垂直鉆井系統矢量控制糾斜算法設計*
2017-05-12 02:01:45吳文晉白玉新程召江李艷麗
石油管材與儀器 2017年2期
關鍵詞:設備
吳文晉,白玉新,程召江,李艷麗
(1.航天科技集團第十八研究所 北京 100076;2.中石油西部鉆探工程有限公司鉆井工程技術研究院 新疆 克拉瑪依 834000;3.大慶第五采油廠 黑龍江 大慶 163000)
·開發設計·
垂直鉆井系統矢量控制糾斜算法設計*
吳文晉1,白玉新1,程召江2,李艷麗3
(1.航天科技集團第十八研究所 北京 100076;2.中石油西部鉆探工程有限公司鉆井工程技術研究院 新疆 克拉瑪依 834000;3.大慶第五采油廠 黑龍江 大慶 163000)
傳統的垂直鉆井設備控制策略中,由于液壓分系統的限制,一般采用六位置控制策略,所以設備的控制合力指向角不能準確指向高邊方向,控制精度難以滿足需求,易造成井眼軌跡螺旋化。為了克服六位置控制方式的不足,在液壓分系統輸出壓力可控條件下,提出了一種矢量控制方法;通過矢量分解得出每個液壓分系統需要輸出的分力,保證液壓機構輸出的合力精確指向高邊方向,并討論了在液壓分系統輸出能力有限時合力指向的精度誤差。此方法克服了六位置控制算法不能精確導向的缺點;井下試驗驗證了控制算法的可行性和工作可靠性。
垂直鉆井系統;矢量控制算法;六位置控制算法;導向力合力;合力指向角
0 引 言
隨著石油鉆探向更深、更偏遠領域的拓展,鉆探成本不斷增加;高陡構造、斷層、鹽層等地質條件下,鉆井容易出現井斜角過大,嚴重影響鉆井效率[1]。垂直鉆井系統(以下簡稱垂鉆系統)是一種具有主動防斜能力的井下機電液一體化制設備,鉆進過程中具有自動控制井斜的作用,對于改善井眼質量,提高機械鉆速具有積極作用[2,3]。
垂鉆系統按照其工作方式不同,可以分為推靠式和指向式。推靠式在導向過程中,導向塊伸出并推靠井壁產生側向力,控制鉆進方向改變;指向式中導向塊的伸縮使近鉆頭處與鉆頭相連的旋轉鉆柱彎曲,使旋轉鉆柱的軸線和井眼軸線之間出現夾角,從而實現鉆進方向改變[4]。
因為工具的機械結構不同,垂鉆糾斜策略的控制方式也不同。文獻[5]中孫峰等人介紹了捷聯式垂鉆設備及其動態推靠式的控制原理和控制方法。文獻[6,7]對調制式導向設備的控制算法和導向力合成誤差進行了詳細分析。但上述的捷聯式和調制式系統同靜態推靠式系統機械結構有著本質不同。文獻[8]中蘇義腦等人介紹了靜態推靠式垂鉆系統的控制方法,即傳統六位置控制方法。文獻[9]中介紹了一種旋轉導向用位移偏執矢量控制算法,該方法已成功用于旋轉導向鉆井試驗,該矢量算法導向原理類似于可控彎接頭,與本文提出的推靠式矢量方法有本質不同。以下為靜態推靠式矢量控制算法原理與實現。
1 原有控制方法及不足
垂鉆工具測量的工程參數包括井斜角和高邊工具面角。井斜角反映了井眼軌跡的傾斜程度,高邊工具面角反映了推靠式垂鉆工具不旋轉外套的零位相對于高邊旋轉的角度。在原有的推靠式垂直鉆井工具中,一般采用六位置或八位置方式進行糾斜控制[10]。六位置控制方式垂直鉆井工具中,液壓執行機構一般由三個或者四個導向塊和與導向塊配套的電磁閥組成,并配有一個電動泵或其他形式的液壓泵作為液壓動力源,如圖1所示。因為電磁閥只有開關兩種狀態,決定了液壓機構的導向塊只有伸出和縮回兩種工作方式,并且每個導向塊輸出的導向力恒定,不能調節輸出力的大小。

圖1 六位置控制方式的液壓執行機構原理圖
產品設計中常常將導向塊A位置設計成高邊工具面角零度,導向塊A、B、C順時針排布,如圖2所示。垂鉆設備以斜角作為控制對象,當實測井斜角大于閾值時,對應高邊工具面角的導向塊伸出,將工具向井斜角減小的方向推靠,改變工具鉆進方向,從而實現糾斜的目的。以圖2為例,控制策略中高邊工具面角和導向塊之間的關系見表1。
由表1可知,合力指向角總有六種組合,因此稱為“六位置控制”,理論上最差情況下,合力指向角和高邊有30°的夾角。實際工況中,不旋轉外套和旋轉外套之間通過軸承連接,不可避免的存在不旋轉外套緩慢旋轉情況,并且系統進行一次閉環運算周期時間較長,加劇了合力指向角和高邊工具面角間的不重合度,嚴重時造成井眼軌跡螺旋化。
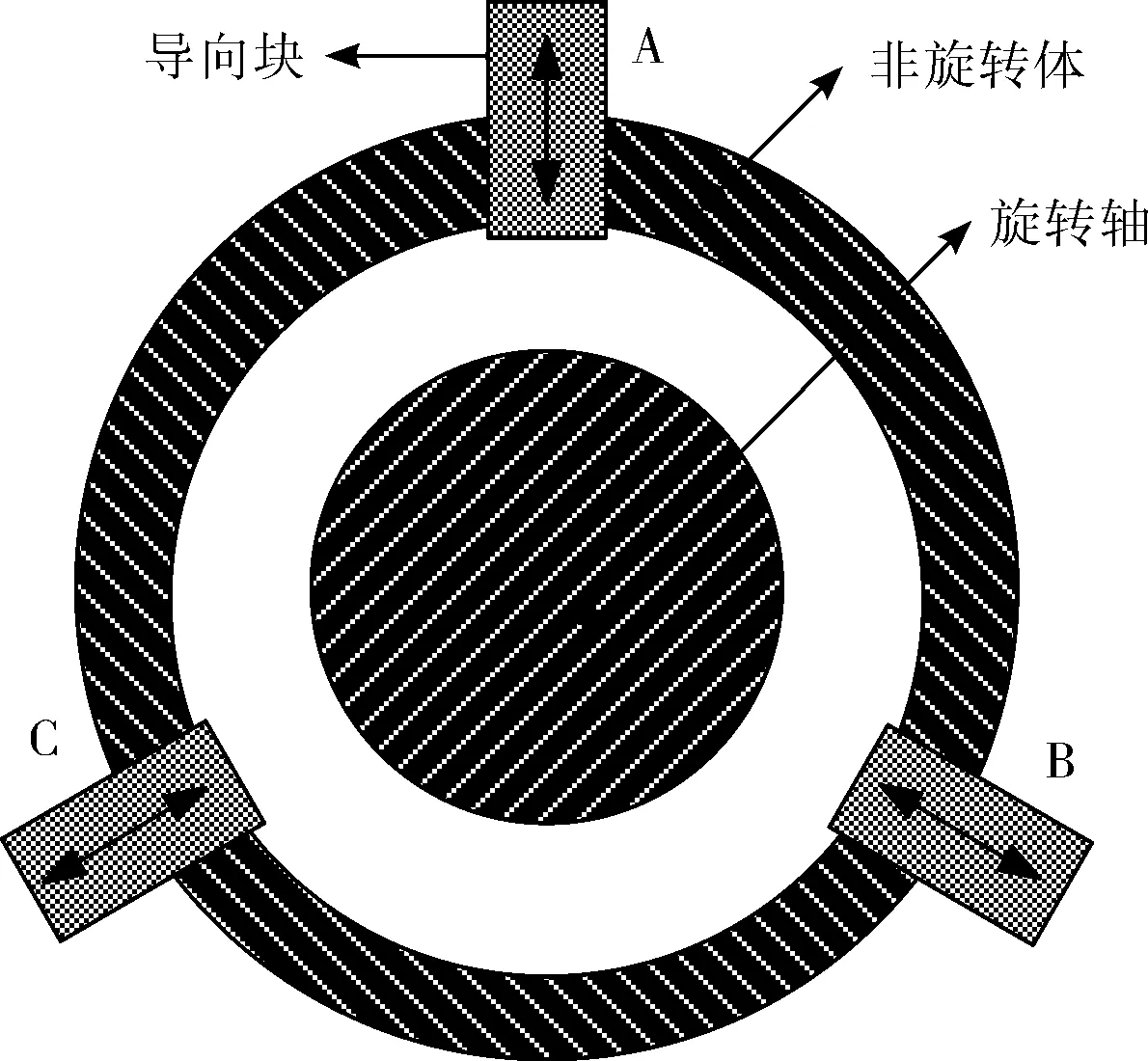
圖2 三導向塊推靠式液壓模塊示意圖
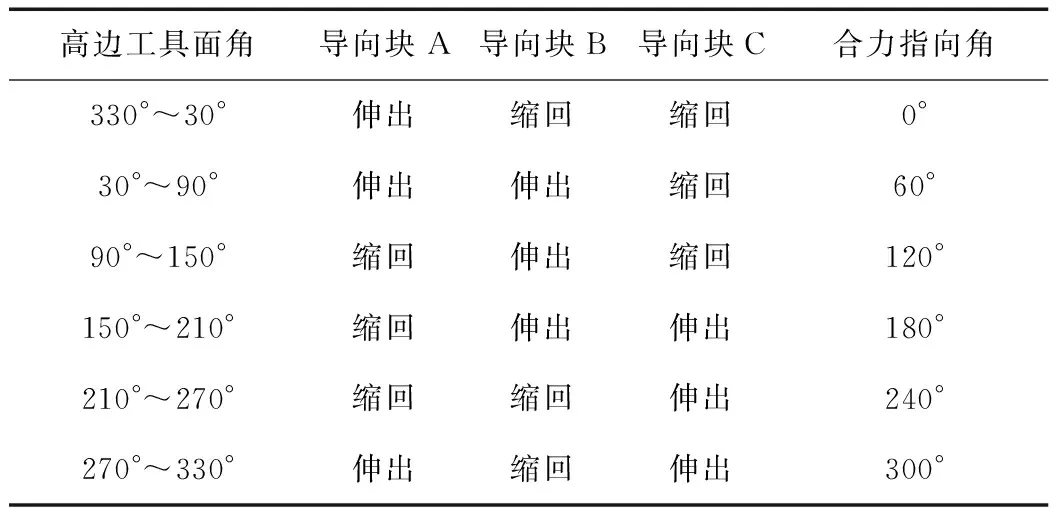
高邊工具面角導向塊A導向塊B導向塊C合力指向角330°~30°伸出縮回縮回0°30°~90°伸出伸出縮回60°90°~150°縮回伸出縮回120°150°~210°縮回伸出伸出180°210°~270°縮回縮回伸出240°270°~330°伸出縮回伸出300°
2 矢量控制算法
為了克服六位置控制方法的不足,使得合力指向角精確指向高邊工具面角,需對推靠式垂鉆設備的液壓執行機構進行改造,改造后的液壓機構單個導向塊的輸出導向力可控。在垂鉆工具導向塊排列上,仍然采用和六位置控制方式相同的排列方式。矢量控制方式導向塊輸出指定大小的力,各個導向塊不是簡單的伸出或縮回,而是在合力的作用下推靠在井壁上。在井壁的反作用力下,三個導向塊伸縮狀態不同。
為了保證輸出理想合力精確指向高邊工具面角,需要對指向工具面角的理想合力進行矢量分解。如圖3所示,圖中坐標系為順時針旋轉復數坐標系;導向塊分力和理想合力滿足如式(1)關系。
(1)

工具設計中,往往將導向塊A的位置設計為高邊工具面角零度位置,導向塊B對應高邊工具面角120°位置,導向塊C對應高邊工具面角240°位置。公式(1)可以寫成:
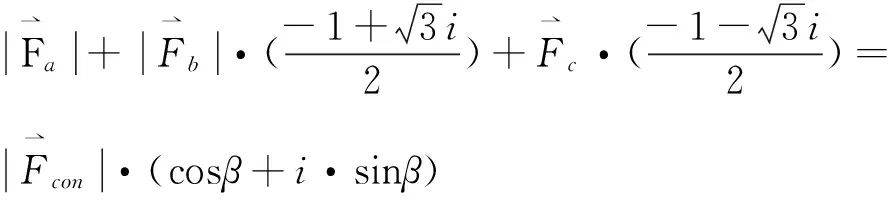
(2)
圖3 導向塊輸出力和合力示意圖
轉換為方程組:
(3)

當0°≤β≤120°

(4)
當120°≤β≤240°
(5)
當240°≤β≤360°
(6)

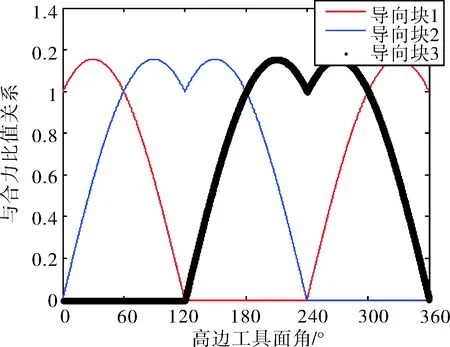
圖4 各個導向塊輸出力與高邊工具面角關系
(7)
在一些地層造斜力較大的場合,垂鉆工具對工具糾斜能力有更大的要求。此時可以適當放寬對合力指向角和高邊工具面角控制精度的要求,轉而要求隨時輸出最大的合力,以全力控制降斜。指定合力大小等于Fmax,此時三個導向塊輸出合力的大小隨著高邊工具面角變化而變化,角度也會同高邊工具面角發生偏差。下面采用矢量控制算法,計算在這種條件下,輸出導向合力和Fmax的關系。以及導向合力指向角和高邊工具面角的偏差。以0°≤β≤120°為例,由于各個模塊最大輸出力不會超過Fmax;0°≤β≤60°內各個導向塊實際輸出力,如式(8)所示:
(8)
合力如式(9)所示:
(9)
(10)

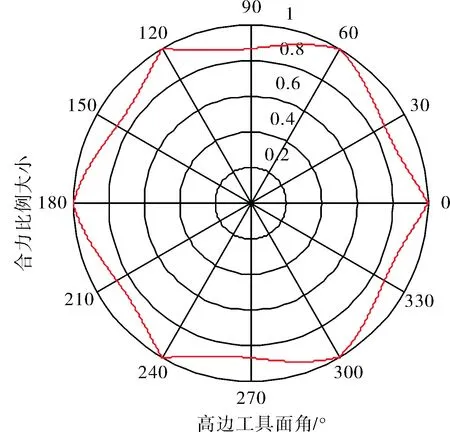
圖5 合力大小和高邊工具面角關系
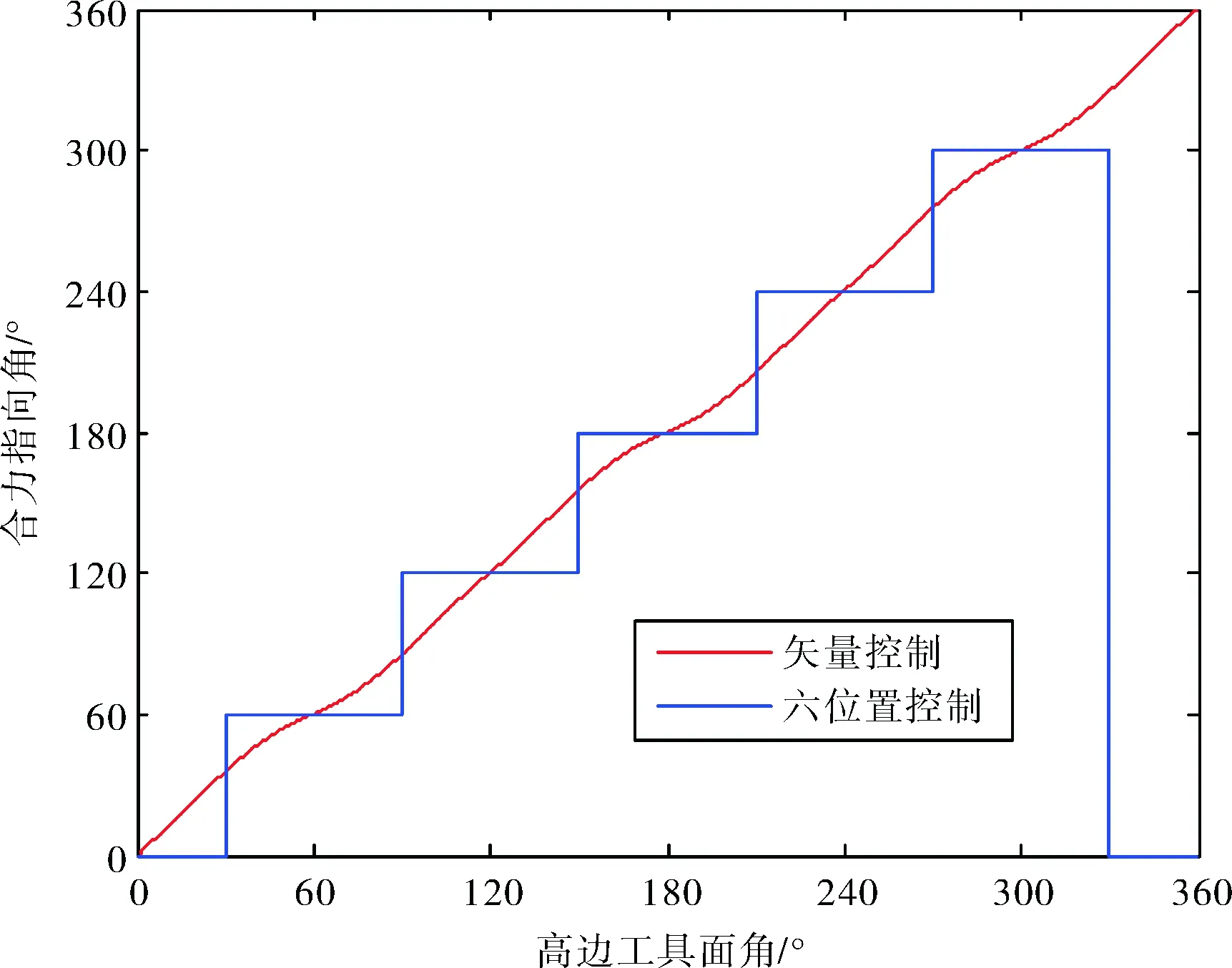
圖6 矢量算法與六位置算法控制角度誤差
同理可以計算出,β在37.64°、82.36°、157.64°、202.36°、241.64°及322.36°時跟高邊工具面角出現最大偏差,偏差角度5.688°;合力指向角同高邊關系如圖6所示。
3 實驗驗證
為了測試矢量控制算法的有效性,垂鉆設備采用矢量控制算法,在新疆阿克蘇克深08-XX井進行了井下實驗;此次試驗采用最大合力的工作方式。設備入井時井深2 921 m,井斜0.9°。單次入井純工作時間92 h,鉆進420 m。設備工作初期井眼軌跡井斜角從0.9°下降到0.3°;此后由于垂鉆設備采用滯環方式進行降斜控制,井斜角長期徘徊在0.2°~0.4°之間。
圖7為設備井下工作初期(只有開泵通泥漿條件下設備才能記錄數據,此數據為截取的初期500分鐘的數據)記錄的井斜角和設備合力數據。可以看出,整個設備工作期間,井斜角逐步下降,并穩定至0.3°附近。與井斜角相對應,合力大小在井斜角低于0.3°后降到零附近,原因是在允許工程誤差范圍內,經驗上認為此時無需控制。圖中23D,21:44:28時左右,井斜角出現一次較大波動,此次波動主要由現場設備劃眼引起。此次劃眼造成了井斜角超過滯環閾值0.4°,設備開始糾斜。
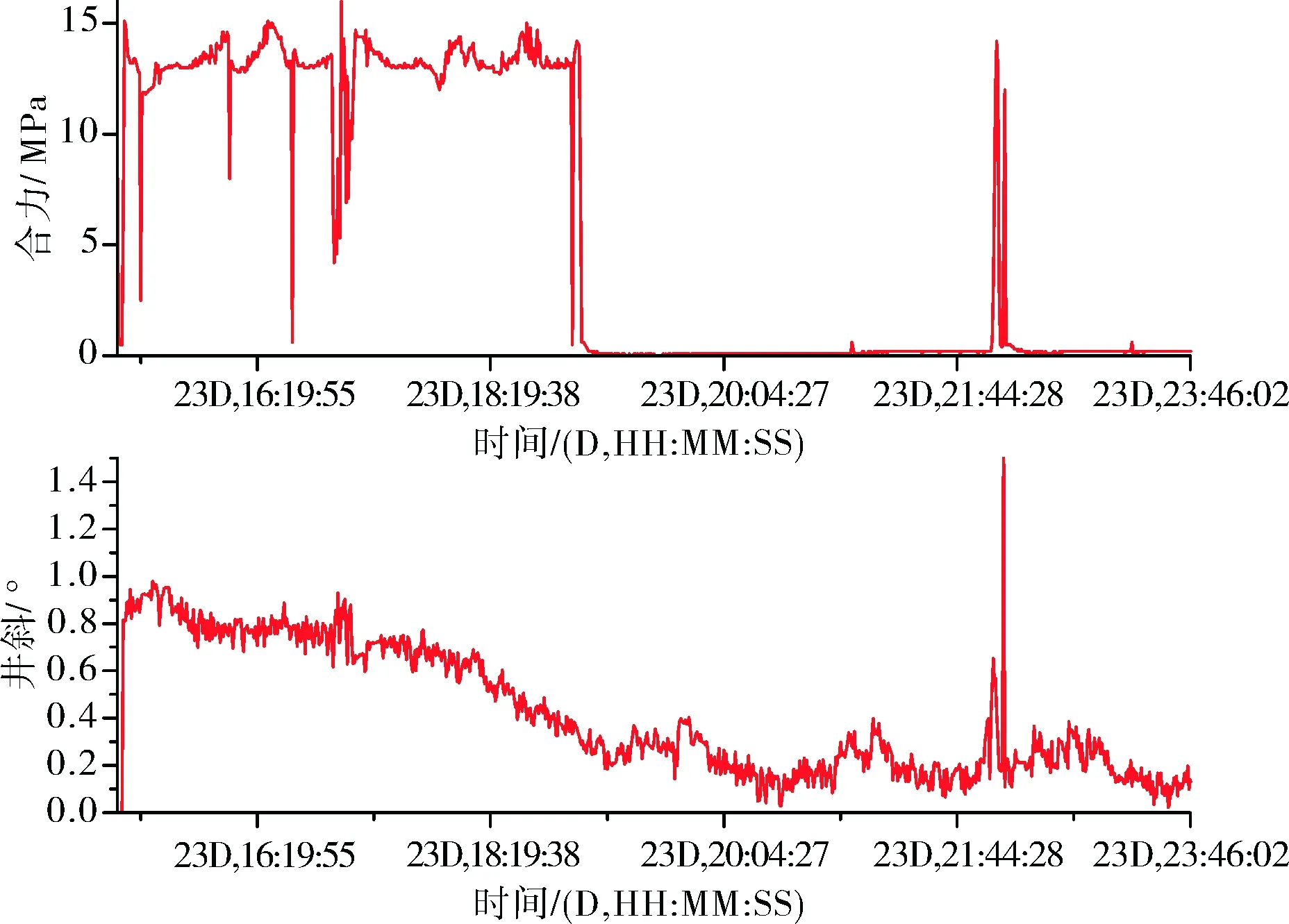
圖7 井下井斜角與合力大小情況
圖8為井下存儲的高邊工具面角和合力指向角情況。從圖中對比可以看出合力指向角跟隨著高邊工具面角變化。23D,18:19:38后合力指向角和高邊工具面角不再具有對應關系,原因同樣為井斜角下降到工程運行誤差以內,設備停止控制。
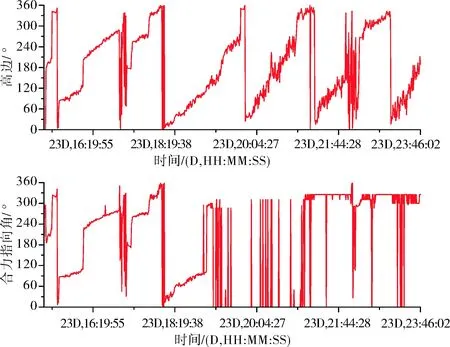
圖8 井下高邊工具面角和合力指向角對應圖
圖9采用統計方法,記錄以上時間段內合力指向角和高邊工具面角關系,以及合力大小同高邊工具面角關系。從圖中可以看出,合力大小和高邊具有明顯的周期特征,從0°開始,每隔60°合力大小出現一次最大值,與理論分析一致;合力大小還有一部分數據出現在0附近,是因為該工作點時刻井斜角已經降到允許范圍以內,液壓設備停止工作。實測井下合力指向角和高邊雖然具有較好的跟隨性,但和理論分析有一定程度的誤差,現場分析與A、B工位壓力偏低有關,即A、B工位的最大輸出力小于要求輸出的最大合力值。統計得出的最大誤差角度約16°;同許多合力點分布在0°附近一致,合力指向角許多工作點分布在0°或者360°附近,也是因為該工作點時刻設備停止控制所致。
4 結束語
垂鉆具有可控壓力的輸出能力后,通過調整控制方式,使得垂鉆設備具有了精確指向高邊的能力。矢量控制方式能夠克服傳統六位置控制可能引起的井眼軌跡螺旋化的缺點,另外矢量控制算法能讓垂鉆設備能夠準確改變鉆進方向,也為垂鉆設備發展到旋轉導向設備提供了技術支持。
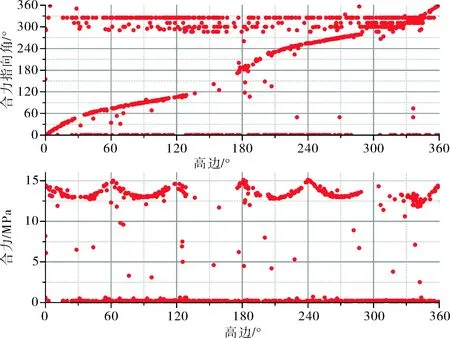
圖9 合力與其指向角同高邊工具面角關系
[1] 張邵槐. 深井、超深井和復雜構造井垂直鉆井技術[J].石油鉆探技術. 2005, 33(5): 11-15.
[2] 艾才云, 穆總結, 宋朝暉,等. Φ311mm垂直鉆井系統的工作原理及現場應用[J].鉆采工藝, 2010, 33(3):40-42.
[3] 艾才云, 許樹謙, 穆總結,等. Φ311自動垂直鉆井系統技術探討[J].新疆石油天然氣, 2011, 07(1):27-30.
[4] 張 萌. 自動控向垂鉆系統小型化設計的關鍵技術研究[D].中國地質大學[武漢], 武漢,2010 .
[5] 孫 峰,呂官云,馬清明,等. 捷聯式自動垂直鉆井系統[J].石油學報,2011, 32(2):360-363.
[6] 狄勤豐, 韓來聚, 孫銘新.調制式旋轉導向系統導向力等力合成模型的建立與分析[J].石油大學學報(自然科學版), 2004,28(6): 35-37.
[7] 韓來聚, 孫銘新, 狄勤豐. 調制式旋轉導向鉆井系統工作原理研究[J].石油機械,2002,30(3) 7-9.
[8] 蘇義腦, 李松林. 自動垂直鉆井工具的設計及自動控制方法[J].石油學報, 2001.22(4): 87-91.
[9] 程載斌, 姜 偉, 蔣世全, 等. 旋轉導向系統三翼肋偏置位移矢量控制方案[J].石油學報,2010, 31(4)676-679.
[10] 吳文晉, 梁 軍, 白云新,等. 垂直鉆井系統中央控制器設計[J].石油儀器, 2012,26(1): 5-7.
Design of Vector Control Algorithmin for Vertical Drilling System
WU Wenjin1, BAI Yuxin1, CHENG Zhaojiang2, LI Yanli1
(1.ChinaAcademyofLauchVehicleTechologyNo.18ResearchInstitute,BeiJing, 100076,China;2.CNPCXIBUDrillingEngineeringCompanyLimitedDrillingTechnologyResearchInstitute,Karamay,Xinjiang834000,China; 3.DaqingOilfieldNo.5ProductionPlant,Daqing,Heilongjiang163000,China)
The ‘six-position’ control strategy is adapted in the traditional vertical drilling system due to the limitation of the hydraulic sub-system. Therefore, the resultant force pointing angle of the equipment can not accurately point to the high-side direction, and the control precision is difficult to meet the demand. In order to overcome the shortcomings of the six-position control method, a vector control method is proposed under which the output pressure of the hydraulic subsystem is controllable. The output force of each hydraulic subsystem can be calculated by vector decomposition to ensure that the resultant force of the hydraulic mechanism is directed to the high-side direction precisely. The error of the resultant force of the hydraulic sub-system is discussed when the output capacity of the hydraulic sub-system is limited. This method overcomes the shortcomings of the six-position control algorithm which cannot be precisely guided. The feasibility and reliability of the control algorithm has been verified by down-well test.
vertical drilling system; vector control algorithmin; ‘six-position’control; composition of forces; angle of composition of forces
國家科技重大專項“西部山前復雜地層安全快速鉆進技術”(編號2011ZX05021-001)。
吳文晉,男,1985年生,2010年畢業于北京航空航天大學,目前主要從事電子控制器軟硬件設計工作。E-mail:tonglifewu@163.com
TE243
A
2096-0077(2017)02-0013-05
10.19459/j.cnki.61-1500/te.2017.02.004
2014-12-08 編輯:馬小芳)
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00