太陽能自動跟蹤系統
2017-06-02 23:07:49牛得林康學亮林曉芳
中國新通信 2017年10期
牛得林+康學亮+林曉芳
【摘要】 太陽能自動跟蹤系統是為了提高太陽能發電裝置的發電效率而設計的。本系統主要作用是讓太陽能發電板實時對太陽進行跟蹤,使太陽光實時垂直照射在太陽能發電板,這樣就可以達到提高發電效率的目的。本文主要介紹了太陽能跟蹤系統的硬件設計和總體控制方案。
【關鍵詞】 太陽能 自動跟蹤系統
引言
太陽能作為全世界公認的一種干凈能源,它相對于傳統的化石能源有三大長處:第一:它是目前為止人類可以使用的分布最廣的能源之一。從太陽誕生之時到現在的幾億年中,太陽損耗的能量不到它本身總能量的百分之二。目前太陽正處于壯年期,它所剩下的能量還可供地球消耗幾十億年之久。第二:在地球的每個角落都有太陽能的分布。無論是在炎熱的非洲還是寒冷的極地太陽能都是一種方便獲得便捷能源。特別是在那些不利于架設電網線路的地區,更能突出太陽能發電的重要性。第三:太陽能作為清潔能源,在作為一次能源發電時不會對環境造成污染,大力發展太陽能發電還可減少化石燃料燃燒,對緩解環境污染有積極作用。
一、總體方案
本方案中經過兩個垂直較著在太陽能發電板上的的太陽能主動跟蹤傳感器來檢測照到太陽能發電板上的太陽光。豎直方向的太陽能自動跟蹤傳感器檢測并控制太陽能發電板的水平角度,水平方向的太陽能自動跟蹤傳感器檢測并控制太陽能發電板豎直角度[1]。太陽能自動跟蹤傳感器通過判斷太陽入射光線的照射角度,并通過L298N電機驅動模塊對兩個自鎖減速電機來調控太陽能電池板的角度,這樣就可以實現控制太陽能電池板對太陽方位進行實時追蹤,從而提高對太陽能的利用率。
二、硬件系統方案
2.1 傳感器
本設計中的采用全封閉式太陽能自動跟蹤傳感器作為太陽光線。此傳感器可以防水防雨防雹安全可靠,從而極大避免了傳感器因極端天氣而遭到破壞導致系統不能正常工作的情況,這樣就可以使系統全天候條工作。傳感器靈敏度高無論是中午較強烈的陽光還是早晚較弱的太陽光線都能正確對準光線,并準確判斷方位。
全封閉式太陽能自動跟蹤傳感器為了方便安裝,傳感器上只設計了四根線,他們分別是5V電源線,地線,還有兩根是信號線。全封閉式太陽能自動跟蹤傳感器中使用兩個背對安放的光敏電阻用于檢測光照及光照角度[1]。當傳感器兩側光照不對稱時,傳感器兩根信號線輸出電壓不相等,通過這個電壓差在結合傳感器放置的位置就可以判斷出太陽能電池板此刻的方位,然后通過控制減速電機來調整電池板到最佳方位。
2.2 電機驅動
本方案采用L298N電機驅動模塊作為電機的驅動模塊。
L298N機電驅動模塊具備較高轉矩重量比和較寬的調速規模。相對于電子市場上的其他驅動模塊,L298N電機驅動模塊具有很高的可靠性。因此L298N電機驅動模塊被廣泛的應用在電子設計方面。L298N電機驅動模塊在設計上由邏輯電源和驅動電源兩個電源電路組成,由圖可知6V和12V分別為邏輯電源和驅動電源。J4和J6接口接入的是輯電邏源和驅動電源,進而為電機驅動模塊供電。J1與J2分別為全封閉式太陽能自動跟蹤傳感器控制兩個自鎖減速電機的輸入端,J3與J5分別與兩個自鎖減速電機的正極和負極相連。
因為本計劃利用的自鎖減速電動機是線圈式的電動機,是以從運行狀況驟然轉換到截止狀況時會構成很大的反向電流,在電路中添加穩壓二極管電路就為了在發生反向電流的時可以泄流以保護電路不被損害。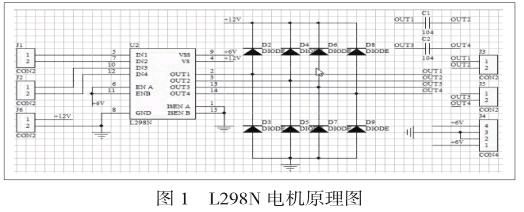
驅動電路的信號輸入接口J1,J2接水平傳感器的兩條信號線來驅動控制太陽能發電板俯仰自由度的電機,J3,J5接豎直傳感器的兩條信號線來驅動控制太陽能發電板水平自由度的電機,J4接電機的電源線,用于給減速電機供電。當照到傳感器的光照不對稱時,傳感器兩根信號線輸出電壓不相等導致電機驅動輸出端的電壓不相等,則作用在減速電機兩端電壓也就不相等這樣就可以驅動電機正傳或反轉。當電機轉到合適角度后,傳感器兩端關照對稱,兩個信號線輸出等伏的電壓,電機停止旋轉。
三、總結
本設計中L298N電機驅動模用于間歇性的跟蹤太陽方向,進而使太陽能電池板一直處于大功率輸出狀態。提高太陽能發電裝置的發電效率,進而使經濟效益最大化。
參 考 文 獻
[ 1]L298N電機驅動板 步進機器人 Arduino 單片機模塊_電機驅動板.
[2]一種基于單片機的電機轉速檢測儀設計.
