基于UWB的地下停車場車輛定位系統設計與實現
2017-05-18 17:39:34曹祥紅張華
現代電子技術 2017年9期
曹祥紅+張華


摘 要: 介紹了在地下空間中具有較強穿透力和高精度定位能力的UWB定位技術,采用基于UWB技術的DWM1000定位模塊設計了一種地下停車場車輛定位系統,介紹了定位系統的組成和測距定位工作原理,著重進行了基于正多邊形的錨節點優化布局,并在實際地下停車場中進行車輛定位性能測試,驗證了定位系統的可行性。
關鍵詞: 地下停車場; 車輛定位系統; UWB; DWM1000模塊; 錨節點; 標簽節點
中圖分類號: TN914?34; TP273 文獻標識碼: A 文章編號: 1004?373X(2017)09?0136?05
Abstract: The UWB positioning technology with strong penetration power and accurate positioning capability in underground space is introduced. The DWM1000 positioning module based on UWB technology is used to design a vehicle positioning system applied to the underground parking. The composition of the positioning system and working principle of the range?finding and positioning are introduced. The optimized layout based on regular polygon for the anchor nodes was carried out emphatically. The vehicle positioning performance was tested in an actual underground parking to verify the feasibility of the vehicle positioning system.
Keywords: underground parking; vehicle positioning system; UWB; DWM1000 module; anchor node; tag node
0 引 言
隨著城市經濟飛速發展,機動車輛保有量迅速增加,地面停車資源越來越有限,很多新建高層建筑都建立了配套的地下停車場。但由于人們對地下停車場復雜多樣的布局和停車位標志不熟悉、引導不到位等原因,使得在迷宮似的地下停車場停車難和找車難,成為駕駛者苦惱的新問題。
地面停車場一般都有成熟的停車定位導航系統,大都是結合衛星導航(GPS)實現車輛定位進而實現停車導航[1]。GPS系統是專門為實現無線導航定位功能而組建的具有特定結構的定位系統[2?3],對于信號到達較為容易的室外開闊環境,GPS可以提供米級精度的定位信息,廣泛應用于地上停車場的車輛停車定位導航系統中[4?5]。由于建筑物本身及其內部結構和設備等的影響,使得在室內和地下環境中很難接收到GPS信號,無法提供定位所需的有效信息[3]。當前大多數的地下停車場依然采用傳統的字母和數字編碼,導致在迷宮式的地下停車場里快速找到空置停車位和離開時迅速找車,還是有一定難度的。如何有效精確地對車輛進行定位,是地下停車場定位導航系統要考慮的首要問題。
UWB(超寬帶)定位是近年來發展起來的一種定位方式,一般使用的是極窄的脈沖信號或者極寬的頻譜帶寬信號進行信息的傳遞,與其他定位技術相比,主要優點是穿透能力強、定位精度高,具有厘米級的定位能力[6?8]。UWB可以在封閉的室內或者障礙物較多的情況下完成測距定位任務,即使在地下空間中性能也能得到較好的發揮[9?10]。
本文設計了一種地下停車場車輛定位系統,在地下停車場中合理配置基于UWB定位技術的錨節點,車輛進入停車場后,會獲得一張具有UWB定位標簽節點的出入卡,實現車輛位置實時定位。如果配合相應的導航系統進行路線規劃,既可準確找到空置停車位,離開時也可準確找到車輛停放位置,駕車后又可準確找到出口,并按規劃導航路線離開,有效避免迂回“巡泊”的尷尬場面,有效解決了地下停車場停車難和找車難的問題。
1 系統整體設計
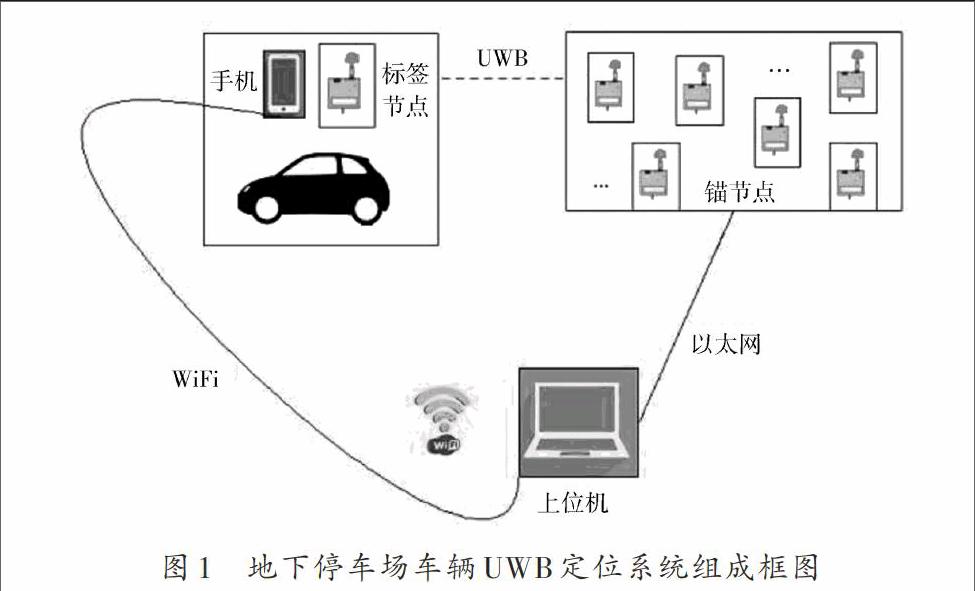
地下停車場車輛UWB定位系統組成框圖如圖1所示。包括至少三個以上的UWB定位模塊作為錨節點、一個移動的標簽節點、駕駛者手機、上位機和WiFi網絡。
地下停車場UWB定位導航系統可以劃分成兩部分:一部分是定位功能;一部分是導航功能。定位功能是導航功能的前提。定位系統的功能主要包括:車輛進入地下停車場入口處時,領取一張安裝有標簽節點的出入卡,連接停車場的WiFi,手機掃描帶有標簽節點信息的二維碼,同時上傳標簽節點ID信息到上位機;最近的三個錨節點測量與駕駛者標簽節點的距離并發送給上位機;上位機軟件根據公式可以計算出標簽節點在地下停車場空間內的坐標,上位機在電子地圖中定位標簽節點的位置,從而實現對地下停車場車輛的實時定位,進而可實現車輛路徑規劃和導航功能。
2 UWB車輛定位系統設計與實現
地下停車場超寬帶定位系統的核心就是測距定位。本系統選用DecaWave公司推出的具有實時測距定位功能的無線傳輸模塊DWM1000,采用IEEE 802.15.4?2011協議,基于到達時間差的TDOA雙向測距定位方法。一對DWM1000模塊最大理論測距為300 m,定位精度為10 cm,抗多徑和抗干擾能力強,計算復雜度低,成本低,易于實現[11]。DWM1000厘米級的定位精度可充分滿足在封閉的地下停車場空間中對車輛準確定位的需求。
2.1 測距定位方法
定位是在測距的基礎上進行的。在一個給定的參照系中,標簽節點測得它與錨節點之間的相對距離,錨節點也可以測得相互之間的相對距離,標簽節點任選部分錨節點組成一個參考系統,根據這些距離按照幾何計算方法確定自己在參考系中的位置,就叫定位[12]。定位的常用方法有基于到達時間(TOA)、基于到達時間差(TDOA)、基于到達角度(AOA)和基于接收到的信號強度的指示(RSSI)等四種[13]。這四種方法各有優缺點,其中TDOA利用時間差的信息推導計算出錨節點與標簽節點之間的距離,既具有很高的定位精度,又符合超寬帶系統時間分辨率較高的特性,系統的復雜度小,成本低[14?15]。綜合比較,選擇TDOA定位作為UWB超寬帶測距定位的方法。
基于TDOA方法的DWM1000雙向測距定位原理如圖2所示。
一對DWM1000模塊,其中,一個作為錨節點,一個作為標簽節點,雙向測距過程如下:
(1) 錨節點向標簽節點發送廣播信息,并標記開始傳輸起始時刻為
(2) 標簽節點接收到廣播信息并向錨節點發送一個回應的廣播信息,特定的響應延遲時間為(這是由標簽節點響應的時間確定的);
(3) 錨節點接收到回應信息,標記接收時的返回時刻為
2.2 UWB定位模塊通信接口
DWM1000模塊是一個低功耗、采用CMOS大規模集成電路工藝的單芯片UWB無線收發模塊,數據通信采用slave?only模式的SPI接口。模塊內部組成以及與單片機的接線如圖3所示[17]。
DW1000芯片內部集成了收發器、模式變換器、電源管理模塊、狀態控制器以及SPI接口電路。DW1000芯片與外接天線和電源模塊構成DWM1000模塊。在DWM1000模塊和單片機構成的系統中,單片機是SPI通信主機,提供串行時鐘CLK信號;DWM1000模塊被動接收CLK信號,在主機CLK信號作用下完成兩者數據交換。CS是片選信號,用于多SPI從通信設備之間的選擇。MOSI是數據輸入信號線,用于傳輸接收到的數據信號。MISO是數據輸出信號線,用于傳輸需要發送的數據信號。POL是時鐘極性控制端子,用以確定SPI總線空閑電平高低狀態。PHA是時鐘相位控制端子,用以確定在同步時鐘信號的第一還是第二個跳變沿進行數據采樣。單片機STM32F107通過SPI總線對DW1000模塊傳輸初始化、配置和測距數據,然后把收到的實時位置數據通過以太網發送到上位機進行定位計算處理。采用SPI通信接口的錨節點和標簽節點的開發電路板如圖4所示。
2.3 UWB錨節點幾何優化布局
以某建筑地下停車場為案例,總建筑面積為94.4 m×37.2 m,停車位為103個,整體布局如圖5所示。
標簽節點主要隨著駕駛者車輛沿著出入口和行車道移動,錨節點的布局要覆蓋到每一個標簽節點可能移動到的位置,以確保實時定位標簽節點的位置。錨節點配置的數量和布局直接影響到定位的精度,錨節點配置得越好,定位精度越高。采用幾何優化算法進行錨節點的布局,幾何優化算法就是對各個錨節點進行規則的布置,可以布置成正三角形、正方形、正五邊形、正六邊形等多種形狀[18]。在二維平面上,最優的錨節點配置的幾何結構是所有錨節點構成一個正多邊形,每個錨節點位于正多邊形的頂點位置[19],如圖6所示。
在二維平面上,每三個錨節點就可以定位一個標簽節點,故優先選定一個適宜的位置布置1#錨節點,然后選取錨節點之間成60°幾何角度的位置作為2#、3#錨節點,組成規則的正三角形,錨節點布局如圖7所示。
DWM1000模塊在理想條件下的理論定位距離是300 m,當布置在復雜的地下停車場環境中,因為障礙物如墻、梁柱、設備等會使信號強度有一定衰減,根據資料,確保定位精度的定位距離最保守按理論值的計算[16],可設定一對錨節點——標簽節點定位最大距離為30 m。標簽節點只要在圖7所示的邊長為30 m的正三角形范圍內運動,定位精度都可以保持在10 cm以內。據此可以求得正三角形的面積
可求出案例停車場以案例地下停車場左下角的邊界點作為坐標原點建立直角坐標系,坐標為坐標軸單位為mm。標簽節點是隨著駕駛者的車輛移動的,設其坐標為1#錨節點的位置有多種方案可以選擇,根據案例停車場的情況,將1#錨節點選取在圖8中的處。按照幾何優化法將面積為的地下停車場空間劃分成多個正三角形,最終劃分的正三角型個數錨節點布置數量如圖8所示。
3 系統功能測試
系統功能測試在圖5所示的案例停車場內進行,按照圖8劃分正三角形,放置錨節點12個,攜帶一個標簽節點的移動車輛,測試環境如圖9所示。
首先進行了一對DWM1000 標簽節點與錨節點定位模塊的測距性能測試,分別測試攜帶標簽節點的車輛行駛至不同距離時錨節點測得的距離和激光測距儀測得的距離,對比結果見表1,現場測試見圖10。驗證了在30 m以內該UWB定位模塊測距誤差在10 cm之內,滿足測距要求;測距超出30 m時,定位誤差增大,定位性能變差。
以攜帶有標簽節點的駕駛車輛由行車道駛入停車位過程為例,進行定位性能測試。車輛以5 km/h的速度行進,每隔2 m采集一次定位數據,繪制出UWB測距定位軌跡和車輛實際行駛軌跡對比如圖11所示。由于車輛在地下停車場內限速一般在5 km/h以內,降低行車速度后進行定位性能測試,與5 km/h行駛速度下測得的定位精度無明顯變化。
再模擬車輛在案例地下停車場各種不同的可能行駛軌跡進行定位性能測試。由于車輛行駛軌跡始終落在由最近的三個錨節點組成的正三角形內部,定位誤差變化很小,定位絕對誤差始終保持在10 cm以內,可滿足對車輛準確定位的要求。
4 結 語
本文介紹了基于UWB定位技術的DWM1000定位模塊的特點,通過對錨節點進行優化布局,實現了對攜帶標簽節點的地下停車場車輛的實時定位,并在實際停車場中進行了車輛定位測試,驗證了系統的可行性。地下停車場車輛定位系統如果配合相應的導航系統,規劃路線,將為駕駛者停車和取車提供便利。導航系統的構建將是下一步工作的重點。
參考文獻
[1] 王麗欣.基于GPS/GSM的車輛定位跟蹤系統設計與實現[D].沈陽:沈陽工業大學,2013.
[2] 胡天琨.基于Android的室內導航定位系統設計與實現[D].上海:東華大學,2012.
[3] 何穎.基于WLAN室內定位系統的AP快速部署算法研究[D].哈爾濱:哈爾濱工業大學,2011.
[4] 舒洪靈.基于GPS技術的車輛監控系統的設計和實現[D].成都:電子科技大學,2013.
[5] 曹永升,梁勝祥,謝冠恒,等.移動定位技術的現狀與發展趨勢[J].電子技術應用,2015,41(1):17?20.
[6] 葛利嘉.超寬帶無線通信[M].北京:國防工業出版社,2005.
[7] 邊江南.UWB室內定位算法的研究[D].南昌:南昌航空大學,2013.
[8] 安寶強,張浩,崔學榮.單基站UWB定位距離的獲得及處理方法[J].現代電子技術,2014,37(7):15?17.
[9] 鄒洪良.基于改進TDOA的超寬帶室內定位技術研究[D].哈爾濱:哈爾濱工業大學,2012.
[10] 韓笑楠.基于IR?UWB和ZigBee的TDOA定位方案[D].長春:吉林大學,2013.
[11] DecaWave. Dw1000?product?brief [EB/OL]. (2014?01?14). [2016?02?18]. http://www.decawave.com/sites/default/files/product.
[12] 鄒杰,李珊君,陳曉明.一種改進的室內無線定位算法[J].計算機工程,2011(14):76?78.
[13] 陳方曉.基于異步TOA估計的超寬帶室內定位系統的研究與實現[D].哈爾濱:哈爾濱工業大學,2012.
[14] 張忠娟.基于UWB的室內定位技術研究[D].天津:天津大學,2011.
[15] 李偉杰.基于UWB 信號室內定位系統性能優化研究[D].哈爾濱:哈爾濱工業大學,2013.
[16] YAVARI M, NICKERSON B G. Ultra wideband wireless positioning systems [R]. New Brunswick: Faculty of Computer Science University of New Brunswick, 2014.
[17] DecaWave. Sensor DWM1000 module [EB/OL]. (2014?10?16). [2016?02?18]. http://www.decawave.com/support.
[18] 白敏.基于TDOA的陸基多點定位系統設計與定位算法研究[D].重慶:重慶大學,2010.
[19] 趙仕俊,張朝暉.無線傳感器網絡正六邊形節點覆蓋模型研究[J].計算機工程,2010,36(20):113?115.
