基于MATLAB對“Y型”果樹振動共振頻率的研究
2017-05-02 23:20:56魏庭鵬王春耀閔磊呂夢璐
江蘇農業科學 2017年3期
魏庭鵬++王春耀++閔磊++呂夢璐
摘要:為了研究果樹振動時樹干、樹枝的加速度動態響應,獲得最優共振頻率的階數、數值、區間,得出果樹振動的最優激振參數,為林果振動采摘收獲機的參數優化提供理論基礎,將樹干-樹枝力學模型簡化為雙自由度的質量-剛度-阻尼力學模型,建立振動方程,對方程進行仿真、運算,并結合試驗所得結果進行對比分析。結果顯示,仿真與試驗中,整個果樹共出現了6階共振頻率,其中1階、2階、3階最為明顯,分別約為1.72、4.18、7.72 Hz;同時,整個果樹的共振頻率始終都是在0~12、17~25 Hz這2個區間內。表明果樹振動落果過程中,0~12、17~25 Hz這2個頻率區間可作為整個果樹振動落果的參考頻率區間。其中,1.72、4.18、7.72 Hz可作為整個果樹振動落果的首選參考頻率;激振載荷數值增加,果樹共振頻率的階數、區間、數值并不會隨之改變,但樹干、樹枝的加速度響應幅值是逐漸增加的。
關鍵詞:果樹;動態響應;共振頻率;激振參數;采摘收獲機
中圖分類號: S225. 93文獻標志碼: A
文章編號:1002-1302(2017)03-0169-03
收稿日期:2015-09-06
基金項目:國家自然科學基金(編號:51465054)。
作者簡介:魏庭鵬(1990—),男,江蘇儀征人,碩士研究生,主要從事機械系統動力學研究。E-mail:weitingpeng100@126.com。
通信作者:王春耀,教授,碩士生導師,主要從事力學研究。E-mail:wangchun_yao@126.com。
林果產業作為新疆的特色性產業,創造了可觀的經濟效益,然而由于種植面積廣、采收周期短、勞動力緊缺等問題,常常使得林果采摘不及時,從而降低了產量,影響了果農的收入[1-2];與傳統的人工采摘方式相比,機械振動采摘方式具有效率高、成本低的顯著優勢。近年來,針對林果機械振動采摘的研究,國內外的眾多學者取得了一定的成果,如Torregrosa等研發了一種振搖樹干式杏子收獲機,并對其進行了試驗研究,結果表明當激振頻率為15 Hz時,收獲效率最高,達72%[3]。在國內,陳度等分別采用正弦式和沖擊式2種激振方式,對櫻桃進行了振動采收試驗,通過對比結果得出,樹枝在沖擊式激振下的動態響應要大于在正弦式激振下的動態響應[4]。王業成等通過振動采收試驗分析了激振頻率、振幅、激振位置對黑加侖葡萄落果率的影響,結果表明影響落果率的因素從大到小的順序依次為頻率、振幅、激振位置[5]。
針對果樹力學模型的建立,Láng做了一系列的研究,最終得出一些重要結論。他指出,首先果樹在振動時,樹干的運動與各分枝的運動是相互獨立的,即樹干在分叉處的上下部分具有良好的線性關系;其次,在只考慮果樹的結構阻尼,忽略黏性阻尼的前提下,將樹干-樹枝力學模型簡化為雙自由度的質量-剛度-阻尼力學模型時,較為準確[6-8]。然而,針對建立的模型,Láng并未對其進行進一步的探究,在其建立的力學模型基礎上,本試驗進一步研究振動時樹干、樹枝的加速度動態響應,獲得最優共振頻率的階數、數值、區間,并且通過試驗驗證,最終得出果樹振動的最優激振參數,為林果振動采摘收獲機的參數優化提供參考。
1樹干-樹枝的建模與仿真
1.1建立樹干-樹枝模型
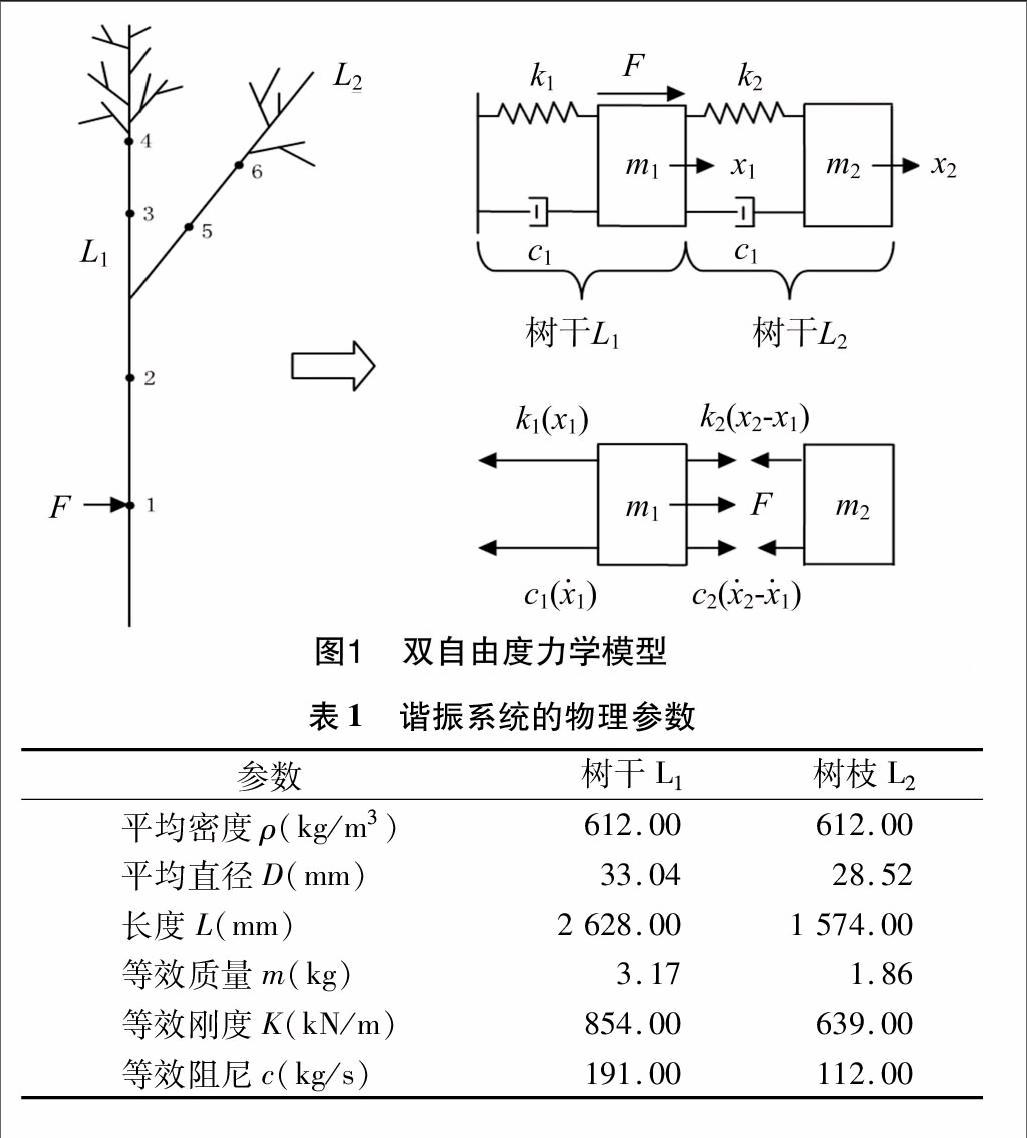
選取生物形態較規則、分枝與樹干盡量在同一平面內的“Y型”海棠果樹樹枝作為研究對象,針對Láng提出的力學模型,如圖1所示,[JP2]忽略樹干、樹枝末端少量的嫩枝、嫩葉的重力,將樹干、樹枝各自等效為1個集中質量塊,之間視為以彈簧件、阻尼器彈性連接。因此,在振動過程中,樹枝L2對樹干L1[JP2]的作用,可以看作質量塊m2在彈簧件k2和阻尼器c2作用下的諧振系統對質量塊m1的作用,取點1、2、3、4、5、6作為試驗的監測點,其中,在距離固定端部0.5 m處取點1,分別依次施加5、7、9 g的激振載荷,諧振系統相關的物理參數如表1所示。
1.2仿真運算
依據建立的雙自由度力學模型,物體離開平衡位置的位移用x1、x2表示,2個質量塊在水平方向的受力如圖1中所示,依據力的平衡條件并加以整理得公式(1):
[JZ(][JB({]m1[KG-*5]x[DD(-1*2][HT6]¨[DD)]1+(c1+c2)[KG-*5]x[DD(-1*2][HT6][DD)]1-c2[KG-*5]x[DD(-1*2][HT6][DD)]2+(k1+k2)x1-k2x2=Fm2[KG-*5]x[DD(-1*2][HT6]¨[DD)]2-c2[KG-*5]x[DD(-1*2][HT6][DD)]1+c2[KG-*5]x[DD(-1*2][HT6][DD)]2-k2x1+k2x2=0[JB)]。[JZ)][JY](1)
將公式(1)寫成矩陣形式見公式(2):
[HT9.,8.][JP3][JB((]m100m2[JB))][JB((][KG-*5]x[DD(-1*2][HT6]¨[DD)]1[KG-*5]x[DD(-1*2][HT6]¨[DD)]2[JB))]+[JB((]c1+c2-c2-c2c2[JB))][JB((][KG-*5]x[DD(-1*2][HT6][DD)]1[KG-*5]x[DD(-1*2][HT6][DD)]2[JB))]+[JB((]k1+k2-k2-k2k2[JB))][JB((]x1x2[JB))]=[JB((]F0[JB))][JP]。[JY](2)
最終可得雙自由度系統的運動微分方程[9-11],見公式(3):
[JZ(][KG-*5][WTHX][STHX]M[DD(-*2][HT6]→[DD)][KG*5]x[DD(-1*2][HT6]¨[DD)]+[KG-*5][WTHX][STHX]C[DD(-*2][HT6]→[DD)][KG-*5]x[DD(-1*2][HT6][DD)]+[KG-*5][WTHX][STHX]K[DD(-*2][HT6]→[DD)]x=[KG-*5][WTHX][STHX]f[DD(-*2][HT6]→[DD)][JZ)][JY](3)
這是一個二階常系數線性非其次微分方程組,式中:
[JZ][WTHX][STHX]M[DD(-*2][HT6]→[DD)]=[JB((]m100m2[JB))],[KG-*5][WTHX][STHX]C[DD(-*2][HT6]→[DD)]=[JB((]c1+c2-c2-c2c2[JB))]
[JZ(][KG-*5][WTHX][STHX]K[DD(-*2][HT6]→[DD)]=[JB((]k1+k2-k2-k2k2[JB))],[KG-*5]f[DD(-*2][HT6]→[DD)]=[JB((]F0[JB))]。[JZ)][JY](4)
分別為系統的質量矩陣、阻尼矩陣、剛度矩陣和外部載荷矩陣。
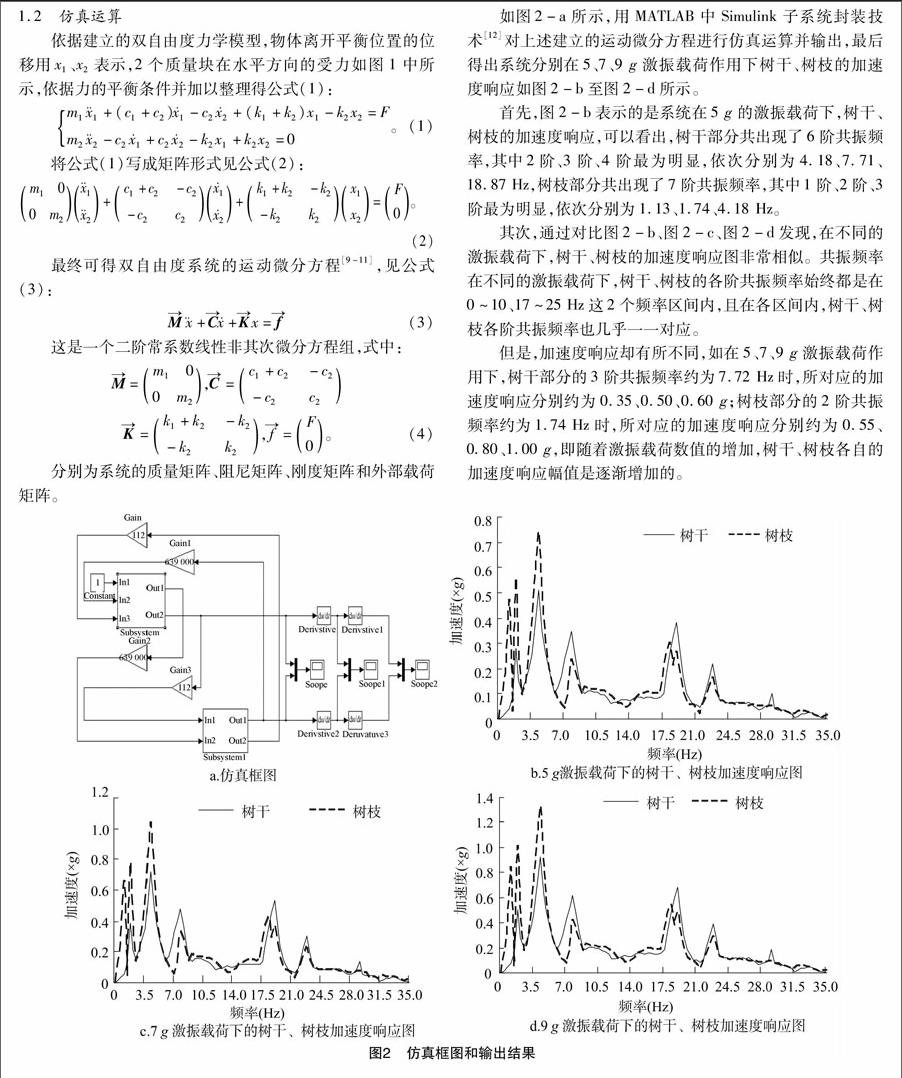
如圖2-a所示,用MATLAB中Simulink子系統封裝技術[12]對上述建立的運動微分方程進行仿真運算并輸出,最后得出系統分別在5、7、9 g激振載荷作用下樹干、樹枝的加速度響應如圖2-b至圖2-d所示。
首先,圖2-b表示的是系統在5 g的激振載荷下,樹干、樹枝的加速度響應,可以看出,樹干部分共出現了6階共振頻率,其中2階、3階、4階最為明顯,依次分別為4.18、7.71、18.87 Hz,樹枝部分共出現了7階共振頻率,其中1階、2階、3階最為明顯,依次分別為1.13、1.74、4.18 Hz。
其次,通過對比圖2-b、圖2-c、圖2-d發現,在不同的激振載荷下,樹干、樹枝的加速度響應圖非常相似。共振頻率在不同的激振載荷下,樹干、樹枝的各階共振頻率始終都是在0~10、17~25 Hz這2個頻率區間內,且在各區間內,樹干、樹枝各階共振頻率也幾乎一一對應。
但是,加速度響應卻有所不同,如在5、7、9 g激振載荷作用下,樹干部分的3階共振頻率約為7.72 Hz時,所對應的加速度響應分別約為0.35、0.50、0.60 g;樹枝部分的2階共振頻率約為1.74 Hz時,所對應的加速度響應分別約為0.55、080、1.00 g,即隨著激振載荷數值的增加,樹干、樹枝各自的加速度響應幅值是逐漸增加的。[FL)]
[FK(W+112mm][TPWTP2.tif][FK)]
2材料與方法
2.1試驗儀器
激振器:采用蘇州蘇試試驗儀器股份有限公司生產的電動振動試驗臺,振動試驗臺型號為DC-600-6,支持最大負載200 kg,額定位移 51 mm。信號采集:采用東華測試生產的采集儀及其配套的軟件,采集儀型號為DH5922N,可同時進行16通道同步高速長時間連續采樣,每個通道最高采樣頻率為256 kHz,本次試驗采樣頻率為500 Hz。
2.2試驗過程
提取1、2、3、4、5、6這6個監測點作為試驗的監測點,將加速度傳感器按編號1~6分別安置在6個監測點處,在點1處,分別依次施加5、7、9 g的激振載荷,應用采集儀同時對6個監測點進行監控并拾取響應。
2.3試驗結果
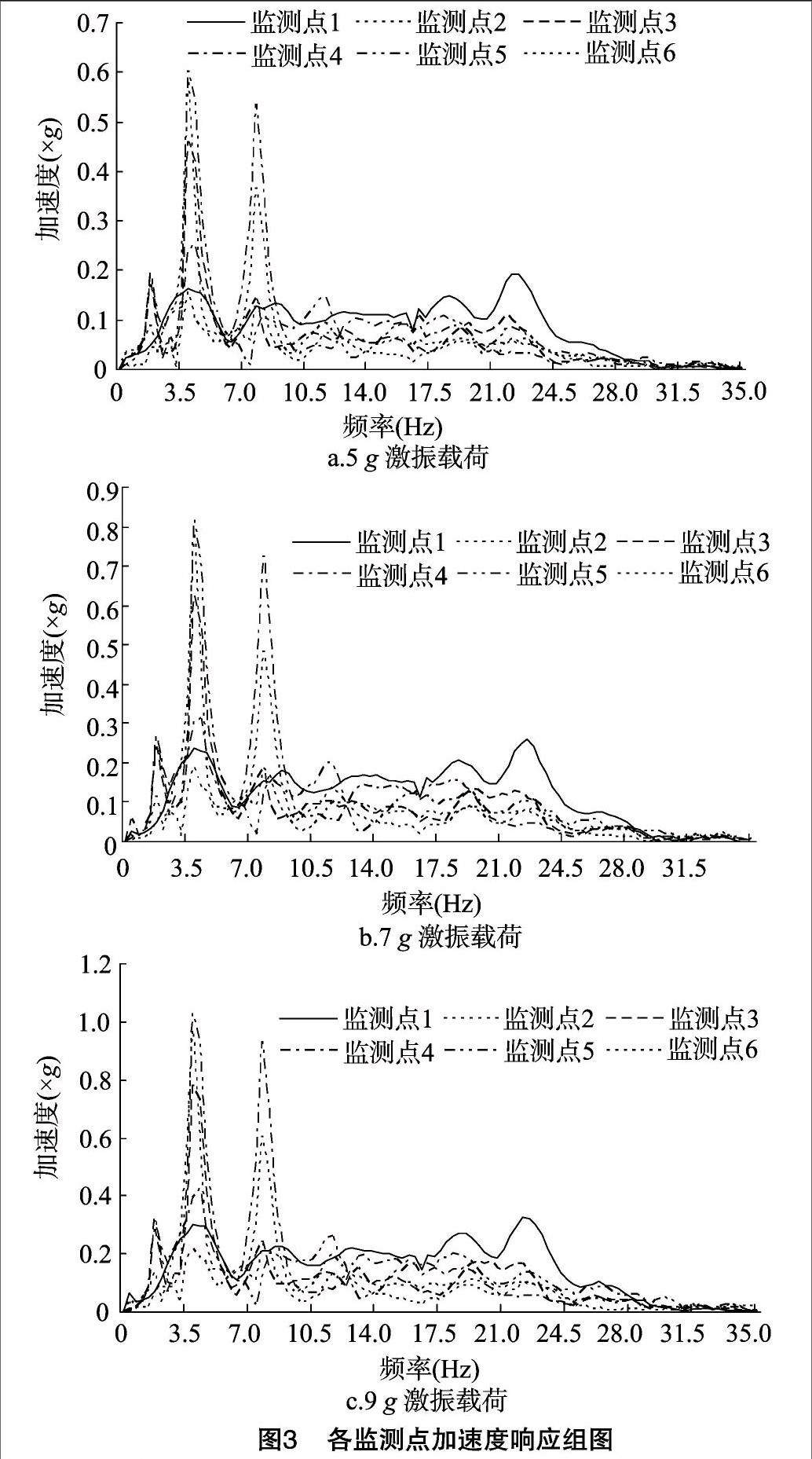
圖3-a、圖3-b、圖3-c分別表示的是系統在5、7、9 g激振載荷作用下的樹干、樹枝上各監測點的加速度響應圖。
通過對比圖3-a、圖3-b、圖3-c發現,在不同的激振載荷作用下,樹干、樹枝上各監測點的加速度響應圖也非常相似,這與前面仿真運算的結果可能存在一定的共性,因此,將仿真與試驗中的各階共振頻率一并列在表2中,將仿真與試驗所得的結果進行對比分析。
首先,從圖3-a、圖3-b、圖3-c中可以看出,試驗中整個果樹約共出現了6階共振頻率,其中2階、3階最為明顯,分別約為3.94、7.72 Hz。這與仿真中,樹干、樹枝部分分別共出現了6階、7階共振頻率,樹干中2階、3階、4階最為明顯,依次分別為4.18、7.71、18.87 Hz,樹枝中1階、2階、3階最為明顯,依次分別為1.13、1.74、4.18 Hz所得的結果,無論是共振頻率的階數,還是共振頻率的數值都較吻合。共振頻率對應的加速度響應越強烈,越有利于振動過程中果實的脫落,因此,上述的幾個共振頻率,可以作為整個果樹振動落果的首選參考頻率。
由表2可知,共振頻率在不同的激振載荷下,樹干、樹枝上各監測點的各階共振頻率始終都是在0~12、18~23 Hz這2個頻率區間,且在各區間內,各階共振頻率也幾乎一一對應。這與仿真中,樹干、樹枝的各階共振頻率始終都是在0~10、17~25 Hz這2個頻率區間內,且在各區間內,樹干、樹枝各階共振頻率也幾乎一一對應所得的結果,無論是頻率區間,還是共振頻率的對應關系都較吻合。說明激振載荷數值的增加,并不會改變果樹共振頻率的階數、區間、數值,同時0~12、17~25 Hz這2個頻率區間,可以作為整個果樹振動落果的參考頻率區間。
試驗中整個果樹在5、7、9 g的激振載荷作用下,樹干上監測點4的3階共振頻率約為7.68 Hz時所對應的加速度響應分別約為0.55、0.70、0.95 g,樹枝上監測點5的2階共振頻[CM(25]率約為3.94[KG*3]Hz時所對應的加速度響應分別約為0.60、080、1.00 g。這與仿真中,隨著激振載荷數值的增加,樹干、樹枝各自的加速度響應幅值是逐漸增加的相吻合。當果樹振動時的慣性力大于果實-果柄的結合力時,果實脫落,而慣性力主要取決于枝干上的加速度響應,因此,振動落果作業中,應綜合考慮樹干、各樹枝上果實的生長情況,選擇最適宜的激振載荷,以達到最大采摘效率。
仿真和試驗所得的結果中,諸如共振頻率的階數、數值、區間以及共振頻率所對應的加速度響應幅值,都存在微小的差異,這主要由于建立的模型不是很精確,比如忽略樹干、樹枝末端少量的嫩枝、嫩葉的重力,忽略空氣阻尼在仿真中的影
[FL)]
[KH*4D]
響,以及果樹分叉節點、枝干各處的材料形狀不一、物理特性不均勻等,都造成了理論模型的不精確性,從而造成了仿真與實際試驗的諸多差異。
3結論
[JP2]果樹振動落果過程中,0~12、17~25 Hz這2個頻率區間,可以作為整個果樹振動落果的參考頻率區間。其中,1.72、418、7.72 Hz可以作為整個果樹振動落果的首選參考頻率。
激振載荷數值的增加,果樹共振頻率的階數、區間、數值并不會隨之改變,但樹干、樹枝的加速度響應幅值是逐漸增加的。[JP]
樹干、樹枝末端少量的嫩枝、嫩葉的重力、空氣阻尼以及枝干材料物理特性不均勻等因素,對理論模型精度均有一定的影響,不容忽略。
參考文獻:
[1]Sarig Y. Mechanized fruit harvesting:Site specific solutions. Information and technology for sustainable fruit and vegetable production FRUTIC 05[C]. Montpellier,France,2005:237-247.
[2]王長勤,許林云,周宏平. 偏心式林果振動采收機的研制與試驗[J]. 農業工程學報,2012,28(16):10-16.
[3]Torregrosa A,Martin B,Ortiz C,et al. Mechanical harvesting of processed apricots[J]. Applied Engineering in Agriculture,2006,22(4):499-506.[HJ1.7mm]
[4]陳度,杜小強,王書茂. 振動式果品收獲技術機理分析及研究進展[J]. 農業工程學報,2011,27(8):195-200.
[5]王業成,陳海濤,林青. 黑加侖采收裝置參數的優化[J]. 農業工程學報,2009,25(3):79-83.
[6]Láng Z. A fruit tree stability model for static and dynamic loading[J]. Biosystems Engineering,2003,85 (4):461-466.
[7]Láng Z. A simple model for fruit tree shaking harvest[J]. [JP2]International Journal of Horticultural Science,2007,13(1):33-36.[JP]
[8]Láng Z. A one degree of freedom damped fruit tree model[J]. Transactions of the ASABE,2008,51(3):823-829.
[9]李惠斌. 振動理論與工程應用[M]. 北京:北京理工大學出版社,2006:28-45.
[10]殷祥超. 振動理論與測試技術[M]. 徐州:中國礦業大學出版社,2007:30-43.
[11]李德葆. 工程振動試驗分析[M]. 北京:清華大學出版社,2004:23-39.
[12]黎明安. MATLAB/Simulink動力學系統建模與仿真[M]. 北京:國防工業出版社,2012:27-36.