靶載光電脫靶量測量系統設計
2017-06-01 11:29:30李桂芝鄭重商國勇
長春理工大學學報(自然科學版) 2017年2期
李桂芝,鄭重,商國勇
(1.92941部隊91分隊,葫蘆島 125000;2.91202部隊,葫蘆島 125000)
靶載光電脫靶量測量系統設計
李桂芝1,鄭重1,商國勇2
(1.92941部隊91分隊,葫蘆島 125000;2.91202部隊,葫蘆島 125000)
針對靶場試驗需求,在靶船上設計了脫靶量測量系統。基于雙站交會測量方法,采用4臺高速攝像系統,將其分別布置在靶船的艏艉,實現方位360°周視成像;不同作用距離下對成像大小進行了計算,得出在50m作用距離下,最小交匯角達10°時,交會測量誤差不大于3m;計算了靶船搖擺帶來的系統誤差。該系統實現了對試驗中目標著靶末段落點偏差測量。
靶船;光電測量系統;脫靶量;測量精度
目前脫靶量一般采用兩臺經緯儀交會測量的方法,雖然經緯儀脫靶量測量采用基于同幀畫幅處理的原理,可抵消一部分系統誤差,但是,實際試驗中靶點都距經緯儀較遠,并且受海面復雜氣象條件的影響,造成目標圖像成像質量較差,導致中靶點的圖像判讀誤差都很大。再加上經緯儀基于測角原理設計,隨著距離的增大,脫靶量測量誤差必然增大。其次,傳統經緯儀基于事后數據處理方式設計,實時性差,不能滿足當前高效率、短周期的試驗要求,因此,針對以上問題,提出了一種利用四個圖像傳感器完成近距離測量脫靶量系統的設計方案[1,2]。“靶載光電脫靶量測量系統”基于可視化定位技術、高速攝像技術、實時多模式存儲技術以及遠程無線傳輸技術,采用四傳感器交會測量方式,對目標著靶過程的實況景象進行高速成像和記錄;可根據獲得的圖像數據處理出目標與靶心的偏差量。
1 系統設計方案
系統主要由高速可見光相機、等角投影光學鏡頭、視頻存儲及輸出分系統、時統分系統、近程綜合管理分系統、遠程控制分系統、數據處理分系統、電源分系統等組成,系統組成如圖1所示。靶船為長方形結構,在其前后有兩座桅桿,用于安裝和固定測量系統的兩臺攝像機,兩臺攝像機相互交會實現對著靶區域景象全覆蓋。
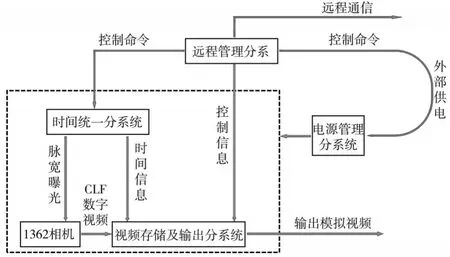
圖1 系統組成示意圖
2 測量方法
2.1 兩站交會處理測量目標坐標
垂直于船首船尾的縱向上各布置一臺成像測量站,每臺成像測量站的視場角為180°×180°,兩個測量站光軸都指向對方,試驗前將每臺測量成像系統進行標校后進行測量。建立靶船坐標系:原點為靶船中心桅桿與甲板交點,以船尾指向船首為x軸,垂直向上為y軸,z軸與x軸,y軸成右手坐標系,以靶船坐標系為運算坐標系進行后續處理,D為成像測量系統距離甲板的高程,P1/T1、P2/T2分別為船艏、船艉成像測量系統的觀測視線。布站與測量示意圖如圖2所示:
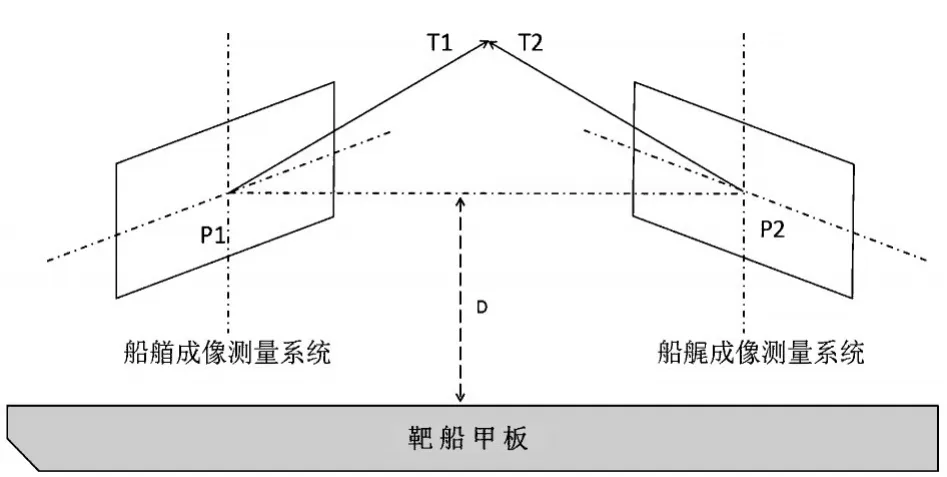
圖2 布站與測量示意圖
對事后圖像進行判讀,獲得目標的像面脫靶量(x,y),然后按照下式進行目標角度合成計算:
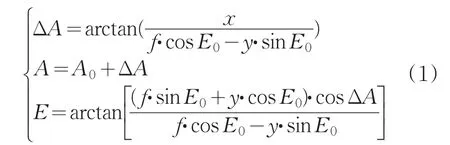
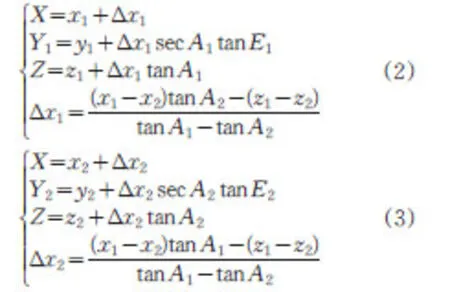
式中,x,y為目標的像面脫靶量,f為光學系統焦距,經過標校安裝后A0,E0都可確定。根據各站的站址坐標(x1,y1,z1),(x2,y2,z2),按照光測設備中常用的空間目標交會處理方法進行交會處理得到目標在所建立的靶船坐標系下的三維坐標(X、Y、Z),水平投影公式如下:
2.2 控制點設計
控制點用于對測量相機進行標定,其設計的合理性將影響實際應用中有關誤差的標校,對后續數據處理帶來誤差[3,4]。將控制點設置在靶船的桅桿和兩個煙囪上,通過控制點的高低與水平搭配實現對每一個相機的精確標定和其誤差量的測量。
3 測量指標分析
3.1 成像大小分析
根據前面設計知所采用鏡頭為等角鏡頭,其視場為180°×180°,鏡頭的成像靶面覆蓋為12.3mm× 12.3mm,高速相機的像元尺寸為14μm,那么單個像素的視場覆蓋為:

即單個像素對應的視場為0.2°×0.2°。則其在距離L處的視場覆蓋為:

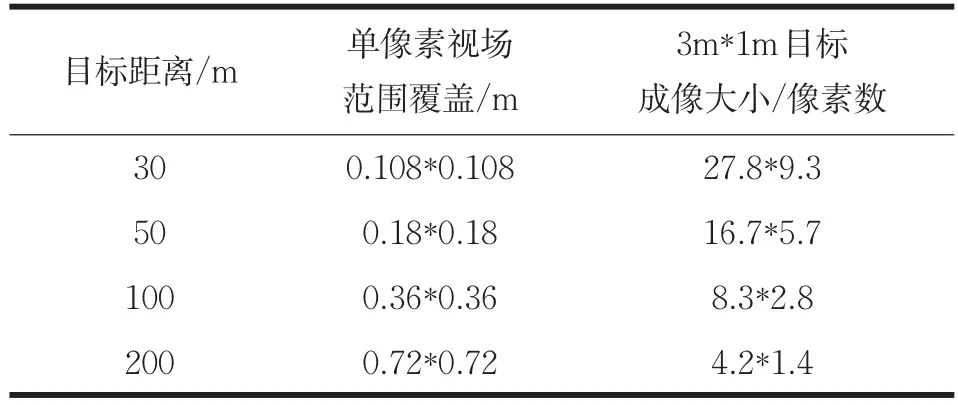
表1 目標成像大小分析
根據上表知,在距離30m處3m×1m的成像大小達到了27.8×9.3個,在距離100m處,3m×1m的成像大小達到8.3×2.8個,在距離200m處,3m×1m的成像大小仍達到4.2×1.4個。
3.2 測量精度分析
理論上交會測量時:兩線交會角為90°最好,交會精度最高,交會角越大(或越小),交會精度越差[5,6]。測量精度公式如(6)所示:
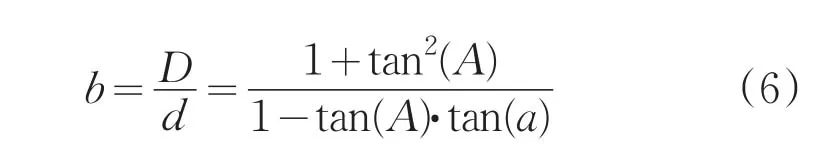
其中,a為系統的測角誤差;d為交會角為90°時,系統誤差產生的交會誤差;D為交會角為90°±A時,系統誤差產生的交會誤差。在不同的測量距離和不同的交會角度下誤差如表2~4所示(當判讀精度為0.5個像素,即0.1°):
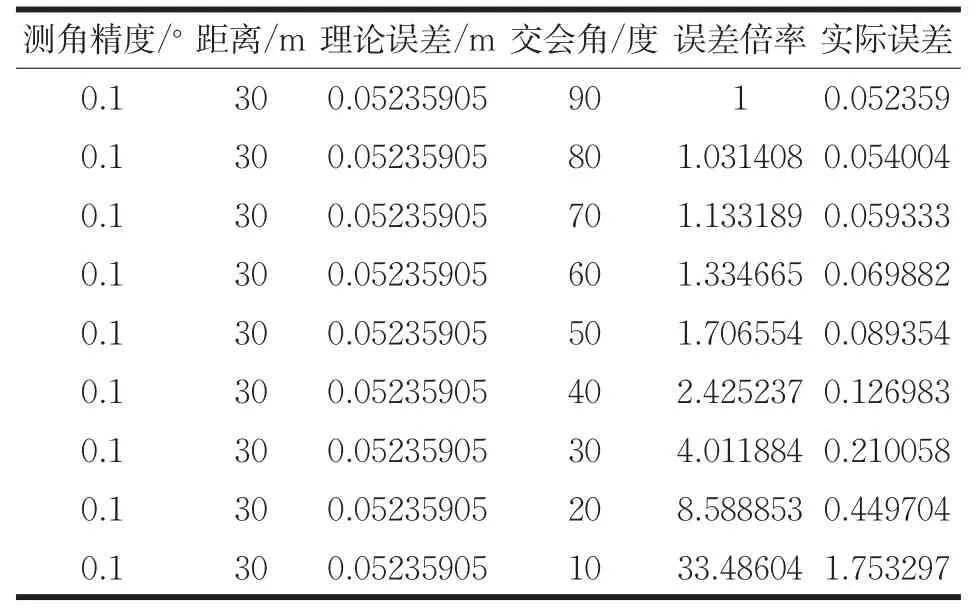
表2 測量距離30m情況下的測量精度
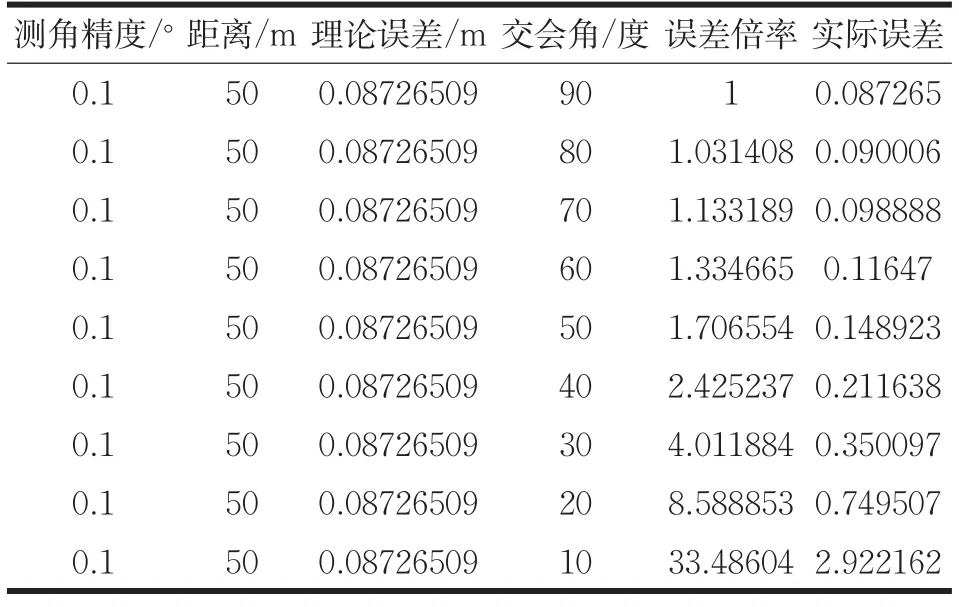
表3 測量距離50m情況下的測量精度
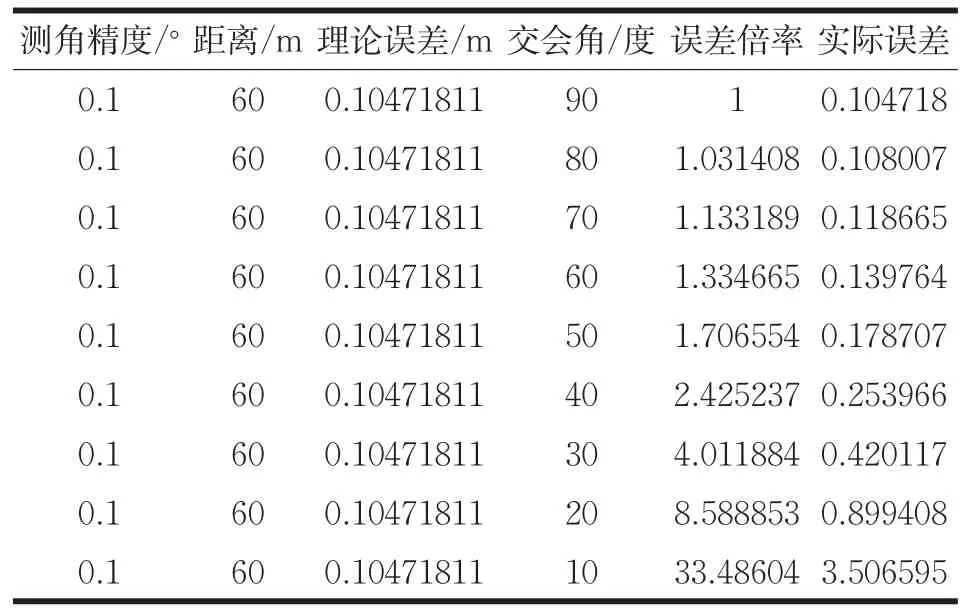
表4 測量距離60m情況下的測量精度
根據誤差分析可知,只有在交會角度為10°時交會誤差較大,但在50m測量范圍內仍能滿足3m的精度要求。
3.3 坐標系轉換
靶船水平坐標系的定義為:以靶船甲板的中心為原點(與靶船坐標系的原點重合),以船尾指向船頭為x軸正向,以在水平面內、垂直于x軸向左方向(迎著x軸看)為z軸,y軸垂直與水平面向上,x軸,y軸,z軸成直角右手坐標系。根據定義知,在實際中,將靶船坐標系通過兩次旋轉可以與靶船水平坐標系重合;將靶船坐標系繞z軸旋轉a(以逆時針旋轉為正),使靶船坐標系x軸與靶船水平面坐標系的x軸重合,a角為船的前后搖擺角度;將靶船坐標系繞x軸旋轉b(以逆時針旋轉為正),使靶船坐標系的z軸與靶船水平坐標系的z軸重合,b角為船的左右搖擺角度。假設靶船坐標系用(x′,y′,z′)表示,靶船水平坐標系用(x,y,z)表示,則有:
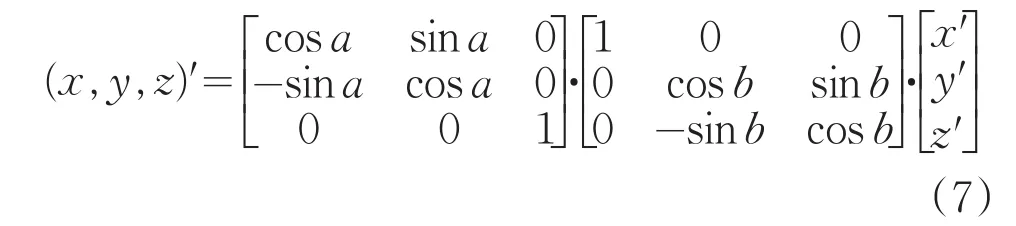
靶船搖擺帶來的影響:相機的工作幀頻為500fps,假設靶船的左右搖擺速度為5°/s,前后搖擺假設為0°,則兩幀間靶船的搖擺角度為b=5×3600/ 1000×2=36″。
4 結論
設計的靶載光電脫靶量測量系統,采用四臺幀頻為500Hz的高速攝像機,實現對高速運動目標的精確測量,在作用距離不大于50m的情況下,測得目標落點偏差測量精度小于3m,最小交匯角可達10°,在極端情況下還可采用單站測量實現目標著靶的脫靶量測量。因此,該系統具有高速、高精度、低盲區和全向探測等優點,能夠完成試驗中靶實況和脫靶量的測量任務,滿足試驗鑒定對脫靶量測量提出的實時性強、視場大、精度高的新需求。
[1]張三喜.彈道特征參數攝像測量[M].北京:國防工業出版社,2014:12-70.
[2]何照才,胡保安.光學測量系統[M].北京:國防工業出版社,2002:40-66.
[3]張博,段錦,景文博.基于CCD的光學測角精度檢測方法[J].長春理工大學學報:自然科學版,2010,33(4):55-57.
[4]王喜軍,王軍,楊會玲,等.基于多CCD拼接相機測角精度檢測[J].長春理工大學學報:自然科學版,2005,28(4):36-38.
[5]閆海霞,劉巖俊,王東鶴.大視場紅外光電經緯儀精度標定[J].紅外與激光工程,2015,44(3):832-836.
[6]劉利生.外測數據事后處理[M].北京:國防工業出版社,2000:230-257.
Design of Photoelectric Miss Distance Measurement System Based on Target Ship
LI Guizhi1,ZHENG Zhong1,SHANG Guoyong2
(No.92941 Unit of PLA,Element 91,Huludao 125000;No.91202 Unit of PLA,Huludao 125000)
According to the test requirements of target range,a photoelectric miss distance measurement system was designed on the target ship.Based on the method of double station intersection,the azimuth 360°panoramic imaging was realized by using 4 high-speed video cameras arranged on the starboard of the target ship.The image size was calculated in different action distance,it was concluded that the minimum intersection angle was 10 degrees under the action distance of 50m and the intersection mea?surement error was not more than 3m.The error was calculated caused by the target ship swing.The measurement of the terminal target point deviation can be realized by the system in experiment.
target ship;photoelectric measure system;miss distance;measurement accuracy
TH741
A
1672-9870(2017)02-0057-03
2016-11-02
李桂芝(1967-),女,碩士,高級工程師,E-mail:331964015@qq.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
