàn)指導(dǎo)思想的影響下,雷達(dá)組網(wǎng)是美國(guó)導(dǎo)彈防御系統(tǒng)傳感器系統(tǒng)未來(lái)發(fā)展的方向。在雷達(dá)組網(wǎng)條件下,對(duì)中國(guó)作戰(zhàn)系統(tǒng)的有效性評(píng)估是需要重點(diǎn)關(guān)注的方面。通過(guò)建立基于雷達(dá)組網(wǎng)的射頻半實(shí)物試驗(yàn)系統(tǒng)與數(shù)學(xué)仿真系統(tǒng)的綜合集成的試驗(yàn)系統(tǒng),能夠?qū)崿F(xiàn)雷達(dá)組網(wǎng)條件下、導(dǎo)彈全攻防過(guò)程、參試電子干擾設(shè)備進(jìn)入回路的攻防對(duì)抗效能評(píng)估。在構(gòu)建射頻半實(shí)物與數(shù)學(xué)仿真綜合集成系統(tǒng)過(guò)程中,兩類(lèi)系統(tǒng)之間在時(shí)間、數(shù)據(jù)和結(jié)構(gòu)的差異性是集成所迫切需要解決的問(wèn)題[5]。
本文在射頻半實(shí)物仿真試驗(yàn)系統(tǒng)與數(shù)學(xué)仿真系統(tǒng)分析的基礎(chǔ)上,針對(duì)異構(gòu)系統(tǒng)集成面臨的數(shù)據(jù)問(wèn)題中的接口配置開(kāi)展了研究,設(shè)計(jì)了針對(duì)動(dòng)態(tài)數(shù)據(jù)關(guān)聯(lián)的接口配置技術(shù)算法,并基于該算法建立了接口配置流程。
1 基于反射內(nèi)存網(wǎng)的動(dòng)態(tài)數(shù)據(jù)關(guān)聯(lián)方法
1.1 反射內(nèi)存網(wǎng)數(shù)據(jù)交互方式
基于光纖反射內(nèi)存網(wǎng)的數(shù)據(jù)交互是通過(guò)網(wǎng)絡(luò)中共享內(nèi)存的地址進(jìn)行接口標(biāo)識(shí)的,當(dāng)系統(tǒng)內(nèi)部具有交互的模塊在明確兩者交互數(shù)據(jù)在反射內(nèi)存網(wǎng)中的地址之后,即可通過(guò)向確定地址寫(xiě)入數(shù)據(jù)和讀取數(shù)據(jù)實(shí)現(xiàn)數(shù)據(jù)交互,如圖1所示。
1.2 仿真系統(tǒng)內(nèi)部模塊之間數(shù)據(jù)關(guān)系
由于通過(guò)反射內(nèi)存網(wǎng)進(jìn)行數(shù)據(jù)交互是基于共享內(nèi)存中的地址進(jìn)行操作的,因此若要實(shí)現(xiàn)基于反射內(nèi)存網(wǎng)的動(dòng)態(tài)實(shí)時(shí)數(shù)據(jù)關(guān)聯(lián),需要系統(tǒng)內(nèi)部數(shù)據(jù)交互的模塊雙方能夠在系統(tǒng)動(dòng)態(tài)運(yùn)行過(guò)程中實(shí)時(shí)變更交互數(shù)據(jù)在光纖反射內(nèi)存網(wǎng)上的存放地址。從系統(tǒng)的角度出發(fā),一個(gè)集成仿真試驗(yàn)系統(tǒng)可以看成由多個(gè)模塊組成的集合系統(tǒng),系統(tǒng)內(nèi)部的模塊數(shù)據(jù)輸出端口、數(shù)據(jù)輸入端口和數(shù)據(jù)處理器組成如圖2所示。
系統(tǒng)內(nèi)部的動(dòng)態(tài)數(shù)據(jù)交互,可以表現(xiàn)為系統(tǒng)內(nèi)部模塊輸入/輸出端口之間的對(duì)應(yīng)關(guān)系下的各模塊端口之間的數(shù)據(jù)傳輸過(guò)程。由圖1可知,在基于光纖反射內(nèi)存網(wǎng)的集成系統(tǒng)中,端口之間的對(duì)應(yīng)關(guān)系通過(guò)光纖反射內(nèi)存網(wǎng)中的地址實(shí)現(xiàn)。集成仿真試驗(yàn)系統(tǒng)內(nèi)部各個(gè)模塊(用mi表示)的數(shù)據(jù)交互關(guān)系如圖3所示。

將系統(tǒng)中各子模塊的數(shù)據(jù)端口依照輸出、輸入屬性分為兩組:
系統(tǒng)內(nèi)部各個(gè)數(shù)據(jù)端口之間的映射關(guān)系如表1所示。
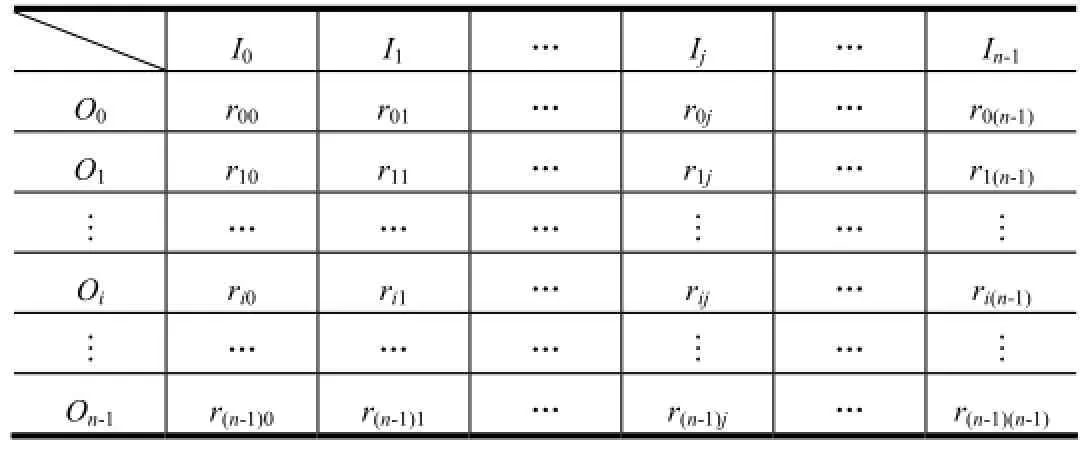
表1 系統(tǒng)內(nèi)部數(shù)據(jù)端口映射關(guān)系
表1中rij表示仿真系統(tǒng)中模塊mi,mj之間的輸入、輸出端口關(guān)聯(lián)關(guān)系,表1可由數(shù)據(jù)關(guān)系矩陣R表示:
集成系統(tǒng)內(nèi)部數(shù)據(jù)映射關(guān)系表示為
2 基于反射內(nèi)存網(wǎng)的動(dòng)態(tài)數(shù)據(jù)關(guān)聯(lián)方法
2.1 基于反射內(nèi)存網(wǎng)的數(shù)據(jù)接口地址解算
基于光纖反射內(nèi)存網(wǎng)的動(dòng)態(tài)數(shù)據(jù)交互需要面臨兩方面的問(wèn)題:a)系統(tǒng)模塊的數(shù)據(jù)接收端口從何處接收數(shù)據(jù);b)數(shù)據(jù)輸出端口將數(shù)據(jù)發(fā)往何。這兩方面的問(wèn)題可基于式(2)結(jié)合光纖反射內(nèi)存網(wǎng)共享內(nèi)存中交互數(shù)據(jù)存放地址的標(biāo)示實(shí)現(xiàn)系統(tǒng)內(nèi)部數(shù)據(jù)關(guān)系的動(dòng)態(tài)關(guān)聯(lián),具體關(guān)聯(lián)方法如下:
集成仿真試驗(yàn)系統(tǒng)中各模塊具有輸出數(shù)據(jù)端口在光纖反射內(nèi)存網(wǎng)中的數(shù)據(jù)存放地址分布如圖4所示。
將其中輸出端口對(duì)應(yīng)的在共享內(nèi)存上的地址構(gòu)建為端口地址序列:
輸入端口對(duì)應(yīng)的地址序列為:
數(shù)據(jù)端口的輸出數(shù)據(jù)的大小構(gòu)建為一個(gè)序列:
由式(5)~(7),結(jié)合式(4)中的數(shù)據(jù)關(guān)系矩陣,可以實(shí)現(xiàn)系統(tǒng)中各模型的輸入輸出端口之間的接口關(guān)聯(lián),如圖5所示。如圖5所示的接口關(guān)聯(lián),在確定集成仿真試驗(yàn)系統(tǒng)交互數(shù)據(jù)在反射內(nèi)存網(wǎng)上進(jìn)行數(shù)據(jù)交互的首地址addr0之后,即可依據(jù)端口輸出數(shù)據(jù)大小序列得到連續(xù)的端口數(shù)據(jù)地址分布序列Addout,計(jì)算過(guò)程如圖6所示。
在確定輸出端口數(shù)據(jù)地址分布序列Addout后,可以由集成仿真系統(tǒng)內(nèi)部各模塊之間的數(shù)據(jù)關(guān)聯(lián)關(guān)系表述,可由式(8)獲取集成仿真系統(tǒng)內(nèi)部各模塊的輸入端口的地址Addin,在動(dòng)態(tài)數(shù)據(jù)關(guān)聯(lián)過(guò)程中,通過(guò)數(shù)據(jù)關(guān)系矩陣可以實(shí)現(xiàn)集成仿真試驗(yàn)系統(tǒng)內(nèi)部各模塊輸入輸出端口在反射內(nèi)存網(wǎng)上的數(shù)據(jù)關(guān)聯(lián),通過(guò)動(dòng)態(tài)變更數(shù)據(jù)關(guān)系矩陣,由式(8)自主計(jì)算輸入端口的地址變化,實(shí)現(xiàn)系統(tǒng)內(nèi)部各模塊之間的動(dòng)態(tài)實(shí)時(shí)數(shù)據(jù)關(guān)聯(lián)。
2.2 集成仿真試驗(yàn)系統(tǒng)動(dòng)態(tài)實(shí)時(shí)數(shù)據(jù)關(guān)聯(lián)
集成仿真試驗(yàn)系統(tǒng)動(dòng)態(tài)實(shí)時(shí)數(shù)據(jù)關(guān)聯(lián),需要實(shí)現(xiàn)在系統(tǒng)運(yùn)行過(guò)程中,模型各個(gè)輸入端口實(shí)時(shí)變更數(shù)據(jù)輸入源,體現(xiàn)在反射內(nèi)存網(wǎng)上就是模塊輸入端口對(duì)應(yīng)的地址需要在運(yùn)行過(guò)程中由當(dāng)前地址變更為另外一個(gè)模型輸出端口的地址,進(jìn)而使得模塊對(duì)應(yīng)輸入數(shù)據(jù)發(fā)生變更。接口配置分為:接口關(guān)系變更申請(qǐng)、接口關(guān)系變更確認(rèn)和接口關(guān)系變更3個(gè)步驟。
a)接口關(guān)系變更申請(qǐng):在系統(tǒng)仿真過(guò)程中,接口關(guān)系變更需要在單幀數(shù)據(jù)傳輸完畢之后才能完成,否則容易導(dǎo)致幀數(shù)據(jù)在傳輸過(guò)程中出錯(cuò),因此需要向各子模塊提出變更申請(qǐng)。接口關(guān)系變更申請(qǐng)發(fā)起子模塊向其它模塊發(fā)送變更后的系統(tǒng)接口數(shù)據(jù)關(guān)聯(lián)關(guān)系矩陣。
b)接口關(guān)系變更確認(rèn):各子模塊在接受接口關(guān)系變更申請(qǐng)之后,首先判斷當(dāng)前幀數(shù)據(jù)是否傳輸完畢,然后依據(jù)接收到的新的接口數(shù)據(jù)關(guān)系舉證判斷變更后的接口端口的數(shù)據(jù)類(lèi)型標(biāo)識(shí)與對(duì)應(yīng)輸出端口的數(shù)據(jù)類(lèi)型標(biāo)識(shí)是否一致,一致則表明數(shù)據(jù)類(lèi)型一致,無(wú)數(shù)據(jù)異構(gòu)情況,可以接受新數(shù)據(jù)。最后向接口關(guān)系變更申請(qǐng)發(fā)送變更確認(rèn)信息。
c)接口關(guān)系變更:在各子模塊均完成接口關(guān)系變更確認(rèn)后,由申請(qǐng)方發(fā)送接口關(guān)系變更完成信息,全系統(tǒng)完成接口關(guān)系變更。
動(dòng)態(tài)接口配置是通過(guò)動(dòng)態(tài)變更系統(tǒng)內(nèi)部數(shù)據(jù)接口關(guān)系矩陣R實(shí)現(xiàn)的。數(shù)據(jù)關(guān)系變更方和申請(qǐng)方的工作流程如圖7、圖8所示。
3 配置技術(shù)的應(yīng)用
采用集成仿真試驗(yàn)系統(tǒng)可以通過(guò)構(gòu)建和變更數(shù)據(jù)關(guān)系矩陣實(shí)現(xiàn)對(duì)整個(gè)系統(tǒng)內(nèi)部的數(shù)據(jù)交互關(guān)系的實(shí)時(shí)動(dòng)態(tài)關(guān)聯(lián),而不需以文件或者數(shù)據(jù)庫(kù)形式進(jìn)行接口關(guān)系的描述,以避免采用文件或者數(shù)據(jù)庫(kù)形式帶來(lái)的非實(shí)時(shí)性。使得基于不同操作系統(tǒng)(VxWorks、Windows、RTX等)構(gòu)建的仿真、試驗(yàn)集成系統(tǒng),通過(guò)遍歷數(shù)據(jù)接口映射關(guān)系矩陣和端口數(shù)據(jù)表示矩陣即可自動(dòng)獲取內(nèi)部各子模塊的數(shù)據(jù)輸出到何處、接收來(lái)自何處的數(shù)據(jù),從而分析出整個(gè)系統(tǒng)的數(shù)據(jù)鏈路走向。
本文所述技術(shù)方法,在射頻半實(shí)物仿真試驗(yàn)系統(tǒng)與數(shù)學(xué)仿真系統(tǒng)的集成系統(tǒng)構(gòu)建中獲得了應(yīng)用,兩系統(tǒng)之間通過(guò)反射內(nèi)存網(wǎng)實(shí)現(xiàn)系統(tǒng)集成。數(shù)學(xué)仿真系統(tǒng)與射頻半實(shí)物仿真系統(tǒng)內(nèi)部各模塊之間的輸入、輸出之間的關(guān)聯(lián)關(guān)系可以通過(guò)數(shù)據(jù)關(guān)系配置界面自由配置,并在系統(tǒng)后臺(tái)自動(dòng)生成全系統(tǒng)的數(shù)據(jù)關(guān)系矩陣,為后續(xù)系統(tǒng)的地址分配計(jì)算提供參數(shù)。除通過(guò)界面進(jìn)行數(shù)據(jù)關(guān)系矩陣設(shè)定之后,還可以通過(guò)動(dòng)態(tài)實(shí)時(shí)數(shù)據(jù)關(guān)聯(lián)的3個(gè)步驟,由系統(tǒng)模塊依據(jù)運(yùn)行需求修改數(shù)據(jù)關(guān)系矩陣,實(shí)現(xiàn)數(shù)據(jù)關(guān)聯(lián)的動(dòng)態(tài)修改,內(nèi)部狀態(tài)如圖9和圖10所示。
4 結(jié) 論
本文基于光纖反射內(nèi)存網(wǎng),提出基于數(shù)據(jù)關(guān)系矩陣的動(dòng)態(tài)數(shù)據(jù)關(guān)聯(lián)方法,通過(guò)數(shù)據(jù)端口數(shù)據(jù)類(lèi)型標(biāo)識(shí)矩陣和數(shù)據(jù)接口映射關(guān)系矩陣將仿真、試驗(yàn)集成系統(tǒng)內(nèi)部各數(shù)據(jù)端口之間的關(guān)聯(lián)關(guān)系、數(shù)據(jù)端口對(duì)應(yīng)的物理傳輸介質(zhì)地址和數(shù)據(jù)端口的數(shù)據(jù)類(lèi)型一一對(duì)應(yīng)起來(lái),不需要通過(guò)復(fù)雜的數(shù)據(jù)庫(kù)管理技術(shù)即可實(shí)現(xiàn)對(duì)系統(tǒng)內(nèi)部各數(shù)據(jù)端口的管理,從而使系統(tǒng)內(nèi)部各個(gè)子模塊可以實(shí)時(shí)關(guān)聯(lián)各自的數(shù)據(jù)接口的關(guān)聯(lián)關(guān)系和數(shù)據(jù)端口的傳輸?shù)刂罚苊獠捎脭?shù)據(jù)庫(kù)管理技術(shù)帶來(lái)的非實(shí)時(shí)性。在射頻半實(shí)物試驗(yàn)系統(tǒng)與數(shù)學(xué)仿真系統(tǒng)的集成系統(tǒng)構(gòu)建應(yīng)用中,基于該方法的數(shù)據(jù)關(guān)系配置模塊運(yùn)行穩(wěn)定、高效,5 ms步長(zhǎng)條件下,能夠?qū)崟r(shí)運(yùn)行。
[1] 廖瑛, 馮向軍, 文援蘭, 等. 衛(wèi)星星座導(dǎo)航數(shù)學(xué)仿真系統(tǒng)及其關(guān)鍵技術(shù)研究[J]. 系統(tǒng)仿真學(xué)報(bào), 2008, 20(18): 4862-4866.
[2] 胡海霞, 涂俊峰, 曾海波, 等. 基于組態(tài)建模的航天器姿軌控?cái)?shù)學(xué)仿真系統(tǒng)[J]. 空間控制技術(shù)與應(yīng)用, 2011, 37(01): 11-15.
[3] 趙政, 呂級(jí)三, 劉佳琪, 王鹿受. 射頻仿真系統(tǒng)與數(shù)學(xué)仿真系統(tǒng)的集成架構(gòu)[J]. 導(dǎo)彈與航天運(yùn)載技術(shù), 2009(03): 43-49.
[4] 肖衛(wèi)國(guó), 爾聯(lián)潔. 雷達(dá)制導(dǎo)半實(shí)物仿真誤差分析[J]. 系統(tǒng)仿真學(xué)報(bào), 2007, 19(11): 2461-2463.
[5] 向龍, 丁建江, 呂金建. 雷達(dá)組網(wǎng)系統(tǒng)抗復(fù)合干擾效果動(dòng)態(tài)評(píng)估研究 [J].現(xiàn)代雷達(dá), 2010, 32(10): 22-24.
[6] 趙政, 劉佳琪. 集成仿真系統(tǒng)中時(shí)間一致性問(wèn)題分析[J]. 中國(guó)電子科學(xué)研究院學(xué)報(bào), 2010,5(02): 199-203.
Research of Integration System Interface Configuration Based on Reflect Memory Net
Liu Sheng-dong, Liu Jia-qi, Zhao Zheng, Yang Jin-peng, Wu Mei-xian
(Beijing Institute of Space Long March Vehicle, Beijing, 100076)
The primal problem of integration test simulation system is the different scheme in time, data and structure. To solve the problem of different data relationship, the interface configuration method is researched, based on data relation matrix, and the interface configuration process is established by the method. By using the method,the integration platform succeed realizes the interface dynamic configuration.
Reflect memory net; Integration simulation; Dynamic interface relation
TP333
A
1004-7182(2017)02-0087-04
10.7654/j.issn.1004-7182.20170219
2016-03-31;
2016-05-10
劉生東(1977-),男,博士,高級(jí)工程師,主要研究方向?yàn)轱w行器設(shè)計(jì)與效能評(píng)估以及圖像處理
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:30
當(dāng)代陜西(2021年17期)2021-11-06 03:21:36
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
當(dāng)代陜西(2019年15期)2019-09-02 01:52:00
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
學(xué)苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
