新型航天電機去耦冗余結構設計探討
2017-05-02 07:35:44張洪巖寧劍建宋振民于慧敏
微特電機 2017年5期
李 雨,張洪巖,寧劍建,宋振民,于慧敏
(中國電子科技集團公司第二十一研究所,上海 200233)
0 引 言
為確保航天飛行任務的成功,航天器平臺及有效載荷均要進行可靠性設計。電機作為平臺及有效載荷執行機構的關鍵元件,一旦失效將直接影響整機功能的實現,因此針對電機本身及其控制系統的可靠性設計就顯得尤為重要,需要對電機及驅動器進行冗余設計。設計方法有2種,一種是采用2套單繞組電機及雙驅動器方式,該設計使得系統重量顯著增加;另一種方法是采用一套雙繞組電機及雙驅動器的冗余形式,雙繞組電機設計如圖1所示。
A-a為A相主繞組,A′-a′為A相備份繞組
由圖1可知,因主備份繞組共用磁路,當主份繞組通過電流時,備份繞組則與之直接耦合,在備份繞組上的感應電勢如下:
式中:M為電機主、備繞組互感;為電機主繞組電流。感應電勢由2部分組成:前一部分為互感變壓器電勢,后一部分為運動電勢。當主繞組工作時,備份繞組上產生的變壓器電勢將對備份驅動器產生沖擊,嚴重時可擊穿備份驅動器功率器件,降低了備份驅動器可靠性。目前解決辦法是在備份繞組和備份驅動器之間加繼電器斷開,但是帶來系統重量增加的問題。本文通過研究一種新型冗余結構設計,即去耦冗余結構設計,將主備份繞組之間的耦合電勢消除,使其能夠不通過繼電器直接與備份驅動器連接。本文以航天步進電動機為例進行闡述,但不局限于步進電動機,其設計理念可引申到其它航天電機的冗余結構設計。
1 國外冗余設計結構
俄羅斯采用機械備份的方法,即用2個獨立的電機軸系串聯起來,如圖2所示。這種冗余形式的優、缺點如表1所示。

圖2 俄羅斯主、備份電機串聯
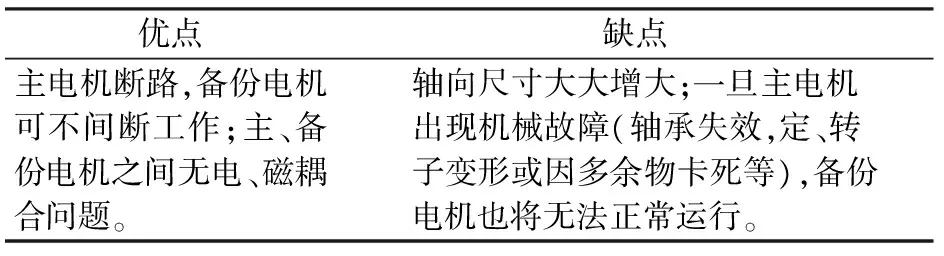
優點缺點主電機斷路,備份電機可不間斷工作;主、備份電機之間無電、磁耦合問題。 軸向尺寸大大增大;一旦主電機出現機械故障(軸承失效,定、轉子變形或因多余物卡死等),備份電機也將無法正常運行。
美國采用2種冗余形式:一種如圖3所示,主、備份2套繞組同時繞在一個鐵心上。這種冗余形式的優、缺點如表2所示。我國航天步進電動機普遍采用這種冗余形式。

(a) 主、備份繞組繞在同一鐵心上

(b) 繞組接線示意圖

表2 美國冗余形式的優、缺點
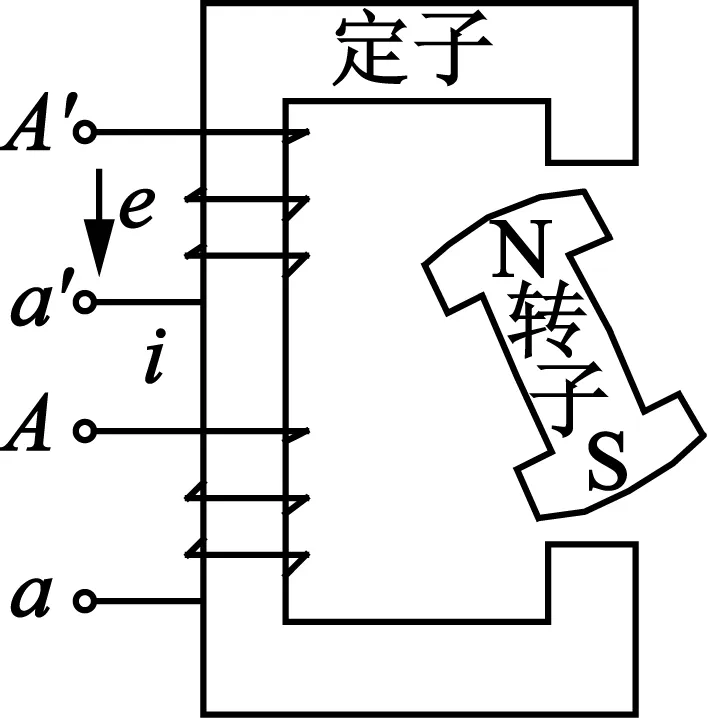
另一種是Schaeffer公司提出的一種主、備份繞組鐵心隔離的冗余形式,原理圖如圖4所示。這種冗余形式的優、缺點如表3所示。

(a) 備份原理示意圖

(b) 繞組備份形式示意圖

優點缺點主份繞組斷路,備份繞組可以不間斷的替代工作;主、備繞組之間無直接電、磁耦合問題。 電機鐵心一半工作,空間不對稱,會形成單邊磁拉力,產生振動、噪聲等;定子一分為二,空間利用率低,結構強度差。
圖4中,A-a為A相主繞組,B-b為B相主繞組,A′-a′為A相備份繞組,B′-b′為B相備份繞組。
2 去耦冗余設計結構
本去耦冗余結構設計,首先在繞組備份方式上進行創新,具體設計如圖5所示。這種結構使主、備份繞組不共磁極,且既可以解決電機主繞組局部溫
(a)
(b)
升過高導致備份繞組斷路問題,又沒有主、備份繞組直接耦合的感應電勢問題,明顯地提高了電機的可靠性。與美國Schaeffer公司的冗余設計形式相比,本冗余結構電機的電磁力徑向對稱,電機運行平穩。在電機沖片槽形不變(槽面積S)的情況下,該設計使得電機運行時同時作用的極數減半,但通過繞組參數調整,可確保電機力矩。傳統步進電動機和本結構繞組設計參數對比如表4所示。

表4 傳統步進電動機和本去耦冗余設計參數對比
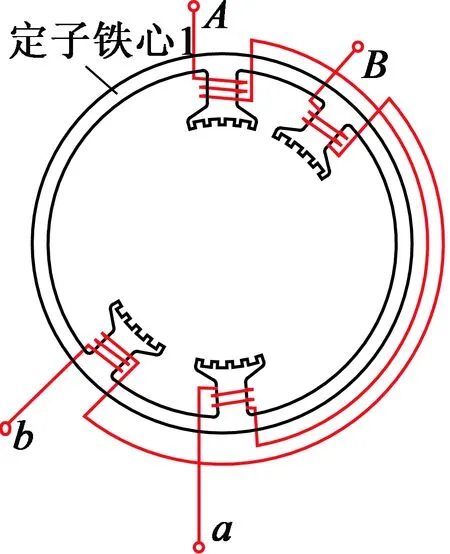
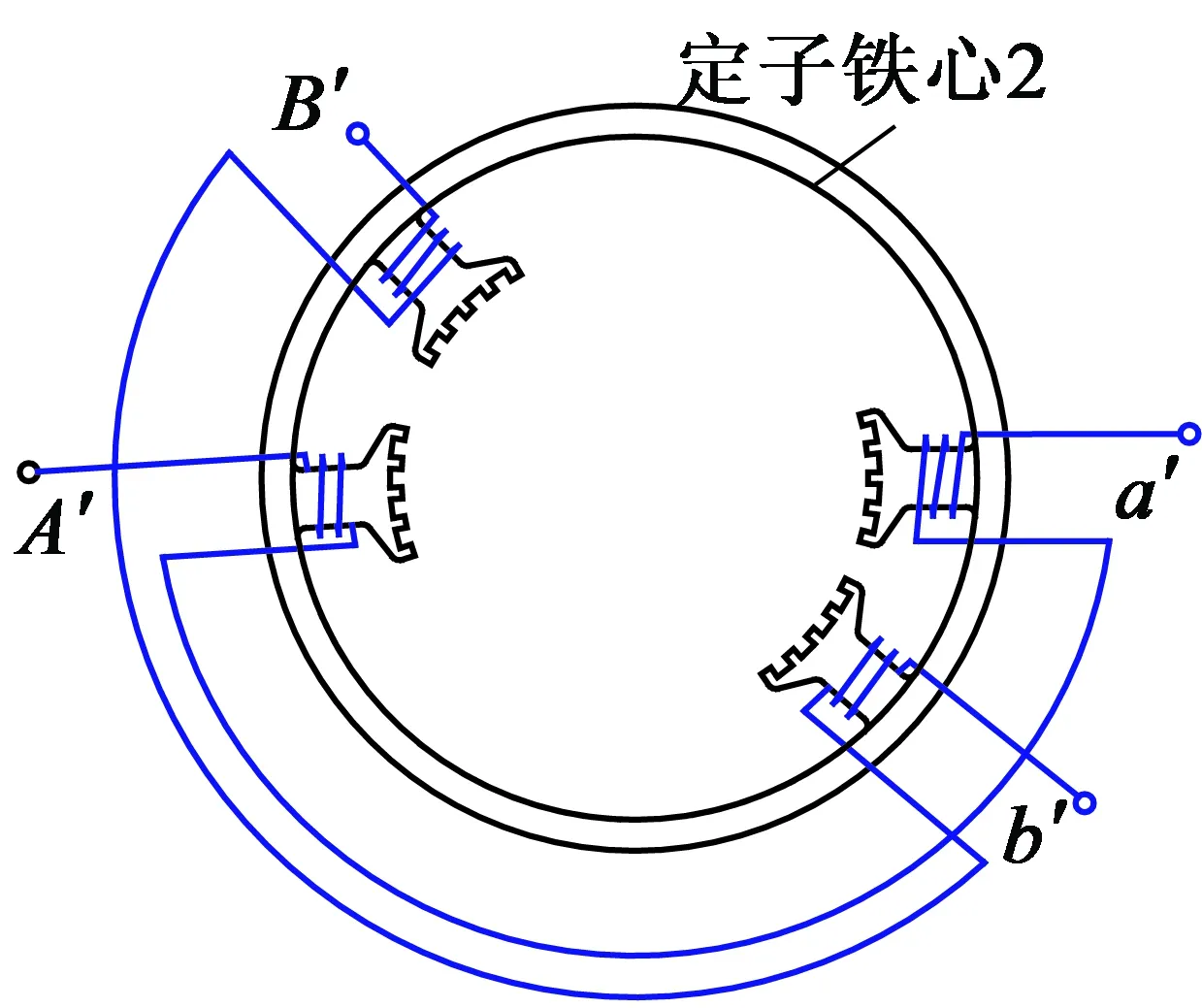
其次,本去耦冗余結構的定子鐵心不同于傳統步進電動機,它由兩段定子鐵心拼接而成,如圖6所示。兩鐵心之間采用隔磁片,實現了主備份繞組磁路完全物理隔離。

(a) 定子鐵心1

(b)定子鐵心2

(c)兩段定子鐵心拼接示意圖

(d)電機結構圖
3 試驗結果及分析
通過上述繞組冗余設計和定子鐵心結構設計,消除了電機主備份繞組的直接磁耦合,提高了控制可靠性。樣機耦合度的測試是按照主繞組通電運行,通過測試備份繞組感應電勢計算所得。由于樣機消除了備份繞組產生的變壓器電勢,其耦合度實為電機旋轉產生的運動電勢計算結果。研制樣機性能測試數據如表5所示,可滿足工程實際需要。

表5 去耦冗余結構樣機性能參數
4 結 語
該去耦冗余結構與傳統冗余結構相比,在電機功耗、體積均不增加的情況下,輸出力矩相當,重量沒有顯著增加。但通過該新型去耦冗余結構的繞組設計和定子鐵心設計,消除了主備份繞組的磁路耦合,降低了電機主繞組工作時,備份繞組產生的感應電勢,提高了航天電機自身及驅動器的可靠性;同時,該結構無需采用繼電器斷開備份繞組與驅動器的連接,從而減輕了系統重量,具有工程實用價值。
[1] 王宗培,孔昌平.步進電動機及其控制系統(增量運動控制之二)[M].哈爾濱:哈爾濱工業大學出版社,1984.
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年13期)2021-07-28 07:15:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
專用汽車(2016年5期)2016-03-01 04:14:49
中國房地產業(2016年2期)2016-03-01 01:25:23
