管網式噴霧系統建模與壓力控制
2017-05-17 09:07:58許績彤李君牛萌萌薛坤鵬陳佳森周
江蘇農業科學 2016年1期
許績彤 李君 牛萌萌 薛坤鵬 陳佳森 周佳鑫

摘要:管網式噴霧系統在山地果園應用普遍,作業過程中噴頭數量的改變會造成管網壓力波動,從而降低霧化均勻性;為了解決系統壓力控制的快速性與準確性,在對管網系統元件數學建模的基礎上,提出了1種非線性壓力控制方法,對管網噴霧過程進行模擬分析與試驗驗證。結果表明:提出的壓力控制方法能克服模型參數時變和干擾不確定性的影響,動態響應迅速,控制精度優良,保證了霧化均勻性、農藥利用率、噴霧防治效果。
關鍵詞:管網;施藥;建模;壓力控制
中圖分類號:S49 文獻標志碼:A 文章編號:1002—1302(2016)01—0389—02
在果樹病蟲害防治中,化學防治為主要手段。由于我國大多數的果園立地條件為坡地,株行距小,且用于大田作物的噴霧機械難以在丘陵山區使用,因此作為果園管理重要環節之一的施藥作業依然處于較低的機械化生產程度,工人勞動強度大,防治效果不理想。
近年來,管網式噴霧系統因其建設施工方便、作業勞動強度小、使用維護成本低等優點而在山地果園中開始普及。該系統采用固定式管道網絡布局,利用動力噴藥機械的柱塞泵將藥液池的藥液泵入管道,再經管道輸送至果園的不同區域,工人們用軟管噴槍連接管道輸出節點,進行一定范圍內的果樹施藥。噴霧壓力是影響噴霧量、霧滴直徑的關鍵因素。噴槍開閉時間以及作業數量的隨機變化會引起管道中藥液壓力波動,進而影響藥液在目標果樹的有效沉積比例。噴頭作業數量的增加使管網負荷增加、瞬時壓力下降,降低了霧化均勻性;噴頭作業數量的減少會造成管網負荷減小、瞬時壓力升高,容易發生爆管現象。
為了解決水路系統壓力控制的快速性與準確性,國內外許多學者進行了廣泛的研究。研究表明,比例-積分-微分(PID)控制、反饋線性化控制、模糊控制、參數自整定控制、自適應控制以及魯棒控制等方法對于恒壓供水系統有較好的壓力控制效果。雖然固定管道施藥系統與城市管道供水系統相似,但是受果園建設的成本因素、管網流量規模的影響,前者系統結構較為簡化,但不確定干擾、參數變化波動較大,對于控制器的抵抗瞬時流量負荷變化能力要求較高。由于滑模變結構控制和模糊控制對于系統參數變化和外界干擾的影響均具有自適應性,因此本研究采用模糊滑模變結構控制方法設計管網式噴霧系統的壓力控制器。通過對管網主要元件進行數學建模,確定管網系統的對象模型,構建模糊滑模壓力控制器,進行變流量負荷條件的數值模擬和試驗驗證。本研究可為農業管網式噴霧系統的壓力控制器設計提供參考,對提高施藥系統的作業質量和自動化程度有應用研究意義。
1管網元件數學模型
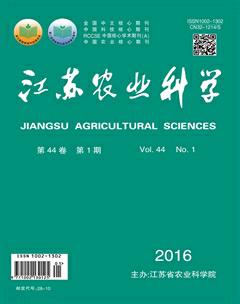
圖1為管網式噴霧系統的基本構造。藥液泵的Q-H特性曲線通常采用2次或3次多項式進行離散點的最小二乘法曲線擬合。本研究采用2次多項式表示揚程曲線,即:
3驗證分析
壓力控制試驗用的樣機來自華南農業大學研制的管網式噴霧壓力控制系統,由3.0 kW電動機、45柱塞泵、電源組件、3.7 kW變頻器、流量計、壓力變送器以及壓力控制器等部件組成,柱塞泵流量42~52 L/min,工作壓力1.0~3.5 MPa,水平射程15~18 m。試驗管網系統的主干管(DN20)長度15 m,各支管(DNl5)長度5 m,共6路支管。本試驗測試過程中只在其中的3路支管裝有噴槍,封閉其余支管。
測試方式:為模擬變流量負荷工作狀態,試驗過程中采用同時開閉支管噴槍的方式。噴霧機開啟工作后,管網的各支路噴槍全部打開。設定管網工作壓力為1.35 MPa;待管路壓力穩定后,同時關閉其中2路噴槍,保留1路噴槍仍處于開啟狀態;17.5 s后,同時開啟已關閉的2路噴槍,直至系統壓力穩定。測試過程中用數據采集儀記錄管路流量、壓力數據,采樣時間為10ms。
由圖2、圖3可知,因2路噴槍在2.5 s時被同時關閉,實際噴藥量瞬時減少,導致管網壓力大幅增加,此時壓力控制器執行降壓控制,通過管網壓力閉環反饋,降低藥液泵電動機的轉速以減少供藥液量;10 s后管路系統的供藥液量與噴藥量達到穩定值;20 s時重新開啟2路噴槍,實際噴藥量增加進而使管網壓力瞬時減小,壓力控制器執行升壓控制,通過管網壓力閉環反饋,提高藥泵電機的轉速以增加供藥液量;12.5 s后管網壓力可以恢復到1.35 MPa。
對圖4、圖5管網壓力控制試驗的實測結果進行對比可知,仿真計算的結果與試驗測得的結果趨勢基本一致,控制瞬態響應存在的差異主要是管網系統的非線性特征以及仿真計算時的參數取值誤差造成的。從圖2至圖5可看出,對于時變系統和不確定系統,模糊滑模變結構控制器具有良好的跟蹤性能和魯棒性。基于模糊規則的模糊滑模變結構控制方法可有效通過切換增益消除外界干擾和參數未知變化,同時也消除了變結構控制帶來的抖振問題,保持了良好的動靜態響應。
4結論
本研究針對山地果園管網式噴霧系統施藥過程中的壓力不穩定問題,設計了1種非線性壓力控制器。在壓力控制器的設計過程中,直接把開關函數及其微分作為輸入量,通過模糊推理獲得滑動模態控制的控制量,以消除線性化模型對系統誤差分析的影響。
基于建立的噴霧管網系統主要元件的數學模型,對施藥過程中的變負荷壓力控制進行了仿真分析。為驗證控制器的運行效果,開展了試驗研究。仿真與試驗結果表明:該壓力控制器可以滿足施藥管網壓力恒定的要求,動態響應迅速,控制精度優良。所設計的壓力控制器具有直接、簡單和可行的優點,且能保持整個系統對參數時變和干擾不確定性的穩定。