基于粗糙集的工業過程故障監測方法研究
2017-06-01 12:24:00劉豐年
商丘職業技術學院學報 2017年2期
劉豐年
(三門峽職業技術學院,河南 三門峽 472000)
?
基于粗糙集的工業過程故障監測方法研究
劉豐年
(三門峽職業技術學院,河南 三門峽 472000)
針對傳統故障監測方法模型建立難、誤報率高的問題,結合工業過程的非線性特點,提出了一種基于粗糙集的工業過程故障監測方法.該方法將基于概率分布的混合決策表離散化方法及基于分明矩陣和約簡樹的增量式屬性約簡方法應用于工業過程狀態監測中,闡述了工業過程知識獲取、狀態監測和監測性能評價方法.這種監測方法在一定程度上提高了工業過程狀態監測的效率和精度,具有一定的實際應用價值.
粗糙集;工業過程;故障監測
0 引言
伴隨著工業4.0時代的到來,工業系統的智能化、復雜化程度越來越高,其故障率也隨之越來越高.因此,人們把注意力更多地放到了工業系統的穩定性和可靠性上.為了保持系統的運行比較穩定,一些能夠對工業系統實時監測的可靠有效的措施應該被采取,以便第一時間發現故障并進行修復.但由于復雜工業過程的故障多種多樣,這就要求我們一定要分清故障類型,從而有針對性地選擇合適的監測方法.
常用的故障監測方法有3種,它們分別是基于解析模型、基于信號及基于知識推理的故障監測方法[1]11-18.如果對系統運行機理比較熟悉,數學解析模型可以準確地被建立,我們就可以利用基于解析模型的方法來監測系統運行中可能出現的故障,但一般情況下,系統的數學模型很難建立,因此這種基于解析模型的方法很難在復雜工業過程中實施.當我們可以及時準確地采集到各部件的信號時,就可以使用基于信號的故障監測方法,該方法在監測系統故障時主要利用2項技術,一是信息融合技術;二是信號處理技術.要想通過基于信號的故障監測方法準確找到故障點和信號之間的關系,就必須詳細了解系統的運行機理[2]541-545.基于知識推理的故障監測方法雖然不需要建立數學解析模型,但是要依據專家經驗,并且要用機器學習和知識推理工具,進而達到人工診斷的目的.那些非線性動態復雜系統的故障監測通常要采用該方法.但是此方法也存在故障特征提取困難,相關數據處理復雜等問題[3]11-16.
針對上述各種故障監測方法存在的問題,結合現代復雜工業過程的特點,本研究將基于概率分布的混合決策表離散化方法[4]175-178及基于分明矩陣和約簡樹的增量式屬性約簡方法[5]125-129用在復雜工業過程狀態監測中,闡述了知識獲取、狀態監測和監測性能評價方法.這種監測方法在一定程度上提高了復雜工業過程狀態監測的效率和精度.
為了便于知識獲取和故障監測,本文做如下設定:假設系統正常運轉,信號樣本用U=(x1,x2,…,xn)表示,系統運行的某個狀態用qi表示,那么系統運行狀態集合可記為Q=(q1,q2,…,qn).假設系統有m個故障源,用pi表示第i個故障源信號,那么用P=(p1,p2,…,pm)表示該系統故障源信號的集合.
1 工業過程運行狀況知識的獲取
為準確監測復雜工業過程的故障點,就必須實時準確的監視工業過程的運行狀況.基于粗糙集的相關理論,可以按照下面的步驟進行工業過程的信息采集和知識獲取:
1) 構造故障監測決策表,決策表構造后,其中的條件信號是故障源信號,系統運行狀態信號作為決策屬性,然后采用基于概率分布的混合決策表離散化算法進行離散化處理,表1為處理后的決策表.
2) 去除決策表1中的不相容及冗余樣本.
3) 對表1中的冗余屬性進行約簡處理,去除冗余屬性的方法利用的是基于分明矩陣和約簡樹的增量式屬性約簡算法.
4) 進行樣本值約簡處理,決策表的離散化直接決定著知識獲取的準確度和精度,它是基礎性的工作,因此離散化處理不但要減少屬性個數,而且要盡可能減少有用信息的丟失.為了便于推理判斷,決策規則必須采用邏輯語言的形式進行表示.
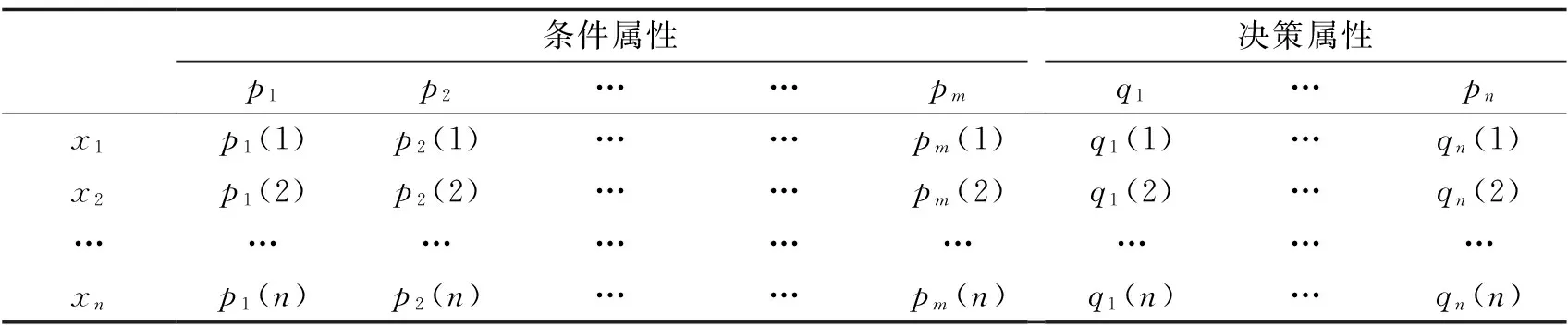
表1 故障監測決策表
2 工業過程故障點的知識獲取
一般情況下,有2種得到工業過程故障點知識的方法,分別為單點和多點故障的知識獲取法.具體要采用哪種方法,還要根據實際工業過程的實際狀況來合理確定.
1)單點故障
表2為單點故障源的故障監測表,其中用Di={pi}表示一個故障源的決策屬性集,剩下的信號和系統狀態信號Ci={p1,p2,…,pi-1,pi+1,…,pm,q1,q2,…,qn}表示決策表的條件屬性.依據表2的形式,將由DCS機隨機采集到的原始狀態數據組成m個決策表,同時依據基于分明矩陣和約簡樹的增量式屬性約簡算法對m個決策表進行知識獲取,就會得到單點故障源的監測規則.采用基于分明矩陣和約簡樹的增量式屬性約簡算法對每個決策表約簡之后都可以得到故障源pi的一組故障監測正向規則集.依此規則集,可以觀察到故障源pi的狀態和其他故障源工作狀況信號的關系.所以,判斷某個樣本是否存在故障的方法為:拿某個樣本與該故障監測規則進行比對,若與該點的某條監測規則矛盾,則證明這個點是故障點,同時依據矛盾的規則判斷出現故障點的原因是什么,如果和這個點的所有監測規則都差不多,則表明該點工作正常,沒有故障發生.

表2 故障源信號pi的故障監測決策表
2) 多點故障
目前,現代工業過程更加復雜,系統在運行中,通常會出現多點故障.可以利用構造單源故障決策表的方法來構造多點故障源決策表.假設同時考慮信號源pi和pj的工作狀況,則選擇條件屬性Cij={p1,p2,…,pi-1,pi+1,…,pj-1,pj+1,…,pm,q1,q2,…,qn},決策屬性為Dij={pi,pj},就可以構造出聯合故障監測決策表(見表3).
為了獲得故障點知識,可以把混合故障源信號進行分解,因此對混合故障源信號知識的獲取方法同單點故障源信號知識獲取的方法相同.

表3 故障源信號pi和pj的聯合故障監測決策表
3 工業過程故障監測的步驟
上述故障監測規則是指在正常情況下故障信號和系統工作情況信號間的對應關系,即給出某一個故障點在其他故障信號及系統工作狀況信號的某種“狀態組合”下該點的信號值.由于總可以將故障決策表的各決策屬性組合成為一個決策屬性,因此筆者僅討論對某一個復雜系統運行狀況進行監測的情況.
根據復雜工業過程的運行狀況和DCS機采集到的數據,構造故障監測的信息系統決策表.用S=(U,R,V,f)表示信息系統決策表,R=C∪D,C∩D=Φ,C={p1,p2,…,pm}是故障源信號組成的條件屬性集,D={q}是復雜工業過程運行狀態信號組成的決策屬性集.采用合理的屬性約簡算法對S=(U,R,V,f)進行屬性約簡處理,最終可以得到故障監測決策規則θc→ψd,其中:θc=(p1,vp1)∧(p2,vp2)∧…∧(pm,vpm),ψd=(q,vq).
因故障監測決策規則有協調性的特點,則復雜工業過程運行狀態信號的一個取值和系統故障源信號的某個狀態組合的對應關系表示一條決策規則,反過來,幾個系統故障源的某種狀態組合代表著一個系統運行狀態信號的取值.由此可見,監測規則分為正向監測規則和反向監測規則2種.正向監測規則:假設在k種狀態信號下,用vq表示信號q的取值,則有(θ1∨θ2∨…∨θk)→ψd就變成了正向監測規則.反向監測規則:監測決策表的約簡告訴我們在監測規則獲取中ψd→(θ1∨θ2∨…∨θk)也是成立的,這種規則稱為反向故障監測規則.正向故障監測規則和反向故障監測規則都可以被用作故障監測,這和決策邏輯中的正向和反向推理是相對的.
決策邏輯是在粗糙集知識獲取以后進行具體應用的體現,它是采用知識進行推理,進而得到結論,從而進行結果判斷和控制推理.依據推理方法不同,邏輯推理有下面3種:正向推理、反向推理、混合推理.
正向推理:所謂正向推理,其實是一種用數據驅動的推理方式,依據原本的事實,把它和規則庫中的規則進行比較,如果滿足某種規則,就會執行這條規則的結論;如果出現了新的事實,就會利用一樣的方法對新事實和原來的事實進行推理.為了抑制循環現象的發生,此過程可利用一些控制策略.
反向推理:所謂反向推理,其實是目標驅動的一種推理方法,此過程主要是找到那些證明不需要采用規則的事實.具體方法是:隨機確定一個目標,接著找到和目標結論有關系的規則,然后進行規則的驗證,但是這之前需要看能否滿足有關的規則,如果滿足,則目標就被證明.為了抑制循環現象的發生,此過程可利用一些控制策略.
混合推理:混合推理吸取了正向和反向推理的優點,其實是一種正向和反向推理的循環和混合方法.從而避免了數據的盲目采集.
利用決策規則進行監測的步驟是:
1) 在復雜工業系統運行故障監測決策表時,當樣本x|=(θ1∨θ2∨…∨θk),但x|=~ψd時,即可初步判定系統存在故障.如果對系統運行狀況取值進行各種假設之后還可能導致某些樣本和故障監測規則矛盾的話,就進行步驟2,否則,診斷結果就認為系統有故障發生.
2) 在各故障源pi的故障監測決策表中,當x|=ψd,且x|=~(θ1∨θ2∨…∨θk)時,即可初步判定系統在故障源pi上有故障出現,先對pi的取值進行各種假設之后,若還是不符合工業系統運行狀況的故障監測規則,就直接跳至步驟3進行處理,否則就說明故障源pi為此工業過程的故障點.
3) 在各故障源pi的故障監測決策表中,從其他故障源中找到使ψd∧(~(θ1∨θ2∨…∨θk))成立的信號,同時判斷那些點是否有故障.先對那些點的取值進行各種假設后,若還不符合工業系統運行狀況的故障監測規則,就直接跳至步驟4進行處理,否則就說明這些點為此工業過程的故障點.
4) 在復雜工業系統運行故障監測決策表的故障源信號里找到使(θ1∨θ2∨…∨θk)∧~ψd成立的故障源信號點,同時判定這些點是否有故障.步驟3與步驟4構成了混合推理.
4 故障監測性能分析方法
可以利用故障監測的正確率和誤報率來定量分析故障監測決策規則中各信號源之間影響程度的大小.
設在∑中,信號源pi共有k種狀態,與故障監測決策規則中關于決策j的規則相匹配的對象為Oij,則正確率有如下表達式:
則誤報率為:1-γpi.
需要注意的是,這里的正確率僅表示故障監測時正確分類的一種可能性,是一種對監測效果的估計,并不代表實際工業過程中監測的正確率.監測的誤報率主要是由狀態空間模型的不完備性、不一致性引起的,但若事先對不一致性進行補充就可以將正確率最終提高到1.
5 結語
本文結合工業過程的非線性化特點,把基于概率分布的混合決策表離散化方法及基于分明矩陣和約簡樹的增量式屬性約簡方法應用到工業過程狀態監測中,闡述了工業過程知識獲取、狀態監測和監測性能評價方法.這種監測方法在一定程度上提高了復雜工業過程狀態監測的效率和精度,具有一定的理論價值和實際應用價值.
[1] 馬玉鑫.流程工業過程故障檢測的特征提取方法研究[D].上海:華東理工大學,2014.
[2] 王冬梅,王繼成.基于粗糙集的機車電線路故障診斷方法[J].長春工業大學學報(自然科學版),2008,29(05).
[3] 張德齊.基于粗糙集理論的電機故障診斷方法研究[D].錦州:渤海大學,2015.
[4] 黃景濤.基于粗集和概率分布的混合決策表離散化算法[J].計算機工程與應用,2009,45(07).
[5] 侯 楓.基于分明矩陣和約簡樹的增量式屬性約簡算法[J].計算機工程與應用,2011,46(11).
[責任編輯 梧桐雨]
Fault Monitoring Methods of Industrial Processes Based on Rough Set
LIU Fengnian
(SanmenxiaPolytechnic,Sanmenxia472000,China)
In order to deal with the problem of difficulty to establish model and high rate of false positives about traditional method of failure monitoring, according to the nonlinearity characteristics of the industrial process, a method for industrial process status monitoring was presented in this thesis. With this method, incremental algorithms for attribute reduction based on discernibility matrix and reduction tree and novel algorithm for discretization of mixed decision table based on probability distribution are applied to industrial process condition monitoring. This paper expounds the method of industrial process of knowledge acquisition and condition monitoring and performance evaluation. This kind of monitoring method improved the efficiency and precision of the industrial process condition monitoring, and it has certain value of practical application.
rough set; industrial processes; fault monitoring
2016-11-21
劉豐年(1982- ),男,河南三門峽人,三門峽職業技術學院講師,碩士,主要從事模式識別與智能系統研究。
TP277
A
1671-8127(2017)02-0080-04
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25