基于強跟蹤濾波的傳感器目標跟蹤算法
2017-05-10 11:49:05曾明
電子測試 2017年4期
曾 明
(湖南現代物流職業技術學院,湖南長沙,410131)
基于強跟蹤濾波的傳感器目標跟蹤算法
曾 明
(湖南現代物流職業技術學院,湖南長沙,410131)
為了提高運動目標的跟蹤精度,提出一種基于強跟蹤濾波的傳感器目標跟蹤算法。首先通過傳感器節點測量目標的狀態值,并通過融合中心對信息進行融合,然后利用Cholesky分解技術變換成噪聲獨立的量化融合系統,并采用強跟蹤濾波算法對目標狀態進行估計,最后與其它目標跟蹤算法進行對比實驗。結果表明,本文算法不僅提高了目標跟蹤的精度,而且具有更好的魯棒性。
目標跟蹤;無線傳感器網絡;強跟蹤濾波算法;信息融合
0 引 言
目標跟蹤是計算機研究領域一個重要問題,其在軍事、交通、監控、工程控制等領域有巨大的應用價值,引起了人們的廣泛關注[1]。隨著信息融合的迅速發展,許多學者將無線傳感器技術引入到目標跟蹤研究中,相對于傳統的目標跟蹤技術,無線傳感器技術具有跟蹤更及時、更可靠、成本更低等優點,成為當前目標跟蹤的主要研究方向[2]。
針對基于無線傳感器的目標跟蹤問題,國內外許多學者和眾多專家投入了大量的時間和精力,進行了深入的研究。與傳統的目標跟蹤系統不同,無線傳感器網絡由大量的傳感器節點組成,最原始的方法是基于單傳感器節點目標跟蹤,取得了不錯的應用效果[3]。然而隨著運動數量的增多,而且這些微型傳感器節點的計算能力、能量、通信能力有限,同時由于在目標跟蹤過程中,由于目標自身運行機動性、外界因素的干擾,以及單一傳感器節點采集數據不完整性等條件限制,單個傳感器的目標技術難以滿足實際的應用需要,從而出現多傳感器數據融合的目標跟蹤技術[4]。采用多傳感器對目標進行跟蹤,可以最大限度利用有用信息,獲得比單傳感器更加理想的結果,成為當前傳感器研究的重點[5]。傳感器數據融合包括兩種方式:集中式和分布式,集中式融合也稱為量測融合,即將單一傳感器采集的數據全部送到融合中心,信息量損失小,能夠獲得理論上的最優跟蹤結果,主要有概率論法、經典分配法、最近鄰法、多元假設法等[6],該類方法對融合中心數據處理能力以及通信帶寬要求十分高,如果融合中心出現故障,那么整個跟蹤系統就處于癱瘓狀態,系統穩定性、可靠性差[7]。分布式融合也叫航跡融合,每一個傳感器均有自己的跟蹤濾波器,首先它們只測量各自的局部目標運動軌跡,然后融合中心對目標運動軌跡進行關聯,主要有信息去相關法、協方差加權法、強跟蹤法等[8],其對融合中心要求低,可擴展能力強,具有一定的優勢,其中有擴展卡爾曼濾波(Extended Kalman Filter,EKF)、無跡卡爾曼濾波(Unscented Kalman Filter,UKF)、粒子濾波(Particle Filter,PF)等應用最為廣泛[9]。EKF算法原理簡單,容易實現,但在強非線性和非高斯環境下跟蹤性能較差,然而在實際應用,許多因素使目標運動軌跡具有非線性、非高斯分布現象,跟蹤精度低;相對于EKF,UKF具有一定的非線性擬合能力,但要求系統滿足高斯分布條件;PF對目標進行跟蹤時,其性能與重要性函數和重采樣策略密切相關,其適合于估計精度要求低的場合,但是系統似然函數呈尖峰狀態時,估計精度相當低,而且,計算量非常大,很難滿足實時性的需求,因此實際應用價值不高。為此,許多研究學者提出了改進目標跟蹤算法,以彌補這些算法的不足,如迭代擴展卡爾曼濾波(IEKF)、容積卡爾曼濾波(CKF)等[10,11],但是這些算法假設各傳感器的量測噪聲不相關,但是文獻[12]研究結果表明感器之間的量測噪聲往往相關,所以研究量測噪聲相關條件目標跟蹤具有更加重要的實際實用價值。
為解決無線傳感器網絡有限帶寬和相關噪聲造成的精度影響,提了一種強跟蹤濾波的傳感器目標跟蹤算法,并通過仿真實驗測試其估計精度和魯棒性。
1 目標跟蹤問題描述
1.1 非線性目標跟蹤數學模型
在目標跟蹤系統中,目標跟蹤數學模型是建模的第一步,也是最基本的組成部分。目標在實際運動過程中,由于多種因素綜合影響,可能導致突然加減速、變向以及轉彎等隨機運動行為,運動軌跡呈現非線性變化,導致目標跟蹤是一種復雜的非線性系統。由于本文主要研究多傳感器單目標跟蹤問題,設無線傳感器網絡由N個微型節點組成,那么傳感器網絡跟蹤系統的目標運動狀態方程和測量方程可以描述為:

其中,x( k)∈Rn×1為目標狀態;yi( k)∈Rp×1為第i個傳感器的測量值,A( k)∈Rn×n為狀態轉移矩陣;w( k)表示過程噪聲;μ(k )∈Rp×1表示測量噪聲; Γ ( k ) 為過程噪聲驅動矩
i陣;Hi(k)∈Rp×n為相應的測量矩陣[12]。
假設各個傳感器之間w(k)以及μi(k)均相關,那么有:
跟蹤目標初始狀態x(0)的均值和方差分別為x0,P0,且與w( k)和μi(k)不相關[13]。
1.2 單傳感器局部測量值的量化
在傳感器網絡的目標跟蹤過程,為了充分利用網絡帶寬,單一節點首先對自己采集的信息進行量化,然后發送到融合中心,即有:
式中,Δi(k,r)表示量化步長[14]。
1.3 各傳感器量測噪聲去相關
無線傳感器網絡融合中心的測量方程為:

其中,()V k表示擴維測量噪聲,其方差滿足:
w( k)與V( k)的相關性為:

根據Cholesky分解[15],RV(k)可以唯一地分解:

那么式(5)可以轉化為:
這樣各傳感器的測量噪聲互不相關,測量與過程噪聲間的相關性可以描述為:
傳感器網絡跟蹤系統的目標運動狀態方程可重寫為:
2 強跟蹤濾波的目標跟蹤算法
在EF算法,預測和分析的誤差協方差可以描述為:
其中,X為狀態向量,T代表矩陣轉置。
在式(16)中,由于真實狀態Xt的值未知,因此預測和分析誤差的協方差當然亦未知,因此獲得PF和PA是EF算法最為關鍵的部分。強跟蹤濾波算法將全部預測狀態存放于XEF中,全部分析狀態存放于中XEA,那么式(16)就可以變為:
因此,強跟蹤濾波算法較好的克服了EF算法存在的不足,可以通過從非線性集合對誤差協方差進行估計。
基于強跟蹤濾波算法的多傳感器目標跟蹤步驟為:
(1)狀態初始化。根據先驗知識產生N個初始狀態集合X0:
(2) 對第k時刻的狀態進行估計,即有:
然后計算第k+1時刻的狀態值,并計算它們的平均值:
(3)計算k+1時刻的增益矩陣:
(5)返回步驟(2),進入下一時刻。
綜合上述可知,基于強跟蹤濾波算法的多傳感器目標跟蹤系統結構如圖1所示。
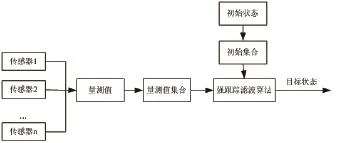
圖1 目標跟蹤系統的結構
3 仿真實驗
3.1 仿真參數
為了驗證本文算法的有效性,在Intel 2.90 GHz CPU,4G DDR3 RAM,800GB 硬盤,Windows XP操作系統平臺下,采用Matlab 2012編程進行仿真實驗,并采用文獻[15]進行對比實驗。假設有3個傳感器對目標狀態進行跟蹤,目標做勻速運動,目標動態方程可描述為:

其中,Q(k)=0. 25,仿真時間100s。
3.2 結果與分析
3.2.1 目標狀態均勻變化時的性能對比
當目標狀態均勻變化時,本文算法與文獻[15]算法的仿真結果如圖2和圖3所示。從圖2和圖3不難發現,相對于文獻[15]的目標跟蹤算法,本文算法的估計精度更高,有效降低了跟蹤誤差,獲得更加理想的跟蹤效果。
3.2.2 目標狀態發生突變時的性能對比
為了進一步測試算法的魯棒性,測試目標狀態發生突變時的跟蹤的準確性,設在第30時刻,目標狀態發生了一個突變,兩種算法的仿真結果如圖4和圖5所示。從4和圖5可以清楚看出,
在發生突變條件下,本文算法可以以較好的速度對目標實現跟蹤,而文獻[15]算法經過較好的調整后才能對目標實現準確跟蹤,對比結果表明了本文算法是一魯棒性強、精度高的目標跟蹤算法。
4 結束語
仿真結果表明,相對于當前性能較優的傳感器目標跟蹤算法,本文算法不僅提高了目標跟蹤精度,可以能夠準確地對目標變化狀態實際跟蹤,大幅度降低了跟蹤誤差,而且對于機動性目標可以實現準確跟蹤,具有較好的魯棒性。
[1]韓崇昭,朱洪艷,段戰勝.多源信息融合[M]. 北京:清華大學出版社,2006.
[2]肖勝,邢昌風,石章松. 無線傳感器網絡中面向目標跟蹤的動態分簇方法[J]. 計算機工程與應用, 2012, 48(35): 88-92.
[3]ZHOU Yan, LI Jian-xun, WANG Dong-li. Target tracking in wireless sensor networks using adaptive measurement quantization [J]. Science China Information Sciences, 2012, 55(4):827-838.
[4]XU Jian, LI Jian-xun, XU Sheng. Data fusion for target tracking in wireless sensor networks using quantized innovations and Kalman filtering [J]. Science China Information Sciences, 2012, 55(3):530-544.
[5]郭文艷,韓崇昭,雷明.迭代無跡Kalman粒子濾波的建議分布[J].清華大學學報:自然科學版,2007,41(S2):1866-1869
[6]石章松,鄒 岡,劉 忠. 傳感器網絡中的分布式粒子濾波被動跟蹤算法比較研究[J].傳感技術學報,2007,20(6):1344-1348.
[7]陳佩軍. 無線傳感器網絡的目標跟蹤算法研究[D].浙江工業大學,2011.
[8]周同馳,艾斯卡爾·艾木都拉,王榮栓,等.多源測量信息融合的弱點動目標跟蹤算法[J]. 計算機工程與應用, 2012, 48(2): 182-184.
[9]GE Quan-bo, XU Ting-liang, WEN Cheng-lin. Networked Kalman filtering with combined constraints of bandwidth and random delay [J]. Science China Information Sciences, 2012, 55(10): 2343-2357.
[10]管冰蕾,湯顯峰,徐小良.噪聲相關的帶寬約束傳感器網絡融合算法[J].河南大學學報(自然科學版), 2013, 43(2): 200-203.
[11]段戰勝,韓崇昭. 相關量測噪聲情況下多傳感器集中式融合跟蹤 [J].系統工程與電子技術, 2005, 27(7): 1160-1163.
[12]郭輝,姬紅兵,武斌. 采用擬蒙特卡羅法的被動多傳感器目標跟蹤[J]. 西安電子科技大學學報(自然科學版), 2010,37(6):1042-1047.
[13]巫春玲,韓崇昭.平方根求積分卡爾曼濾波器[J]. 電子學報, 2009,37(5):987-992
[14]李良群,姬紅兵,羅軍輝. 迭代擴展卡爾曼粒子濾波器[J].西安電子科技大學學報, 2007,34(2):233-238.
[15]湯顯峰,管冰蕾,葛泉波,等.一種多傳感器量化融合目標跟蹤方法[J]. 計算機應用研究,2014,29(1):100-114
Sensor racking algorithm based on strong tracking filtering
Zeng Ming
(Hunan Vocational College of Modern Logistics, Changsha Hunan, 410131)
In order to improve the tracking precision, a novel wireless sensor networks tracking algorithm based on strong tracking filtering algorithm is proposed in this paper. Firstly, the messages which are collected by wireless sensor nodes are sent to the fusion centre, and then, cholesky factorization technology is used to establish the state equation, and strong tracking filtering technique is introduced to estimate target tracking, finally the simulation experiments are carried out to test the performance. The results show that the proposed algorithm has higher estimation precision and the robustness compared with other algorithms.
target tracking;wireless sensor networks;strong tracking filtering algorithm;information fusion
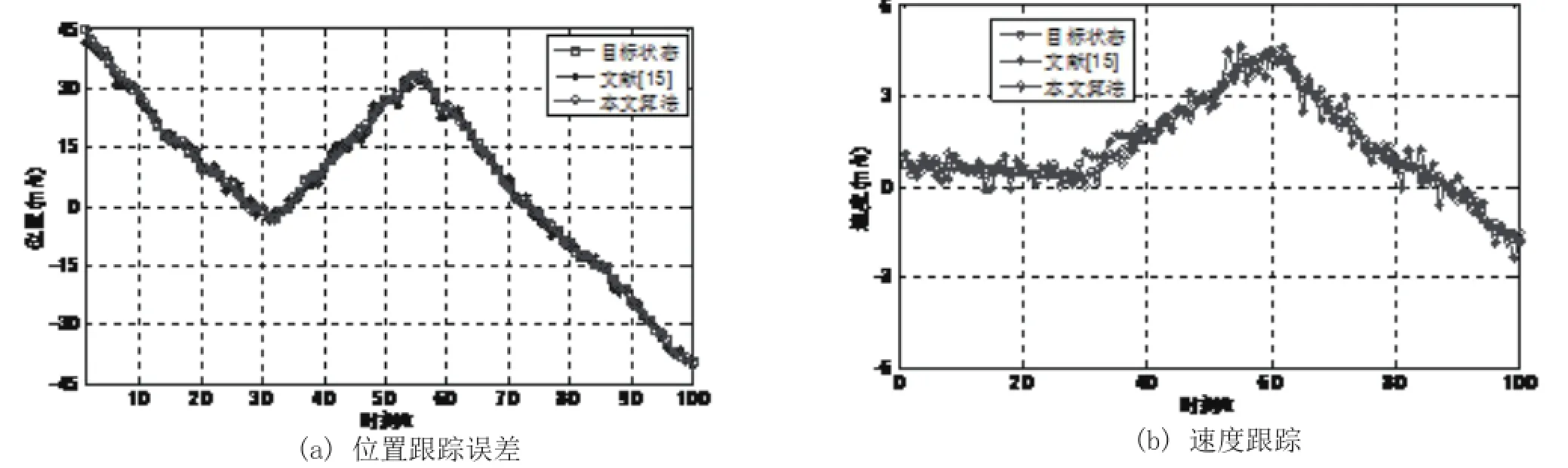
圖2 本文算法與文獻[15]的目標跟蹤曲線

圖3 本文算法與文獻[15]算法的跟蹤誤差對比
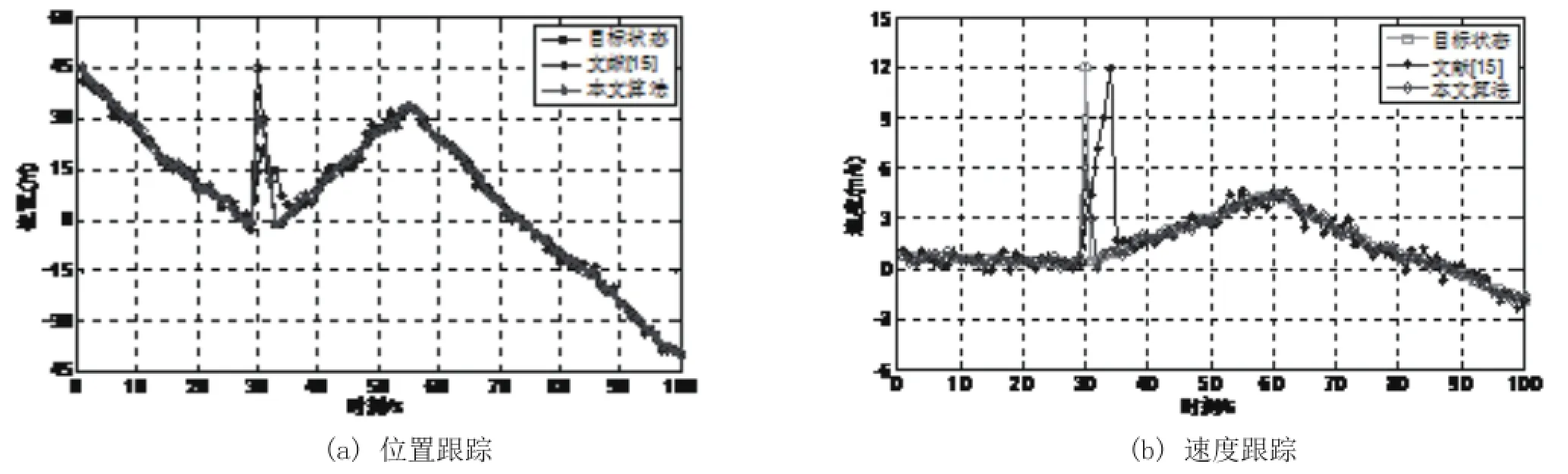
圖4 兩種算法的估計曲線
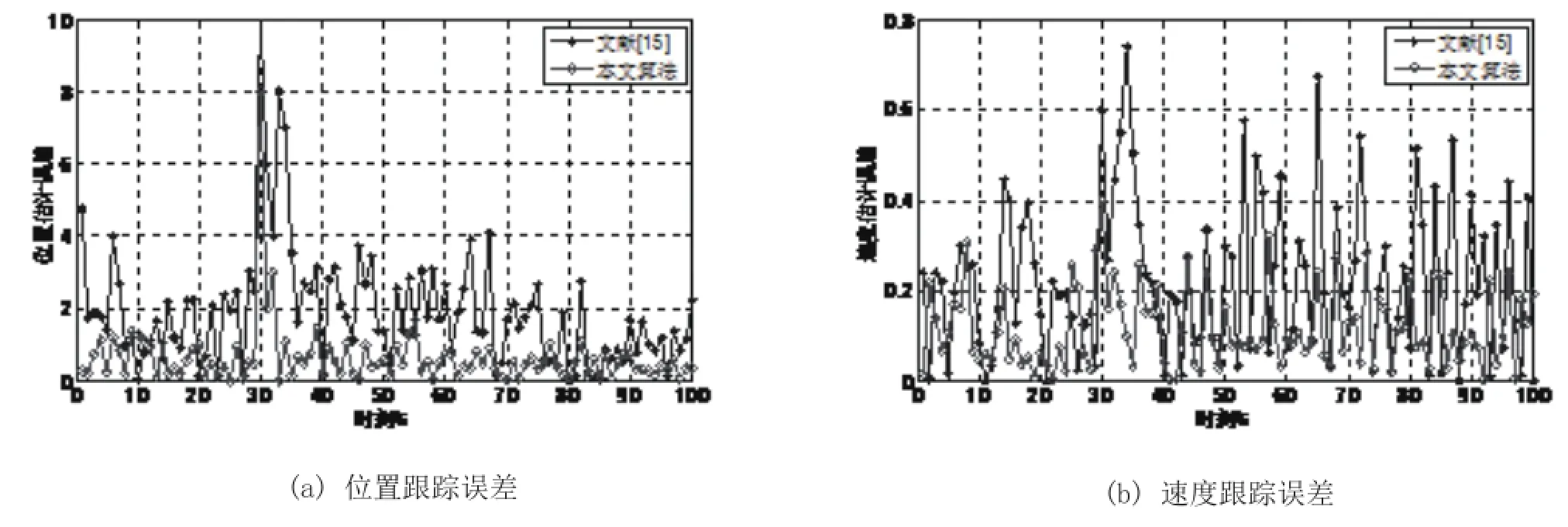
圖5 本文算法與文獻[15]算法的跟蹤誤差對比
湖南省科技重大專項(2010FJ1005)
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45