小型多用途球形無人車的研發
2017-05-30 10:48:04李軒
科技風 2017年14期
李軒
DOI:10.19392/j.cnki.16717341.201714026
摘要:小型多用途球形無人車基于球形機器人設計原理技術,適用于狹縫、管道、等特殊環境的偵查和作業。實現了球形無人車的普遍性使用的改造,解決了球形無人車成本高、技術門檻高、任務適應性差等難題。
關鍵詞:多用途;球行無人車;研發
球形無人車外形呈球體,或高度近似球體的橢球體。球形無人車的運動執行機構、傳感器、控制器、能源裝置安裝在一球形殼體內。大多數球形機器人的驅動系統位于球殼(或球體)內部,通過內驅動方式實現球體運動的。
球形無人車的研制難點在于,其基礎理論還不夠完善,技術層面處在起步階段。在技術層面,其研制主要面臨驅動模塊設計、姿態感知與控制、任務平臺設計等幾個方面的困難。
球形無人車外形獨特,隱蔽性欺騙性極高。同時擁有獨特的環境與地形適應能力,能夠適應管道、裂縫、高濃度氣體與液體等地型與環境,相比傳統機器人具有獨特的優勢。
球形無人車在受到外界干擾后,姿態恢復能力較強。地面接觸面積較小,阻力小噪音低,能耗小,效率高,是一種高效的機械。
另外,隨著科技水平的發展。還出現了一些針對某些行星微重力環境而設計的跳躍式球形機器人,這類機器人依靠電磁鐵吸引釋放驅動配重實現球形機器人的跳躍式行進。其機動性強、探測范圍廣、能耗低,非常適合對微重力行星進行環境探測。
目前,傳統履帶式或輪式機器人大多難以勝任管道、狹縫等特殊工作環境。導致許多探測工作不得不使用其他成本更高、更為復雜的探測技術完成。基于以上情況,設計一種便攜式球形無人車。利用異形優勢,可勝任管道、狹縫等特殊環境的行走工作需求。能廣泛應用與偵查、勘測、災害救援等各個領域。具有很強實用性。為了實現上述功能,基于異形機器人原理技術,設計開發了多用途求形無人車。
為了實現以上目標,我們先后嘗試了球殼內四輪差速小車驅動平臺、雙輪自平衡車驅動平臺。但此類平臺對殼體與車輪、撐桿萬向輪的配合精度要求較高。不利于進行快速定制。為了實現快速定制化設計制造,我們果斷選擇了較穩妥的電機直接驅動球殼,利用配平配重偏離中軸線產生的偏轉力矩與反扭矩驅動其完成專項動作。
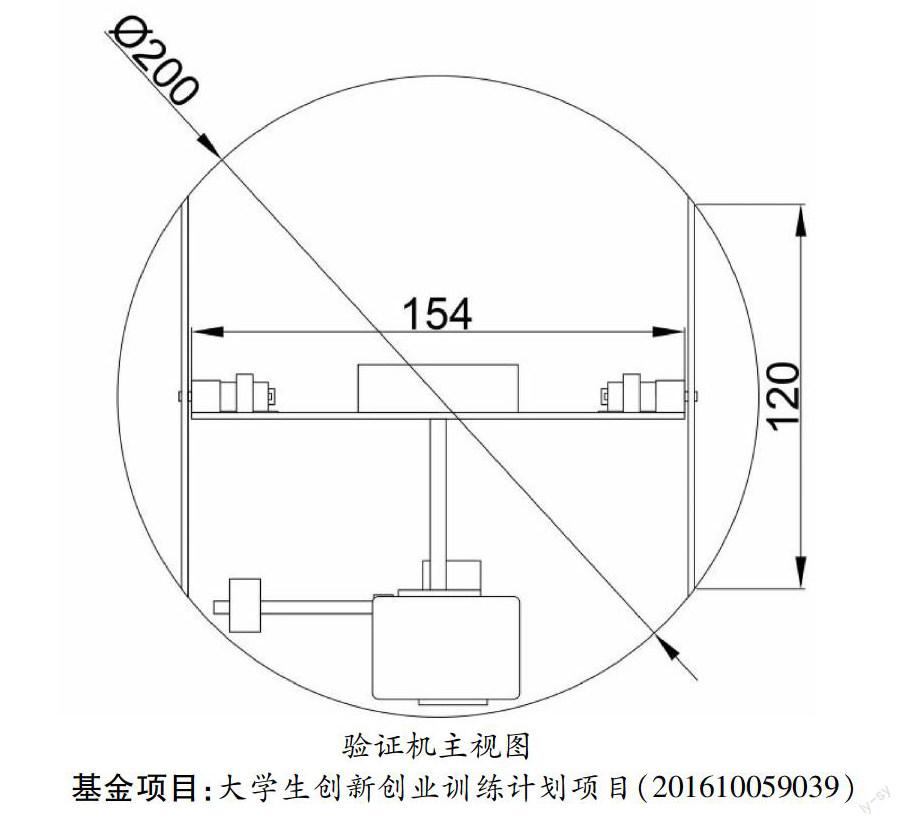
由此,球形無人車主要由圓形電機固定片、驅動電機、控制模塊或電子調速器、指向隨動設備支架、連桿、轉向伺服舵機、轉向配重支架、轉向配重、電池、通信與接收模塊、殼體與電機固定支架等組建構成。球形車運行時由電機驅動球殼運動,伺服舵機驅動轉向配重架調節轉向配重的位置,利用轉向配重旋轉時產生的反扭矩以及車輛重心的變化實現車輛的轉向。所有設備均安裝在可拆開球形殼體中,車輛外觀整潔利于車輛的隱蔽偽裝等。
另外此種球形無人車還擁有較高的模塊化設計制造能力,針對不同外形與尺寸的球殼,僅需改裝轉向配重支架與指向隨動設備支架的尺寸即可完成內部工作模塊與球形殼體的較好匹配。針對增加內部設備帶來的重量與重心變化,僅需修改配重的重量即可實現無人車的流暢運動。
新型球形無人車尺寸小、成本低、模塊化程度高、工作可靠、適用于管道、裂縫等多種特殊環境與地形,具有廣闊的發展前景。
驗證機主視圖
基金項目:大學生創新創業訓練計劃項目(201610059039)