基于AT89C51單片機的步進(jìn)電動機控制器硬件設(shè)計
2017-05-30 23:23:20劉勇張宇亭王碩
科技尚品 2017年2期
關(guān)鍵詞:單片機
劉勇 張宇亭 王碩

摘 要:文章闡述一種基于51單片機的步進(jìn)電動機控制器設(shè)計,同時著重研究其細(xì)分驅(qū)動技術(shù)并建立了細(xì)分驅(qū)動參考電流波形的產(chǎn)生的函數(shù)表達(dá)式。設(shè)計過程中采用電流追蹤型PWM法細(xì)分驅(qū)動技術(shù)。通過細(xì)分模型分析和建立設(shè)計了一種兩相混合式步進(jìn)電動機驅(qū)動器。并以驅(qū)動器的硬件原理圖為基礎(chǔ),分別闡述了每個模塊的工作原理。
關(guān)鍵詞:步進(jìn)電動機;細(xì)分驅(qū)動;單片機
1 步進(jìn)電機及其發(fā)展
步進(jìn)電機又稱脈沖電機或者階躍電動機,國外一般稱之為step motor或者stepping motor、pulse motor等等。其應(yīng)用發(fā)展已有約80年的歷史。步進(jìn)電機只有周期性的誤差而無累積誤差,精度高,步進(jìn)電動機可以在寬廣的頻率范圍內(nèi)通過改變脈沖頻率來實現(xiàn)調(diào)速、快速起停、正反轉(zhuǎn)控制等,這是步進(jìn)電動機最突出的優(yōu)點[1]。
步進(jìn)電機也在軍用儀器,通信和雷達(dá)設(shè)備,攝影系統(tǒng),光電組合裝置,閥門控制,數(shù)控機床,電子鐘,醫(yī)療設(shè)備及自動繪圖儀,數(shù)字控制系統(tǒng),工控機控制,程序控制系統(tǒng)以及許多航天工業(yè)的系統(tǒng)中得到應(yīng)用[2]。因而,對于步進(jìn)電機控制的研究也就顯得尤為重要了。
2 兩相混合式步進(jìn)電機工作原理
2.1 基本結(jié)構(gòu)及工作原理
混合式步進(jìn)電機其典型結(jié)構(gòu)主要由定子和轉(zhuǎn)子組成。當(dāng)定子的兩相繞組按A-B-(-A)-(-B)的順序通電時,磁通Φ1經(jīng)永磁體→第一段轉(zhuǎn)子鐵心→氣隙→定子鐵心→氣隙→第二段轉(zhuǎn)子鐵心→永磁體形成閉合回路,使電機轉(zhuǎn)動。
2.2 通電方式
本設(shè)計使用細(xì)分通電方式,而兩相混合式步進(jìn)電機共有4種供電方式:單四拍、雙四拍、單雙八拍及細(xì)分通電方式。
2.3 步進(jìn)電機的運行特性
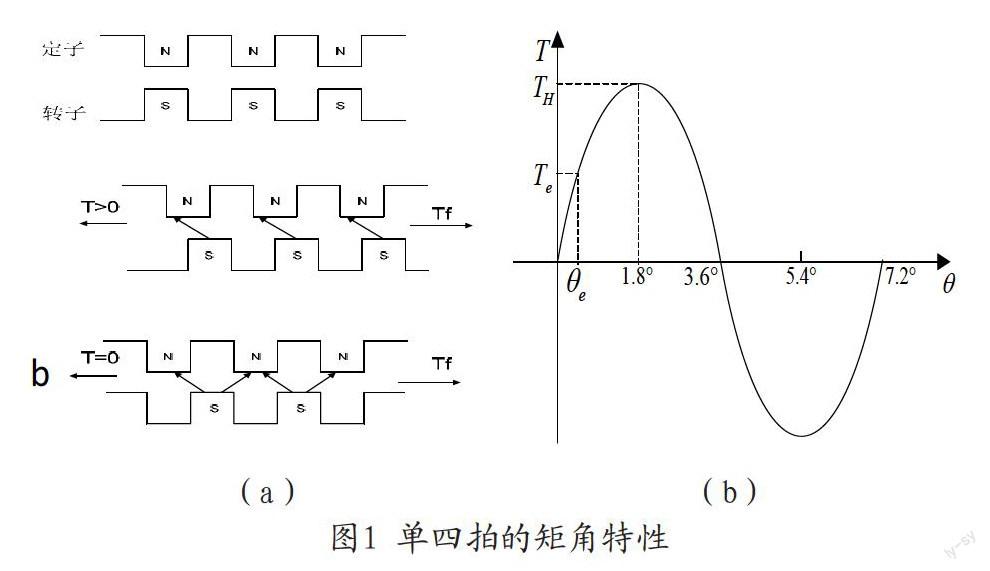
2.3.1 矩角特性
2.3.2 矩頻特性
矩頻特性最重要的特點是電機產(chǎn)生的力矩隨電機速度的升高而逐漸下降,其決定了步進(jìn)電機不適宜高速運動。
3 細(xì)分驅(qū)動系統(tǒng)硬件設(shè)計
3.1 單片機控制單元
3.1.1 AT89C51單片機
本設(shè)計選擇了AT89C51。
3.1.2 復(fù)位電路
當(dāng)RESET出現(xiàn)2個機器周期以上的高電平,執(zhí)行復(fù)位。復(fù)位電路如圖4。
3.1.3 晶振電路
單片機芯片內(nèi)部的高增益反相放大器與片外晶體振蕩器CRYS和微調(diào)電容Cl、C2,形成反饋電路,構(gòu)成一個穩(wěn)定的自激振蕩器。其中CRYS為12M晶體,C1、C2取30PF。
3.2 D/A轉(zhuǎn)換電路
DA/轉(zhuǎn)換電路主要由兩片DAC0832及兩片OP07運放組成,接線方式和引腳排列見圖5,RP52為用來調(diào)節(jié)輸出電壓的大小。RP53也是用來調(diào)節(jié)OP07的零點。
3.3 SPWM產(chǎn)生電路
如圖2,Tl494采用單端射極輸出方式,5、6腳產(chǎn)生的鋸齒波控制PWM的動作快慢和電流閉環(huán)反饋系統(tǒng)零極點進(jìn)行補償,其取值與電機內(nèi)部參數(shù)有關(guān),太大會使PWM動作太快出現(xiàn)電流異常尖峰,而太小會失去了微步切換的跟隨程度。
3.4 信號邏輯綜合電路
邏輯綜合分配電路由一片GALI6V8邏輯門陣列和一片ULN28O3邏輯反相功率驅(qū)動芯片完成。邏輯綜合分配電路的輸入信號為雙路PWM信號SPWM-A,SPWM-B,A、B兩相功率管控制信號AC、BC并導(dǎo)通控制方向信號DIR-A、DIR-B。這些信號經(jīng)過一定的工作,使電機運轉(zhuǎn)。
3.5 功率驅(qū)動與H橋電路
開關(guān)管選用MOSEFT(IRF54O),用晶體管IRF54O作功率器件并組成H橋電路。
3.6 電源電路及過流保護(hù)電路
3.6.1 電源電路
電源電路采用三端集成模塊LM7812C×2、LM7815C、LM7805C芯片為系統(tǒng)的芯片供電,由變壓器出來的直流電壓經(jīng)過濾波電機繞組供電。
3.6.2 過流保護(hù)電路
當(dāng)精密電阻從驅(qū)動橋上采集反饋回來的相電壓的值一個或者兩個超過被比較電壓時,LM393輸出低電平經(jīng)過與門電路,產(chǎn)生關(guān)斷信號SD,電機停止工作。
4 總結(jié)
研究成果及其不足:(1)實現(xiàn)了電流追蹤型SPWM細(xì)分驅(qū)動技術(shù),推導(dǎo)出了細(xì)分電流參考波形產(chǎn)生的方程,設(shè)計出了步進(jìn)電機的驅(qū)動原理圖。(2)使用的51單片機有一定運算速度和處理能力限制。DAC的精度不高。
參考文獻(xiàn)
[1]程樹康.步進(jìn)電動機及其驅(qū)動控制系統(tǒng)[M].哈爾濱工業(yè)大學(xué)出版社,1997.
[2]彭樹生,周旋.基于PIC16F876的步進(jìn)電機細(xì)分驅(qū)動電路設(shè)計[J].計算機測量與控制,2004,12(1):79-82.
(作者單位:江蘇省徐州市中國礦業(yè)大學(xué)徐海學(xué)院)
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設(shè)計工程(2015年15期)2015-02-27 12:07:30
電子設(shè)計工程(2015年8期)2015-02-27 12:05:36
