高超聲速飛行器自適應神經網絡控制
2017-05-03 01:32:43趙賀偉胡云安楊秀霞
固體火箭技術 2017年2期
趙賀偉,胡云安,梁 勇,楊秀霞
(海軍航空工程學院 控制工程系,煙臺 264001)
高超聲速飛行器自適應神經網絡控制
趙賀偉,胡云安,梁 勇,楊秀霞
(海軍航空工程學院 控制工程系,煙臺 264001)
針對一類高超聲速飛行器,在充分考慮其非線性模型包含未建模動態、氣動參數變化、彈性形變等產生的未知非線性不確定函數以及外界擾動的情況下,設計了一種基于自適應神經網絡的非線性逆控制器。首先,將系統的動態特性分為標稱部分和不確定部分,采用非線性逆的思想設計標稱部分的控制器,利用神經網絡逼近不確定部分,將神經網絡的最優權值采用自適應律進行調節,提高神經網絡的在線逼近能力。利用改進的變結構控制來消除神經網絡逼近誤差的影響,最終使跟蹤誤差收斂為零,并保證閉環系統的信號有界。通過仿真驗證了設計方法的正確性。
高超聲速飛行器;自適應;神經網絡;變結構控制
0 引言
高超聲速飛行器是一種高速機動武器,在搜索信息、快速打擊、大跨度預警等方面具有廣泛的應用價值,一直是各國關注和研究的熱點領域。高超聲速飛行器的飛行跨度大,環境變化劇烈,氣動參數的變化和外界干擾都不可避免,這些因素導致高超聲速飛行器具有高度非線性、強耦合和不確定性,精確的動力學模型難以獲得,這給控制器的設計帶來了極大的困難和挑戰。
對于高超聲速飛行器控制器的設計方法,目前已有大量學者進行了研究,如文獻[1]采用了基于H∞的方法設計了控制器,文獻[2]采用了結構動力學的方法,設計了一種線性變參數控制器,上述2種方法都是基于線性模型進行的控制器設計,而線性模型難以全面刻畫高超聲速飛行器的動態力學行為;文獻[3]設計了一種自適應控制器,文獻[4]利用了觀測器技術,設計了基于觀測器的反饋控制器,文獻[5]采用了一種模型跟蹤控制方法設計了控制器,這3種方法都沒有充分考慮模型的不確定性問題;文獻[6-8]利用魯棒非線性方法設計了控制器,但這些文獻的研究對象是高超聲速飛行器的縱向運動模型,而對于飛行器的橫側向運動沒有進行研究;文獻[9-10]將自適應控制與神經網絡進行結合,設計自適應神經網絡控制器,但神經網絡逼近誤差的處理不是很理想,這會影響系統的跟蹤效果;文獻[11]針對X-38高超飛行器的姿態控制,利用模糊邏輯方法設計了控制器,實現了姿態控制;文獻[12]針對一種高超飛行器系統中存在的不確定性和外界擾動設計了一種魯棒控制器,很好地實現了飛行器的姿態控制;文獻[13]采用反演設計的思想,設計了基于反演的高超聲速飛行器自適應滑模控制器,解決了模型中存在的不確定性問題,但外界擾動帶來的影響沒有加以考慮;文獻[14]針對一種乘波體外形的高超飛行器,將系統在平衡點附近進行泰勒線性化,針對線性化后的模型,采用自適應線性二次型方法,實現鎮定控制,但該方法具有較大的局限性,線性化后的模型不能夠精確描述高超聲速飛行器的全面動態特性;文獻[15]采用自適應滑模控制方法,實現了一種外形為軸對稱體的高超聲速飛行器鎮定控制,該方法的缺陷是不能解決非匹配不確定性問題。
本文主要采用非線性逆的思想來設計主體控制器,以保證閉環系統的全局穩定。利用神經網絡來逼近因參數變化或建模誤差引起的模型不確定部分,利用自適應調節律來調節神經網絡的最優權值,提高神經網絡的在線逼近能力。神經網絡的逼近誤差則由變結構控制策略來消除,并對變結構控制律進行改進,以削弱變結構控制產生的顫振帶來的影響。
1 高超聲速飛行器非線性模型
本文采用NASA蘭利實驗室高超聲速飛行器Winged-Cone的非線性六自由度數學模型[16],飛行器的結構布局及尺寸如圖1所示。
具體數學模型如下:
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
其中
D=qSCD,L=qSCL,Y=qSCY
MlA=qbSCl,MmA=mmrc-xcgZ
MnA=nmrc+xcgY,nmrc=qbSCn
mmrc=qcSCm,Z=-Dsinα-Lcosα
CD=CD,α+CD,δeδe+CD,δaδa+CD,δrδr
CY=CY,ββ+Cy,δeδe+CY,δaδa+CY,δrδr
CL=CL,α+CL,δeδe+CL,δeδe
Cl=Cl,ββ+Cl,δeδe+Cl,δaδa+Cl,δrδr+
Cn=Cn,ββ+Cn,δeδe+Cn,δaδa+Cn,δrδr+
Cm=Cm,α+Cm,δeδe+Cm,δaδa+
式中v為飛行速度;γ為航跡傾斜角;χ為航跡方位角;α、β、μ分別為迎角、側滑角和速度滾轉角;p、q、r分別為滾轉角速率、俯仰角速率和偏轉角速率;D、Y、L分別為阻力、側力和升力;T為推力;Tx、Ty、Tz分別為推力在體坐標系上的分量;H為飛行高度;Ip、Iq、Ir分別為轉動慣量;xcg為質心到參考力矩中心的距離;MlA、MmA、mnA為空氣動力矩在體坐標系中的分解;CD、CY、CL分別為阻力、側力和升力系數;δe、δa、δr分別為左、右升降副翼和方向舵偏轉角;其余符號說明請參考文獻[16]。
根據上述數學模型進行整理,可得
(10)
(11)
y=x1
(12)
式中x1、x2為狀態量,x1=[αβμ]T,x2=[pqr]T;u為控制輸入,u=[δeδaδr]T;y=x1為系統輸出;f1、g1、f2、g2為非線性未知函數,f1(x1)∈R3、g1(x1)∈R3×3、f2(x1,x2)∈R3、g2(x1)∈R3×3;相關狀態量、符號說明以及函數表達式詳見文獻[17-18]。
將非線性模型改寫為如下形式:
(13)
其中
x=[x1,x2]T∈R6
F(x1,x2,t)=[f1f2]T∈R6
U=[1uT]T∈R4
式中x、f(x1,x2,t)、g(x1,t)、U為系統非線性未知函數[19];d(t)為未知的外界干擾,d(t) ∈R6。
控制器設計的目的是使系統的狀態x(t)能夠跟蹤期望的狀態軌跡xd(t)。
2 控制器設計

假設2 系統期望的狀態軌跡xd(t)是連續的已知函數,且有界。
2.1 非線性逆控制器設計
定義跟蹤誤差e(t)=x(t)-xd(t),如果系統的動態全部精確已知,并將外界干擾忽略,那么可設計非線性逆控制律如下形式:
(14)
其中,k為控制系數,將式(14)代入式(13)中,得
(15)
合理選擇控制參數k,系統跟蹤誤差及其微分誤差可趨于0,系統全局穩定。但高超聲速飛行器的動態不能夠精確獲得。因此,系統的未建模動態和外界擾動是不能夠忽略的。將F(x1,x2,t)、G(x1,t)分為標稱部分、和不確定部分,即有如下關系式[20]
F(x1,x2,t)=F0(x1,x2,t)+ΔF(x1,x2,t)
(16)
G(x1,t)=G0(x1,t)+ΔG(x1,t)
(17)
2.2 基于自適應神經網絡的輸出反饋控制器
對系統的標稱部分采用非線性逆的思想設計控制器,利用自適應神經網絡來逼近不確定部分[21]。則可將實際控制輸入寫為如下形式:
U=u0(t)+ub(t)
(18)
其中,u0(t)為非線性逆控制器,形式為
(19)
將式(18)、式(19)代入式(13),可得
(20)
利用式(15)的結果可將式(20)改寫為
(21)
其中,η(x1,x2,U(t))為模型不確定部分,即
η(x1,x2,U(t))=ΔF(x1,x2,t)+ΔG(x1,t)U
(22)
將跟蹤誤差重定義為如下形式:
z(t)=[0,eT(t)]T
(23)
將上式求微分后,可寫成如下形式:
B[η(x1,x2,U(t))+G0(x1,t)ub+d(t)]
(24)
其中
(25)
式(18)中的ub(t)設計為如下形式
ub(t)=G0-1(x,t)[un(t)+ul(t)]
(26)
式中un(t)為神經網絡逼近器;ul(t)為魯棒控制項,消除神經網絡逼近誤差影響[22]。
將狀態變量x1、x2和延遲控制信號U(t-1)作為模型未知不確定項η的輸入信號:
η(x1,x2,U(t-1))=W*TΦ(·)+ε[z(t),U(t-1)]
(27)
式中W*為最優權重矩陣;ε(z(t),U(t-1))為神經網絡的重構誤差;Φ(·)為高斯基函數向量。
假設3 為不失一般性,假設存在ξ(x)>0,使得‖ε(x)‖≤ξ(x)。
設計神經網絡逼近器[23]為
(28)
將式(26)~式(28)代入到式(24),可得
(29)
根據假設3可知,神經網絡的逼近誤差是有界的,且有‖ε[z(t),U(t-1)]‖≤ξ[z(t),U(t-1)]。
借鑒文獻[24]的方法,假設存在矩陣P=PT>0,使得下面的近似黎卡提方程成立。
(30)
Q=QT>0是設定好的權重矩陣,R為正的增益矩陣,ζ為設定的常值。設計神經網絡最優權重矩陣的自適應調節律為
(31)
式中Θ為自適應調節參數。
ul(t)設計為
ul(t)=um(t)+up(t)
(32)
其中,um(t)設計為
um(t)=ξ[z(t),U(t-1)]sgn[BTPz(t)]
(33)
推論1um(t)采用變結構控制方法,符號函數為非連續函數,導致顫振現象,會對高超聲速飛行器的作動器帶來較大損害。因此,對變結構控制進行改進,設計為如下形式[24]:
(34)
其中,τ、σ為正的常數,且有
(35)
將up(t)設計為
up(t)=-R-1BTPz(t)
(36)
定理1 在滿足假設1~3的情況下,系統式(13)在控制律式(18)、(19)、(26)、(28)、(32)、(34)、(36)的作用下,在自適應律式(31)調節下,能夠保證跟蹤誤差在有限時間內收斂到0,且閉環系統的所有信號都是有界的。
穩定性證明:選擇一個lyapunov函數為如下形式:
(37)
對上式lyapunov函數進行微分,并將式(29)、式(30)代入,可得
(38)
(39)
將式(34)代入下式,并結合假設3,可得
ε(z(t),U(t-1))TBTPz(t)+um(t)TBTPz(t)≤
(40)
根據上述情況,可得到
(41)
將式(36)代入上式,整理可得
(42)
進一步整理,可得
(43)
t∈[0,T],對上式兩端求積分,可得
(44)
因為V(t)>0,所以有
(45)
根據假設1,可知
(46)
再根據引理1,可知跟蹤誤差z(t)收斂到0。
式(44)滿足不等式:
(47)

3 仿真驗證

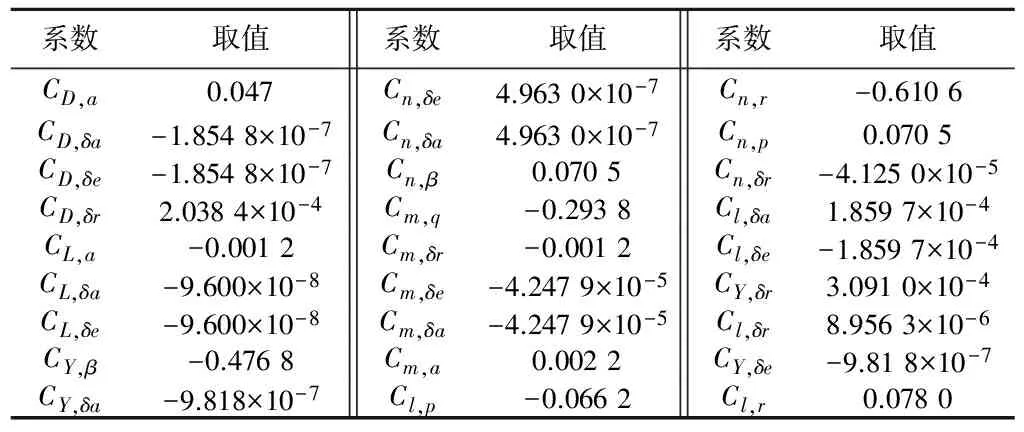
表1 氣動力和力矩系數
圖2~圖4中飛行器的攻角、側滑角和俯仰角可在較短的時間內跟蹤期望軌跡。
圖5~圖7中角速度可很好地跟蹤期望指令,說明設計的控制器可很好地克服系統中的不確定性以及外界擾動對系統的不利影響;同時,通過仿真結果可看出,攻角、側滑角和速度滾轉角可在較短的時間內實現精確跟蹤,充分體現了設計的控制器能較好地滿足高超聲速飛行器實現快速姿態調整與跟蹤的要求。另外,高超聲速飛行器飛行跨度大,氣動參數攝動劇烈。因此,將氣動力和力矩系數進行了+50%攝動情況下進行了仿真。
圖8~圖10可知,因為氣動力系數出現劇烈變化,攻角、側滑角和滾轉角在前3 s左右出現了較大的波動,但在第4 s左右開始能穩定地跟蹤期望軌跡。圖11~圖13可知,在氣動參數出現劇烈變化時,角速度在前幾秒出現了較大的波動,但波動并不是很大,仍在可承受的范圍內,且經過波動后,能趨于穩定。通過上述結果可說明設計的控制器能在氣動參數出現劇烈變化,飛行器進行大跨度飛行時,實現姿態穩定控制。
4 結論
(1)傳統的自適應控制、滑模控制難以處理系統中的非匹配不確定性,而神經網絡逼近具有萬能的逼近能力,可逼近任意不確定函數。所以,利用神經網絡逼近系統的不確定性是非線性控制與智能控制的結合運用。但神經網絡在進行逼近時會產生逼近誤差,利用魯棒項消除逼近誤差對系統性能的影響,是兩者相輔相成的突出表現。
(2)采用魯棒項為滑模變結構形式,既消除了神經網絡逼近誤差的影響,又提高了系統的魯棒性,且對其進行改進,避免了傳統滑模控制帶來的顫振現象。
(3)研究的Winged-Cone高超聲速飛行器數學模型是美國蘭利研究中心發布的,并公布了全套氣動參數,此模型能深刻的描述系統的強耦合、強非線性等特點,具有就較大的研究價值和意義,是較理想的控制系統設計平臺。
[1] Lohsoonthorn P,Jonckheere E,Dalzell S.Eigenstructurevs constrained design for hypersonic winged cone[J].Journal of Guidance,Control,and Dynamics,2001,24(4):648-658.
[2] Lind R.Linear parameter-varying modeling and control of structural dynamics with aerothermoelastic effects[J].Journal of Guidance,Control,and Dynamics,2002,25(4):733-739.
[3] Kuipers M,Mirmirani M,Ioannou P,et al.Adaptive control of an aeroelastic airbreathing hypersonic cruise vehicle[R].AIAA 2007-6326.
[4] Sigthorsson D O,Jankovsky P,Serrani A,et al.Robust linear output feedback control of an airbreathing hypersonic vehicle[J].Journal of Guidance,Control,and Dynamics,2008,31(4):1052-1066.
[5] Groves K P,Sigthorsson D O,Serrani A,et al.Reference command tracking for a linearized model of an air-breathing hypersonic vehicle[C]//Proc.of the AIAA Guidance ,Navigation and Control Conference and Exhibit.2005:6144-6158.
[6] Wang Q,Stengel R F.Robust nonlinear control of a hypersonic aircraft[J].Journal of Guidance,Control,and Dynamics,2000,23(4):577-585.
[7] Parker J T,Serrani A,Yurkovich S,et al.Control-oriented modeling of an air-breathing hypersonic vehicle[J].Journal of Guidance,Control,and Dynamics,2007,30(3):856-869.
[8] Fiorentini L,Serrani A,Bolender M A,et al.Nonlinear robust adaptive control of flexible air-breathing hypersonic vehicles[J].Journal of Guidance,Control,and Dynamics,2009,32(2):401-416.
[9] Xu H J,Mirmirani M,Ioannou P A.Robust neural adaptive control of a hypersonic aircraft[R].AIAA-2003-5641,2003.
[10] Wallner E M,Well K H.Nonlinear flight control design for the X-38 using CMAC neural networks[R].AIAA-2001-4042.
[11] Wu S F.Fuzzy logic based attitude control of the spacecraft X-38 along a nominal re-entry trajectory[J].Control Engineering Practice,2001,21(9):699-707.
[12] Marrison C,Stengel R F.Design of robust control systems for a hypersonic aircraft[J].Journal of Guidance,Control and Dynamics,1998,21(1):58-63.
[13] 宋超,趙國榮,李海君.臨近空間高超聲速飛行器自適應反演滑模控制[J].彈箭與制導學報,2012,32(3):49-52.
[14] Huo Y,Mirmirani M,Ioannou P A,et al.Altitude and velocity tracking control for an airbreathing hypersonic cruise vehicle[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit.Colorado:AIAA:2006,1305-1315.
[15] Xu H J,Ioannou P A,Mirmirani M.Adaptive sliding mode control design for hypersonic flight vehicle[J].Journal of Guidance,Control and Dynamics,2004,27(5):829-838.
[16] Keshmiri S,Mirmirani M D.Six-DOF modeling and simulation of a generic hypersonic vehicle for conceptual design studies[R].AIAA 2004-4805.
[17] Shaughnessy J D,Pinckney S Z,McMinn J D,et al.Hypersonic vehicle simulation model:winged-cone configuarion[R].NASA TM-102610,1990.
[18] 陳潔.近空間高超聲速飛行器非線性控制方法研究[D].煙臺:海軍航空工程學院,2009.
[19] Hamed Kebriaei ,M Javad Yazdanpanah.Robust adaptive synchronization of different uncertain chaotic systems subject to input nonlinearity[J].Commun Nonlinear Sci Numer Simulat,2010,15(3):430-441.
[20] Fayez F M El-Sousy.Adaptive hybrid control system using a recurrent RBFN-based self-evolving fuzzy-neural-network for PMSM servo drives[J].Applied Soft Computing,2014,25(21):509-532.
[21] Labus J,Hernández J A,Bruno J C,et al.Inverse neural network based control strategy for absorption chillers[J].Renewable Energy,2012,39(5):471-482.
[22] Mohsen,Farahani.Intelligent control of SVC using wavelet neural network to enhance transient stability[J].Engineering Applications of Artificial Intelligence,2013,13(26):273-280.
[23] Singh H P, Sukavanam N.Simulation and stability analysis of neural network based control scheme for switched linear systems[J].ISA Transactions,2012,51(24):150-110.
[24] Peng Jin-zhu,Rickey Dubay.Nonlinear inversion-based control with adaptive neural network compensation for uncertain MIMO systems[J].Expert Systems with Applications,2012,39(25):8162-8171.
(編輯:呂耀輝)
Adaptive neural network controller design for hypersonic vehicle
ZHAO He-wei,HU Yun-an,LIANG Yong,YANG Xiu-xia
(Department of Control Engineering,Naval Aeronautical and Astronautical University,Yantai 264001,China)
A nonlinear inversion-based controller with adaptive neural network compensation was designed for a class of hypersonic vehicle in the case that vehicle’s nonlinear model comprises of nonlinear unknown uncertain function caused by unmodeled dynamics,aerodynamic parameter variation and unknown external disturbances were fully considered.Firstly the dynamic characteristics of system were separated as two components:a nominal component and an uncertain component.The controller for the nominal component was designed based on nonlinear inversion control scheme,and uncertain component was approximated by the neural network.The optimal weight matrix was adjusted by adaptive learning law to improve the online approximated capability of neural network.The modified variable structure controller was designed for eliminating the effects of the neural network approximated errors.The controller can guarantee that the tracking error converges to zero and all signals of closed loop system are bounded.The simulation results demonstrate the rightness of the proposed schemes.
hypersonic vehicle;adaptive;neural network;variable structure control
2016-07-12;
2016-09-15。
航空基金(20140184001);中國博士后基金(2015M572693)。
趙賀偉(1985—),男,博士生,主要研究方向為非線性控制、自適應控制等。E-mail:www.zhwsdyt@163.com
V448
A
1006-2793(2017)02-0257-07
10.7673/j.issn.1006-2793.2017.02.022
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
