無人機平臺用多源信息融合導航技術
2017-05-03 00:56:41王于坤劉壯華楊紅喜黃丙勝
彈箭與制導學報 2017年4期
王于坤, 姜 梁, 劉壯華, 楊紅喜, 黃丙勝
(北京航天無人機系統工程研究所, 北京 100094)
0 引言
無人機系統在軍事方面具有獨特優勢,已被廣泛用于戰場前沿地帶的近距離偵察和監視等特殊任務[1]。導航系統作為無人機的眼睛,其可靠性和準確性至關重要。在松組合導航系統中,GPS仍然作為一個單獨的系統在使用[2],存在低于4顆星無法工作的情況。文獻[3]采用傳統的偽距、偽距率差值作為觀測信息,進行MEMS緊組合系統仿真工作,詳細的分析了少于4顆可見星狀態的定位性能。然而,在實際的MEMS緊組合系統中采用文獻[3]的緊組合算法,必須通過其他信息補償掉接收機的初始鐘差和鐘漂才能使用。文獻[4]提出的緊組合算法對大于3顆可見星的情況下進行了跑車實驗驗證。文獻[5]通過跑車實驗得出的結論是:可見星數目小于4時緊組合系統定位的緯度誤差、經度誤差小于100 m,且與導航時長無關。文獻[5]所提算法必須在接收機的初始鐘差等效距離誤差以及鐘漂等效距離率誤差引起的距離誤差均已經扣除的前提下才能實現,在實際應用中具有一定的局限性。文中提出了多源信息融合導航方案,并解決了組合導航系統航向角誤差無法估計以及可見衛星等于3顆時組合效果差的問題。
1 系統總體結構
該系統總體結構如圖1所示,主要由MIMU(micro-inertial measure unit)、GPS接收機、磁航向傳感器、氣壓高度計、空速傳感器和導航計算機組成。其中MIMU由三軸數字加速度計和三軸數字陀螺儀組成。磁航向傳感器采用霍尼韋爾公司的三軸數字磁阻傳感器HMC5883L。GPS接收機采用自研的高精度衛星導航接收機模塊。導航計算機采用DSP6747作為處理器。導航計算機是一種專用的數據采集和處理系統,它具備如下功能:1)采集MIMU的角速度、加速度測量值;2)接收GPS偽距、偽距率信息;3)采集磁強計數據;4)采集氣壓高度計和空速傳感器測量數據;5)完成導航和組合濾波[7-8]解算;6)輸出導航數據。

圖1 系統結構圖
2 數學模型
2.1 系統狀態方程
狀態變量選取為:
(1)
式中:φi(i=e,n,u)為姿態角誤差;δvi(i=e,n,u)為地理系下的速度誤差;δL、δλ、δh分別為緯度誤差、經度誤差和高度誤差。
狀態方程形式如下:
(2)
式中:F為9×9系統狀態轉移矩陣,矩陣中的元素由參考文獻[9]得到;G是9×6的系統噪聲驅動陣;W是6×1的系統噪聲陣。
2.2 系統觀測方程
GPS接收機第i個通道的偽距差、偽距率差量測方程如下:
式中:δX、δY、δZ為在地心地固坐標系中表示的位置誤差;Kij(j=1,2,3)是慣導解算位置到第i顆導航星的方向余弦;κij(j=1,2,3)表示Kij(j=1,2,3)的變化率;δTu是與時鐘誤差等效的距離誤差;δTru是與時鐘頻率誤差等效的距離率誤差[10]。
將通道i和j的量測信息進行一次差分,得到如下:
δMij=δMi-δMj=(Ki1-Kj1)δX+
(Ki2-Kj2)δY+(Ki3-Kj3)δZ+vij,M
(5)

(6)

1)基于偽距差分的觀測方程
(7)
式中:

2)基于偽距率差分的觀測方程
(8)
式中:

3)基于慣導高度與氣壓高度的觀測方程
由于氣壓高度和大氣靜壓直接相關,因此飛行高度的誤差來源主要是靜壓測量誤差。載體運動過程中,會引入較大的靜壓測量誤差,導致氣壓高度計測量不準確。利用空速傳感器測量的空速信息對氣壓高度進行補償。設慣導解算得到的高度信息為hI,氣壓高度計通過空速補償后的高度為hB。
(12)
4)基于慣導航向與磁航向的觀測方程
由于磁強計受環境影響比較大,因此必須標定后使用。設慣導解算得到的航向信息為ψI,磁強計標定后測量的磁強信息通過計算得到航向信息為ψm。
(13)

綜合式(7)、式(8)、式(12)和式(13)可以得到系統觀測方程如式(14)所示:
(14)
3 實驗結果
2016年11月11日進行了動態實驗。動態實驗共進行了兩次跑車實驗:第一次跑車實驗驗證多源信息融合導航系統在可見星大于3顆以上狀態下的導航性能;第二次跑車實驗用于驗證僅存在3顆星狀態下的導航性能。
3.1 跑車實驗一
本次跑車實驗歷時約35 min。采用高精度光纖組合導航系統作為基準系統(光纖陀螺全溫零偏穩定性小于0.1°/h,加表全溫零偏穩定性小于0.2 mg),測試導航系統性能。
圖2是系統實驗實物圖。圖3是可見衛星的數量曲線。圖4是多源信息融合導航系統與光纖組合導航系統跑車路線。圖5是姿態角對比曲線,藍色實線為光纖組合導航系統測量的姿態角曲線,綠色虛線為多源信息融合導航系統測量的姿態角曲線(由于安裝原因,相比于光纖組合導航系統存在一定的安裝誤差角)。圖6是速度誤差曲線。圖7是位置誤差曲線。多源信息融合導航系統與光纖組合導航系統的導航信息誤差統計如表1所示。

圖2 系統實驗實物圖
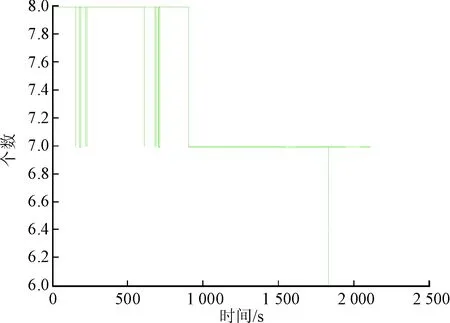
圖3 可見衛星數曲線
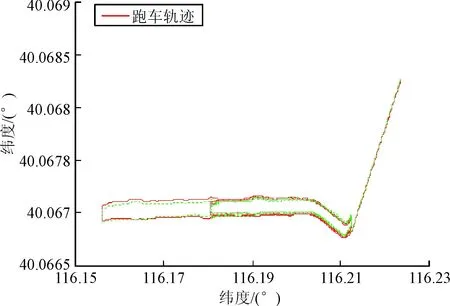
圖4 運動軌跡曲線

圖5 姿態角對比曲線
由表1可以看出:可見星大于3顆時,俯仰角誤差均值為-0.859 1°,橫滾角誤差均值為-0.076°,航向角誤差均值為0.830 1°;東速誤差均值為0.024 3 m/s,北速誤差均值為0.004 8 m/s,天向速度誤差均值為-0.035 m/s;經度誤差均值為-3.711 3 m,緯度誤差均值為-0.219 1 m,高度誤差均值為4.954 4 m。由此說明,文中設計的多源信息融合導航系統在大于3顆可見星的狀態下可以提供可靠的導航信息。

表1 導航信息誤差統計特性

圖6 速度誤差曲線

圖7 位置誤差曲線
3.2 跑車實驗二
本次實驗歷時30 min,任意選取3顆可見星進行導航信息融合,實驗結果為:
圖8是可見衛星的數量曲線,綠色虛線表示跑車情況下正常的收星個數;藍色實線表示實際使用的收星個數。圖9是跑車軌跡,綠色虛線表示多源信息融合導航系統跑車軌跡,紅色實線表示光纖組合導航系統跑車路線。圖10是姿態角對比曲線,藍色實線為光纖組合導航系統測量的姿態角曲線,綠色虛線為多源信息融合導航系統測量的姿態角曲線
(由于安裝原因,相比于光纖組合導航系統存在一定的安裝誤差角)。圖11是速度誤差曲線。圖12是位置誤差曲線。多源信息融合導航系統與光纖組合導航系統的導航信息誤差統計如表2所示。
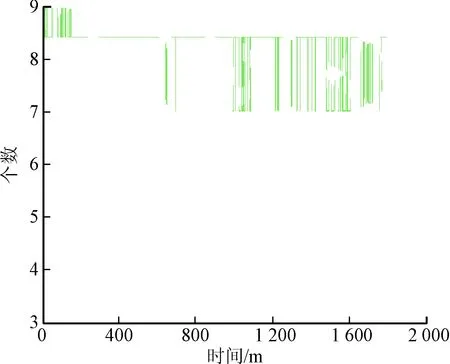
圖8 可見衛星數曲線
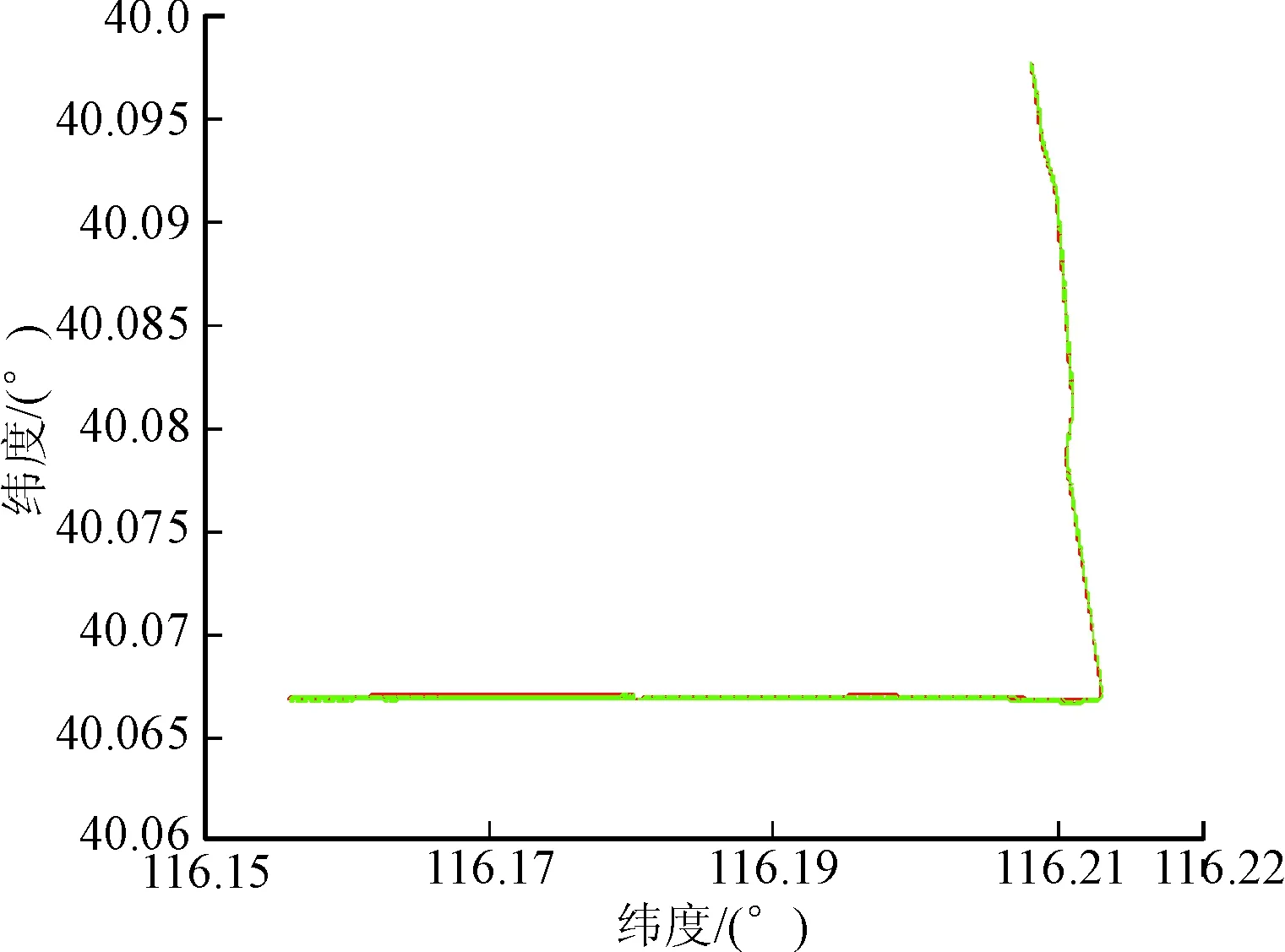
圖9 運動軌跡曲線

圖10 姿態角對比曲線

表2 導航信息誤差統計特性

圖11 速度誤差曲線

圖12 位置誤差曲線
由表2可以看出:可見星等于3顆時,俯仰角誤差均值為-0.282 0°,橫滾角誤差均值為-0.294 7°,航向角誤差均值為1.460 4°;東速誤差均值為0.020 8 m/s,北速誤差均值為0.001 3 m/s,天向速度誤差均值為-0.029 m/s;經度誤差均值為-4.924 3 m,緯度誤差均值為2.187 0 m,高度誤差均值為-8.812 6 m。由此說明,文中設計的多源信息融合導航系統在僅有3顆可見星的情況下依然可以提供穩定的導航信息。
4 結論
文中針對無人機平臺,設計了基于MIMU/GPS/磁強計/氣壓高度計/空速傳感器的多源信息融合導航系統。通過多源信息融合技術,實時估計系統誤差,完成系統校正。跑車實驗結果表明:設計的多源信息融合導航系統具有測量精度高、成本低、體積小的特點,具有很好的工程應用價值。
參考文獻:
[1] 昂海松. 微型飛行器系統技術 [M]. 北京: 科學出版社, 2013: 4-6.
[2] 王新龍, 李亞峰, 紀新春. SINS/GPS組合導航技術 [M]. 北京: 北京航空航天大學出版社, 2015: 1-6.
[3] ZHOU Qifan,ZHANG Hai, LI You,et al. An adaptive low-cost GNSS/MEMS-IMU tightly-coupled integration system with aiding measurement in a GNSS signal-challenged environment[J]. Sensors, 2015,15(9): 23954-23982.
[4] 郭美鳳, 林思敏, 周斌. 等. MINS/GPS一體化緊組合導航系統 [J]. 中國慣性技術學報, 2011, 19(2): 214-219.
[5] 鄭辛, 付夢印. SINS/GPS緊耦合組合導航 [J]. 中國慣性技術學報, 2011, 19(1): 33-37.
[6] GEBRE-EGZIABHER D, HAYWARD R C,POWELL J D. Design of multi-sensor attitude determination systems [J]. IEEE Transations on Aerospace and Electronic Systems, 2004,40(2): 627-649.
[7] 陳帥, 王于坤, 李璽安. 分布式光電平臺用MIMU傳遞對準技術 [J]. 中國慣性技術學報, 2013, 21(6): 706-709.
[8] ZARCHAN Paul. Fundamentals of kalman filtering: A practical approach[M]. 3rd ed. [S.l.]: American Institute of Aeronautics and Astronautics Inc., 2009: 549-585.
[9] 秦永元. 慣性導航 [M]. 北京: 科學出版社, 2014: 355-160.
[10] 王惠南. GPS導航原理與應用 [M]. 北京: 科學出版社, 2003: 244-246.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中華手工(2017年2期)2017-06-06 23:00:31
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中外會展(2014年4期)2014-11-27 07:46:46
