高空柔索作業機器人的機械本體設計
2017-05-30 10:48:04劉笑辰孫漢文杜燕飛
科技風 2017年3期
關鍵詞:實驗
劉笑辰 孫漢文 杜燕飛

摘 要:針對目前高空巡檢作業工作環境差,危險系數高等問題,介紹了一種高空柔索作業機器人,利用三維設計軟件solidworks建立了機器人的虛擬樣機,最后通過實驗測試,驗證了機器人結構設計的合理性和穩定性。
關鍵詞:巡檢;機械結構;越障;實驗
隨著機器人技術的快速發展,其應用領域也越來越廣泛。將機器人技術應用到諸如索道以及高壓輸電線路等的安全檢修工作得到了越來越多的關注和研究。
本文設計了一款高空作業機器人,不僅能夠代替人工完成各項工作,而且能夠長時間、高強度的完成作業。
國外對于巡檢機器的研究取得了一定的進展,如加拿大魁北克水電研究院研制的第三代原型樣機“LineScout”[ 1-2 ]機器人,目前已應用于實際線路的檢修工作。而國內高空作業巡檢機器人的研究與國外相比存在一定的差距。目前,中國科學院自動化研究所和山東科技大學共同研制的三掌兩臂式機器人[ 3-4 ],在跨越耐張線夾取得了一定的突破,具有能夠跨越跳線和不同彎度線路的優點,但是存在總體質量大、控制比較復雜等問題。
本文提出了一種新型的三臂輪式高空柔索作業機器人。這種機器人不僅結構緊湊、重量輕,而且能夠跨越防震錘、間隔棒、懸垂線夾,以及耐張線夾等復雜障礙物。
1 高空柔索作業機器人機械本體設計及越障分析
1.1 高空柔索作業機器人設計要求
高空柔索作業機器人的設計包括機械系統、控制系統、通訊系統、檢測系統等的設計,而機械本體的設計是機器人功能實現的基礎。
為保證機器人的高空巡檢作業的穩定性,設計時,需要滿足以下基本要求:
1.1.1設備搭載能力
機器人設計時,需要具有一定的負載能力,以便攜帶檢測設備與維修設備完成對索道電纜、高架線等的檢測與維修作業。
1.1.2障礙跨越能力
為了保證高壓輸電線路的穩定以及一些功能需求,線路中往往存在防震錘、間隔棒、懸垂線夾、耐張線夾等障礙物,機器人在巡檢過程中需要具有跨越這些障礙的能力。
1.1.3爬坡能力
高壓線路桿塔之間距離的長短使輸電線存在一定的坡度,機器人要在線路上持續運行,必須具有一定的爬坡能力,其爬坡角度≤60°。
1.2 高空柔索作業機器人機械本體組成
通過對國內外高空作業機器人的研究現狀分析以及高空巡檢作業環境和任務的功能定位,設計了一款三臂輪式柔索作業機器人,其本體結構分為前、后臂、中臂以及控制箱體四大部分,如圖1所示。其中前后臂結構設計相同,具有行走機構、豎直伸縮機構、擺臂機構以及底座旋轉機構組成。中臂為輔助驅動臂,由行走機構、豎直伸縮機構組成。
機器人巡檢作業過程中的行走方式主要有攀爬式和輪式[ 5,6 ]。由于攀爬行走方式存在速度慢、效率低、重心不穩等問題,而輪式結構克服了這些缺點,并且在巡檢過程中對導線的損害低、行走可靠穩定,因而行走機構的設計采用輪式結構。
行走輪主要由驅動半輪、輔助半輪、絲杠、同步帶輪等組成,如圖2所示。行走輪選用的聚氨酯材料,具有性能穩定、絕緣、壽命長的優點。其行走機構采用的不對稱開合式結構,開合電機通過絲杠螺母滑塊機構實現大、小半輪的開合運動,大小半輪移動距離比為2:1,總行程為80mm。其中大半輪具有和輸電線路相仿的凹形溝槽,增大了輪子與導線之間的接觸面積。輪式開合式結構具有很多的優點,不僅能夠提高機器人的越障效率,而且保證了機器人巡檢過程的穩定,避免因外界環境的變化引起機器人脫線的危險。
1.3 引流線越障過程分析
由于引流線路(跳線)比較復雜,而且空間形狀、布局差別很大,因而這一跨越過程通過監控視頻與手動操作完成。當前臂遇到引流線時,手臂的脫線與抓線方式和直線段相同。首先,前臂行走輪脫線,中臂和后臂驅動機器人行走,當中臂接近引流線時,調整手臂姿態,使前臂行走輪抓住引流線。中臂行走輪脫線,前后臂驅動前進,直至后臂接近懸垂線夾,調整前后機械臂使中臂行走輪抓住跳線。后臂行走輪脫線,機器人繼續前行,當后臂通過懸垂線夾后,調整前、中臂使后臂抓住跳線,完成整個跳線段的越障。
2 實驗驗證
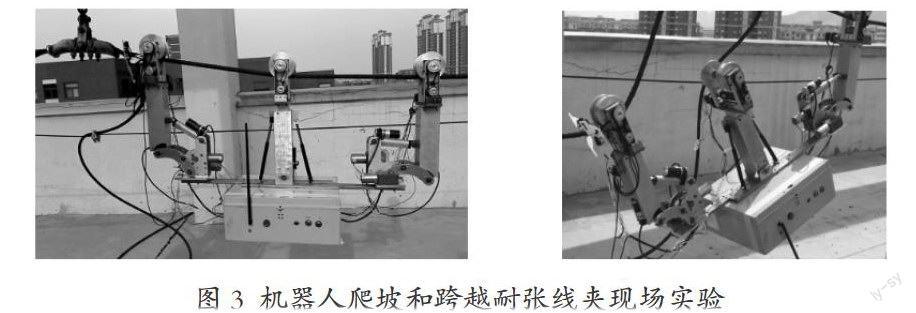
為進一步驗證機械機構的可行性,制作機器人物理樣機,在模擬線路中進行了機器人爬坡和引流線跨越的實驗驗證,如圖3所示。
3 結論
模擬機器人工作環境,對機器人進行現場實現,驗證了機器人能夠穩定可靠地跨越線路、電纜索道上的障礙,為機器人在高空中的實際應用提供了依據。
參考文獻:
[1] Pagnano A, Hopf M, Teti R. A roadmap for automated power line inspection.Maintenance and repair[C].In Proceedings of 8th CIRP Conference on Intelligent Computation in Manufacturing Engineering.Germany,Stuttgart,2013:234-239.
[2] Montambault S,Pouliot N.Design and validation of a mobile robot for power line inspection and maintenance[Z].2007.
[3] Xiao Xiaohui, Wu Gongping.Dynamic simulation and experimental study of inspection robot for high-voltage transmission-line, Journal of Central South University of Technology,2005(6):726-731.
[4] 丁鴻昌,王吉岱,楊前明,等.高壓輸電線路自動巡檢機器人的研制與開發[J].現代制造技術與裝備,2006(4):10:12.
[5] 連金玲.氣動式輸電線路除冰機器人機械本體研究[D].青島:山東科技大學,2012.
[6] 蔡自興.機器人學[M].北京:清華大學出版社,2000.
作者簡介:
劉笑辰(1990-),男,漢族,山東棲霞人,碩士,山東科技大學機械電子工程學院,動力工程專業先進過程裝備技術方向;
孫漢文(1995-),男,漢族,山東棲霞人,本科,山東科技大學機械電子工程學院,過程裝備與控制工程專業;
杜燕飛(1994-),男,漢族,山東菏澤人,本科,山東科技大學機械電子工程學院,過程裝備與控制工程專業。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
