基于信號采集的電動4WD汽車滑轉(zhuǎn)率計算的研究*
2017-06-05 14:21:32桂臨秋
桂臨秋 羅 杰 秦 凱
(武漢理工大學(xué)自動化學(xué)院 武漢 430070)
基于信號采集的電動4WD汽車滑轉(zhuǎn)率計算的研究*
桂臨秋 羅 杰 秦 凱
(武漢理工大學(xué)自動化學(xué)院 武漢 430070)
利用GPS/INS組合系統(tǒng)和基于BP神經(jīng)網(wǎng)絡(luò)的車輪狀態(tài)識別與車速估計系統(tǒng)獲取汽車縱向速度.根據(jù)GPS的運行情況,當(dāng)GPS信號在鎖時,利用GPS/INS組合系統(tǒng)獲取汽車縱向速度并訓(xùn)練BP神經(jīng)網(wǎng)絡(luò);當(dāng)GPS信號失鎖時,利用BP神經(jīng)網(wǎng)絡(luò)識別車輪狀態(tài)為打滑狀態(tài)或者滾轉(zhuǎn)狀態(tài),根據(jù)車輪狀態(tài)結(jié)合汽車縱向加速度和車輪線速度計算汽車的縱向速度.通過實際的道路實驗,驗證了整個系統(tǒng)對汽車縱向速度獲取的精確度,證實了該方法的可行性與可靠性.
電動4WD汽車;驅(qū)動防滑;GPS/INS系統(tǒng);BP神經(jīng)網(wǎng)絡(luò)
汽車驅(qū)動防滑系統(tǒng)(acceleration slip regulation,ASR)是防止汽車驅(qū)動輪發(fā)生打滑的一套控制系統(tǒng).當(dāng)車輪轉(zhuǎn)動而車身不動或是汽車的移動速度低于驅(qū)動輪的線速度時,車輪胎面與地面之間就有相對的滑動,這種滑動稱為“滑轉(zhuǎn)”[1].過度滑轉(zhuǎn)會使縱向附著力下降,使驅(qū)動車輪產(chǎn)生的牽引力減小,導(dǎo)致汽車的起步性能、加速性能和在滑溜路面的通過性能下降.
滑轉(zhuǎn)率的獲取是驅(qū)動防滑的重點之一,國內(nèi)外學(xué)者對電動4WD汽車滑轉(zhuǎn)率獲取做出了大量研究,主要是采用車輛動力學(xué)模型和輪胎模型對滑轉(zhuǎn)率進(jìn)行估算[2-4],但不同的車輛參數(shù)和復(fù)雜的模型建立制約了其實際應(yīng)用.隨著微電設(shè)備的發(fā)展,多傳感采集與多信息融合技術(shù)逐漸成熟,利用傳感器對汽車運行參數(shù)進(jìn)行采集從而直接計算滑轉(zhuǎn)率的方法引起了廣泛關(guān)注.特別是現(xiàn)廣泛應(yīng)用于汽車導(dǎo)航的GPS/INS系統(tǒng),其在驅(qū)動防滑上的應(yīng)用具有很好的前景.
1 驅(qū)動防滑分析
車輛在低附路面加速或者在對開路面上行駛的時候,由于驅(qū)動力矩大于車輪來自路面的縱向作用力,輪速會大于車速,驅(qū)動輪會相對地面有向后的滑動,驅(qū)動輪的運動實際情況是一種邊滾邊滑的過程,所以引入車輪滑轉(zhuǎn)率S來定量的描述這一過程.滑轉(zhuǎn)率S越大,滑動成分越多,其定義為車輛的理論速度與實際速度的差與理論速度的比值為[5-6]
(1)
式中:S為滑轉(zhuǎn)率;r為車輪半徑;ω為驅(qū)動輪角速度;v為車輛縱向速度.當(dāng)車輛在良好的附著路面上正常驅(qū)動行駛時,此時車輪滑轉(zhuǎn)率很小,是不會發(fā)生打滑現(xiàn)象,稱車輪處于滾轉(zhuǎn)狀態(tài);當(dāng)車輛由良好的附著路面進(jìn)入低附路面或者驅(qū)動加速時,滑轉(zhuǎn)率會大幅上升,車輪發(fā)生打滑,此時則稱車輪處于打滑狀態(tài).為方便用滑轉(zhuǎn)率來對車輪狀態(tài)進(jìn)行明確的界定,文中假定,當(dāng)滑轉(zhuǎn)率超過10%時,認(rèn)為車輪處于打滑狀態(tài),反之認(rèn)為處于滾轉(zhuǎn)狀態(tài).車輛的滑轉(zhuǎn)率S會影響車輪與地面的縱向附著系數(shù)μx.根據(jù)魔術(shù)公式,它們之間存在關(guān)系見圖1.由圖1可知,縱向附著系數(shù)μx最大值對應(yīng)的滑轉(zhuǎn)率S為此路面下的最優(yōu)滑移率S[7].
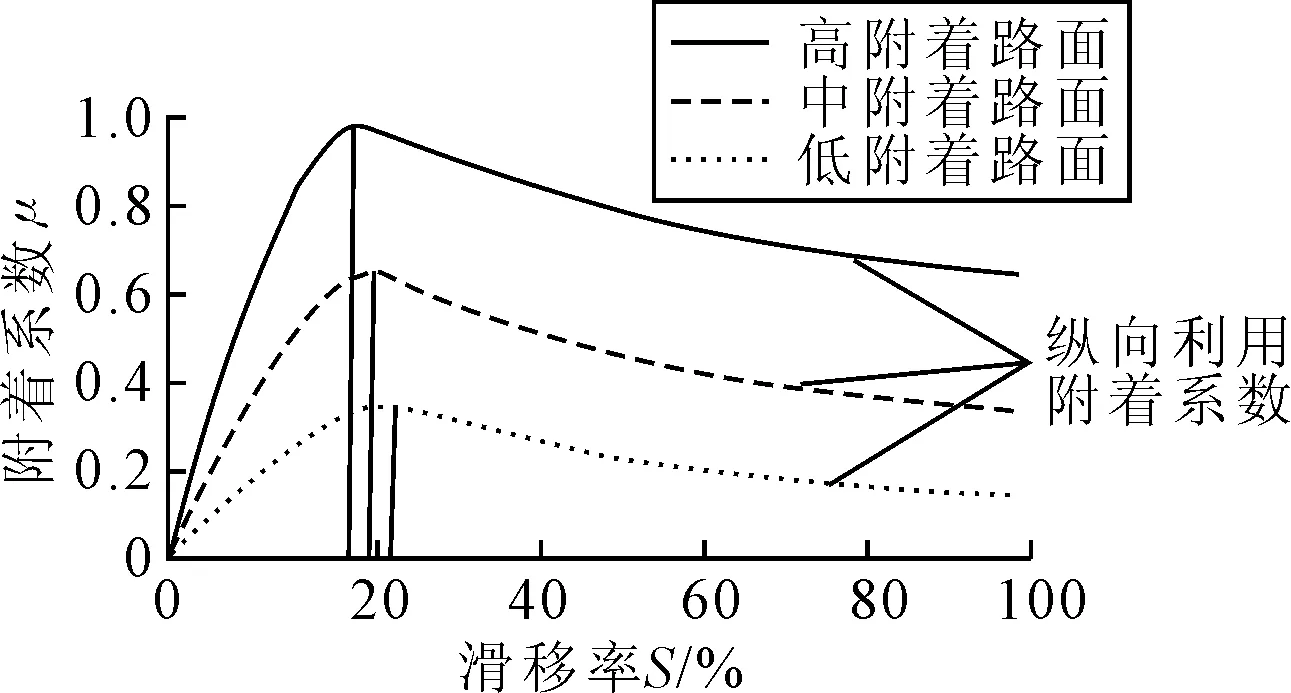
圖1 魔術(shù)公式曲線
對于電動4WD汽車,由于輪轂電機的驅(qū)動力矩可以直接控制,所以一般將滑轉(zhuǎn)率S作為反饋量輸入輪轂電機控制器,當(dāng)車輛打滑時,通過控制輪轂電機的驅(qū)動力矩將滑轉(zhuǎn)率S控制在最優(yōu)滑轉(zhuǎn)率S0附近,所以計算滑轉(zhuǎn)率S是驅(qū)動防滑實現(xiàn)的關(guān)鍵.
為計算滑轉(zhuǎn)率,車輪滾動半徑可由測量得出,驅(qū)動輪角速度可以由輪轂電機直接輸出,然而對于縱向車速信號,一般兩輪驅(qū)動汽車可通過非驅(qū)動輪輪速的平均值估算得出[8],然而4WD汽車沒有非驅(qū)動輪,各輪均有可能打滑,不能用于估算車速,因此利用GPS/INS組合系統(tǒng)對汽車的縱向速度進(jìn)行采集,然后直接計算滑轉(zhuǎn)率.
GPS/INS組合系統(tǒng)中GPS模塊在運行的過程中容易出現(xiàn)失鎖,造成組合系統(tǒng)失效.對此,Atia等[9]提出了一種利用快速正交搜索算法的信息融合方法,但該方法算法復(fù)雜不易實現(xiàn)且額外增加了硬件成本.陳鑫鑫等[10]提出了一種結(jié)合BP神經(jīng)網(wǎng)絡(luò)算法的GPS/INS組合方法,在GPS信號丟失的情況下利用訓(xùn)練后的BP網(wǎng)絡(luò)直接輸出速度的預(yù)測值,然而由BP網(wǎng)絡(luò)直接輸出速度值,其偏差較大,實際效果并不理想.
鑒于此,針對汽車驅(qū)動輪運行狀態(tài)的特點,文中利用GPS/INS組合系統(tǒng)和基于BP神經(jīng)網(wǎng)絡(luò)的車輪狀態(tài)識別與車速估計系統(tǒng)來獲取車輛縱向速度并直接計算滑轉(zhuǎn)率.
2 系統(tǒng)結(jié)構(gòu)
利用單個加速度計模塊可以提供很好的短期精確度的縱向速度,然而從長期來看會產(chǎn)生累積誤差.裝載在汽車上的GPS/INS系統(tǒng),一般在汽車不發(fā)生大的轉(zhuǎn)彎的情況下,此時認(rèn)為GPS的輸出為比較精確的汽車縱向車速,然而GPS的信號更新周期一般為1 s左右,因為周期過長不能直接用于控制功能,并且GPS信號在工作中容易出現(xiàn)失鎖,影響滑轉(zhuǎn)率計算.針對其特點,建立了基于卡爾曼濾波的GPS/INS組合系統(tǒng)用于GPS在鎖時的縱向車速計算,建立了基于BP神經(jīng)網(wǎng)絡(luò)的車輪狀態(tài)識別與車速估計系統(tǒng)來解決GPS失鎖的問題.其系統(tǒng)結(jié)構(gòu)圖見圖2.
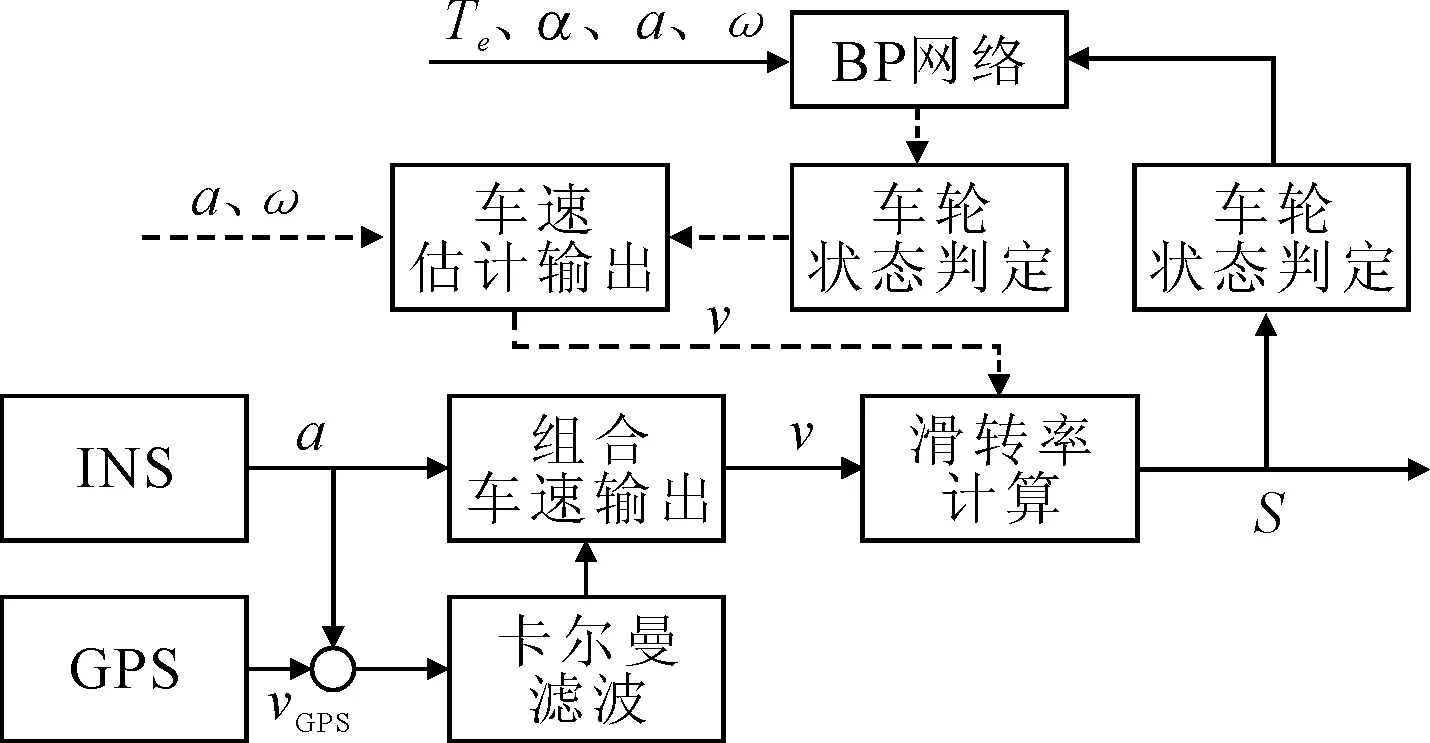
圖2 系統(tǒng)流程圖
根據(jù)GPS的信號狀態(tài)分為兩種工作模式:①運行于GPS信號在鎖,運用基于卡爾曼濾波的GPS/INS組合系統(tǒng)求得縱向車速,計算滑轉(zhuǎn)率并通過分析滑轉(zhuǎn)率對車輪狀態(tài)進(jìn)行判定,其判定閥值通過經(jīng)驗與實際實驗情況進(jìn)行標(biāo)定,以車輪狀態(tài)為反饋對BP神經(jīng)網(wǎng)絡(luò)進(jìn)行在線訓(xùn)練,流程見圖2中實線部分;②運行于GPS信號失鎖,當(dāng)GPS信號失鎖時,首先用訓(xùn)練好的BP神經(jīng)網(wǎng)絡(luò)來識別車輪狀態(tài),如果車輪處于滾轉(zhuǎn)狀態(tài)則用車輪線速度估算汽車縱向速度,如處于打滑狀態(tài)則用前次有效車速結(jié)合加速度計信號計算出車速,并計算滑轉(zhuǎn)率,流程見圖2中虛線部分.這樣可以在GPS信號失鎖并且車輪打滑的情況下計算出較為精準(zhǔn)的滑轉(zhuǎn)率S.
3 基于卡爾曼濾波的GPS/INS組合系統(tǒng)設(shè)計
根據(jù)不同的應(yīng)用層次GPS/INS的組合有不同的方法,按照組合深度分為松散組合方案與緊密組合方案,因為緊密組合算法困難、計算量大在實際運用中不易現(xiàn)實并且松散組合可以滿足滑轉(zhuǎn)率計算對速度精度的要求,所以文中應(yīng)用松散組合方案[11].
以加速度計采樣得到的速度離散模型為
(2)
式中:v(n),v(n-1)為加速計兩次采樣點前后的縱向速度;Ta為加速度計的采樣周期;a(n)為加速度計的采樣值;q為系統(tǒng)噪聲并且q~N(0,Q).
式中:r為檢測噪聲,r~N(0,R);mn·q~N(0,m2nQ).
以式(3)為中的數(shù)學(xué)模型為基礎(chǔ),構(gòu)建得到卡爾曼濾波方程.在k-1時刻速度最優(yōu)估計值為v(k-1)其最優(yōu)估計值方差為P(k-1).
在k時刻其預(yù)測過程方程為
預(yù)測值:
(4)
最小均方誤差矩陣:
(5)
在k時刻其修正過程方程為
誤差增益:
(6)
修正值:
(7)
最小均方誤差矩陣:

(8)
通過在預(yù)測過程與修正過程之間不停的迭代,可以完成卡爾曼濾波過程,并輸出GPS采樣點時刻的縱向車速,再結(jié)合加速度計的單傳感輸出,得到的縱向車速為
(9)
式中:v(k-1)m為GSP第k-1采樣后加速度計第m次采樣時刻的速度值,是組合系統(tǒng)的最終輸出.
4 基于BP神經(jīng)網(wǎng)絡(luò)的車輪狀態(tài)識別與車速估計
4.1 BP神經(jīng)網(wǎng)絡(luò)的建立

BP神經(jīng)網(wǎng)絡(luò)的前向計算公式為
(10)
式中:H為隱含層節(jié)點數(shù);N為輸入層節(jié)點數(shù);φ為層間傳遞函數(shù);w為神經(jīng)元音的權(quán)值;b為神經(jīng)元內(nèi)的閾值.
4.2 車輪狀態(tài)識別與車速估計
BP網(wǎng)絡(luò)主要工作在兩種模式:①在線訓(xùn)練模式,當(dāng)GPS信號鎖定時,利用GPS/INS組合系統(tǒng)輸出的縱向車速計算滑轉(zhuǎn)率,判定出的車輪狀態(tài),對神經(jīng)網(wǎng)絡(luò)進(jìn)行在線實時訓(xùn)練.②車輪狀態(tài)識別模式,當(dāng)GPS信號失鎖時,利用訓(xùn)練后的神經(jīng)網(wǎng)絡(luò)系統(tǒng)對車輪狀態(tài)進(jìn)行識別.當(dāng)神經(jīng)網(wǎng)絡(luò)系統(tǒng)識別的車輪狀態(tài)為滾轉(zhuǎn)時,則利用車輪的線速度對此時的車速進(jìn)行估計,處于滾轉(zhuǎn)狀態(tài)穩(wěn)定運行的車輪線速度基本可以反映車速,當(dāng)識別的車輪狀態(tài)變化為打滑時,則利用狀態(tài)變化時刻的車速估計值v0結(jié)合加速度計進(jìn)行車速估計,其公式為
(11)
運用車速估計值計算出滑轉(zhuǎn)率,因為此過程中加速度的積分時間較短,其誤差積分不大,其精度可以滿足驅(qū)動防滑控制要求.
5 實驗分析
為驗證上述方法的可行性,借助東風(fēng)某款基于輪轂電機的四輪驅(qū)動新能源汽車與GPS/INS系統(tǒng)作為實驗平臺.GPS模塊采用VK18U7,加速度計模塊采用LIS3DH,實驗中設(shè)定GPS信號更新周期為1s,加速度計采樣周期為50ms.輪轂電機通過車載CAN網(wǎng)絡(luò)輸出車輪角速度,汽車真實車速通過五輪儀采集作為參考信號.設(shè)計了如下兩個實驗.
5.1 驗證GPS/INS組合系統(tǒng)在GPS信號在鎖的情況下的工作情況
設(shè)計東風(fēng)某款新能源汽車在玄武巖瓦路面上進(jìn)行起步實驗,通過噴水,在濕狀態(tài)下路面的附著系數(shù)為0.24.首先打開采集平臺并調(diào)節(jié)加速度計與GPS的位置使得其Y軸與汽車的前進(jìn)方向平行.起步時為使得車輪打滑,直接將油門踏板開度到最大,此時汽車速度低,路面附著系數(shù)低,容易出現(xiàn)打滑的現(xiàn)象.汽車行駛過程中,調(diào)節(jié)方向盤使得車輛行駛方向盡量不變.此實驗在寬闊的地方進(jìn)行,便于GPS信號的接收.
圖3為GPS信號在鎖的情況下GPS/INS組合系統(tǒng)的輸出車速、GPS采集車速與加速度計直接積分后的車速.圖4為組合系統(tǒng)輸出車速、由五輪議采集的真實車速與左前輪線速度的對比,由圖3~4可知,組合系統(tǒng)輸出車速可以很好的反映出真實車速的情況,其誤差非常小.當(dāng)車輛剛起步時由于油門踏板開度最大其驅(qū)動力遠(yuǎn)大于路面摩擦力輪線速度大幅度上升至70km/h,后由于輪轂電機本身的限制其轉(zhuǎn)速基本平穩(wěn),此時車輪處于打滑狀態(tài),車身速度由于牽引力不受控制只受路面利用附著系數(shù)影響所以基本處于均加速的狀態(tài),在第9s之后由于油門踏板開度減小驅(qū)動力下降同時滑轉(zhuǎn)率減小路面利用附著系數(shù)增大造成輪速降低至車身速度,此時車輪處于滾轉(zhuǎn)狀態(tài),其車輪線速度與車速之間的誤差很小,可見用滾轉(zhuǎn)狀態(tài)下的車輪線速度可以很好的估算出車速.
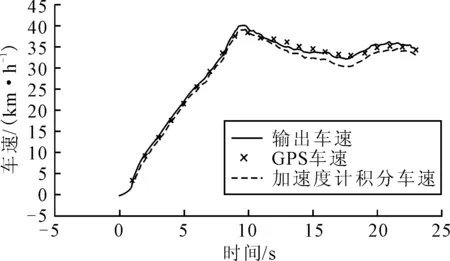
圖3 GPS/INS組合系統(tǒng)輸出
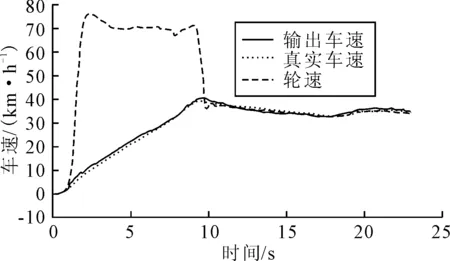
圖4 車速輸出比較
圖5為滑轉(zhuǎn)率的計算值,由圖5可知,車輛剛起步時,由于車速過低,誤差影響作用過大,出現(xiàn)了很大的雜波,當(dāng)車速上升后滑轉(zhuǎn)率波形平穩(wěn),利用GPS/INS組合系統(tǒng)得到的汽車滑轉(zhuǎn)率無論在精度或者周期上均滿足驅(qū)動防滑的控制策略.
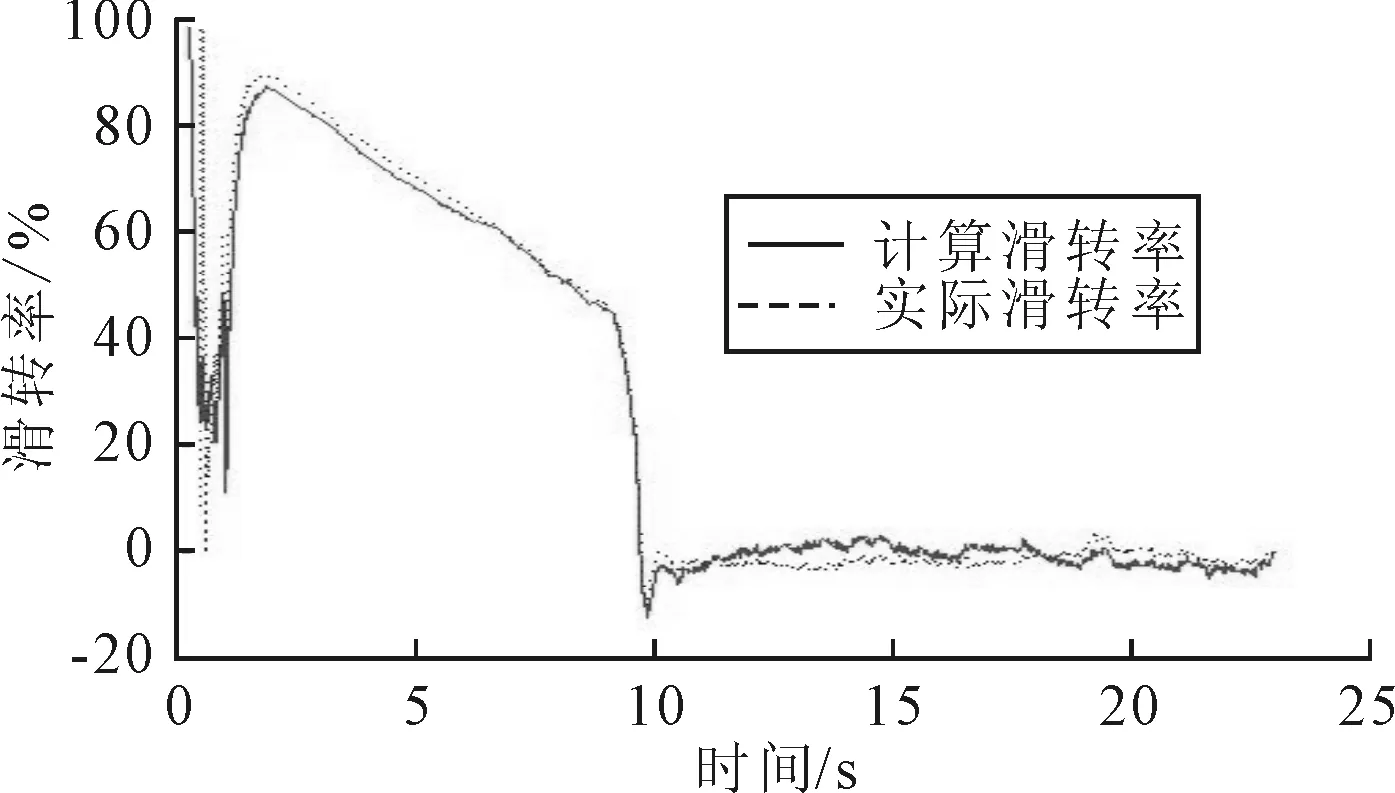
圖5 系統(tǒng)輸出滑轉(zhuǎn)率比較
5.2 驗證基于BP神經(jīng)網(wǎng)絡(luò)的車輪狀態(tài)識別與車速估計系統(tǒng)
設(shè)計東風(fēng)某款新能源汽車在對開路面上進(jìn)行起步實驗,左側(cè)輪處于鋪裝路面,為水泥混凝土路面其附著系數(shù)為0.8,右側(cè)輪處于低附路面,為濕狀態(tài)的玄武巖瓦路面其附著系數(shù)為0.24,打開車身信號采集系統(tǒng)由車載CAN網(wǎng)絡(luò)獲取車輪驅(qū)動力矩Te、車輪角速度ω、車輪角加速度α,由加速度計采集汽車縱向加速度a作為訓(xùn)練后的BP神經(jīng)網(wǎng)絡(luò)的輸入,識別各輪狀態(tài),結(jié)合各車輪輪速和加速計信號分別對車速進(jìn)行估計.
圖6中為四個輪子的線速度和BP神經(jīng)網(wǎng)絡(luò)對車輪狀態(tài)的識別,圖7中為各輪線速度與車速的比較,由圖6~7可知,在對開路面中右前輪、右后輪均發(fā)生了打滑,左前輪因為車輛在實驗時車姿不穩(wěn)進(jìn)入低附路面所以也存在打滑,并且訓(xùn)練后的BP神經(jīng)網(wǎng)絡(luò)系統(tǒng)可以很好的識別出車輪狀態(tài).圖8中為基于BP神經(jīng)網(wǎng)絡(luò)的車速估計系統(tǒng)輸出,從圖8可知,各輪的估計輸出值與真實車速之間的誤差很小,可以用于估計車速的實際值.

圖6 基于BP神經(jīng)網(wǎng)絡(luò)的車輪狀態(tài)識別輸出
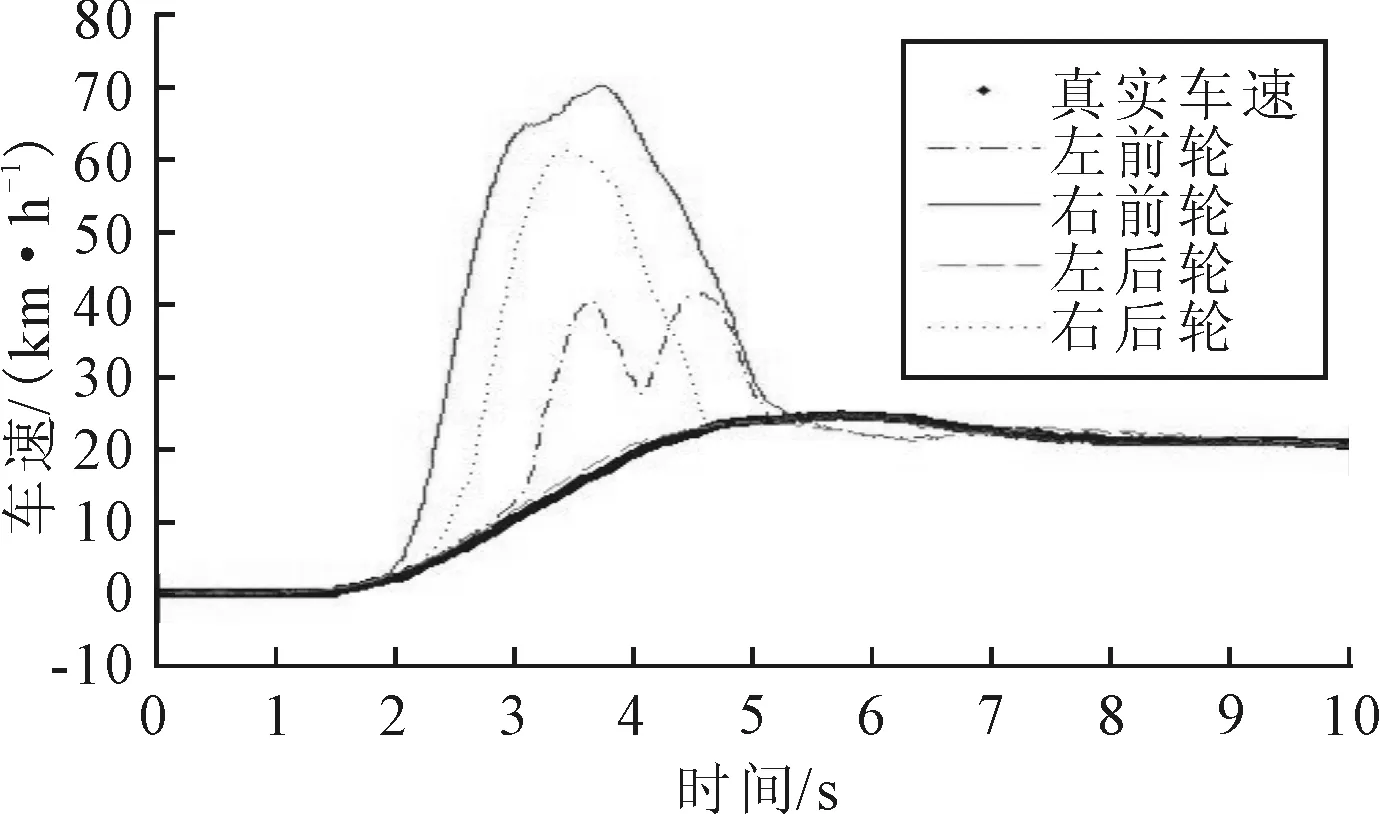
圖7 各輪線速度與真實車速比較
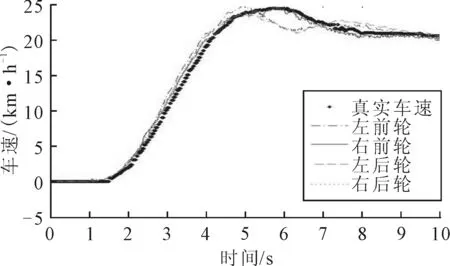
圖8 基于BP神經(jīng)網(wǎng)絡(luò)的車速估計系統(tǒng)輸出
6 結(jié) 束 語
利用GPS/INS組合系統(tǒng)結(jié)合卡爾曼濾波來計算汽車縱向速度從而計算滑轉(zhuǎn)率,建立了基于BP神經(jīng)網(wǎng)絡(luò)的車輪狀態(tài)識別與車速估計系統(tǒng)來解決在一些復(fù)雜路況下的GPS失鎖的問題.通過實驗驗證,證實了其可行性與可靠性,通過與真實的滑轉(zhuǎn)率進(jìn)行對比,證實了系統(tǒng)的輸出精度與采樣頻率均適用于驅(qū)動防滑策略的實現(xiàn),并且能夠在GPS信號長期失鎖的情況下,極大程度的得到精確的滑轉(zhuǎn)率的值.由于較精準(zhǔn)的GPS/INS組合系統(tǒng)的硬件成本很高并且BP神經(jīng)網(wǎng)絡(luò)算法復(fù)雜,所以今后的關(guān)注方向為運用單傳感器結(jié)合車輛與車輪的數(shù)學(xué)模型進(jìn)行滑轉(zhuǎn)率的估算.
[1]李剛,宗長富,張強,等.基于模糊路面識別的4WID電動車驅(qū)動防滑控制[J].華南理工大學(xué)學(xué)報(自然科學(xué)版),2012(12):99-104.
[2]張振良,趙亞超,黃妙華,等.電動輪車驅(qū)動防滑控制策略的研究[J].武漢理工大學(xué)學(xué)報(信息與管理工程版),2014,36(6):794-797.
[3]宗新怡,李剛,鄧偉文.四輪獨立驅(qū)動電動汽車車速估計研究[J].機械設(shè)計與制造,2013(9):83-85.
[4]冷亞南.四輪獨立驅(qū)動電動車車速估計及滑移率控制方法研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2015.
[5]潘旭峰.現(xiàn)代汽車電子技術(shù)[M].北京:北京理工大學(xué)出版社,1998.
[6]余志生.汽車?yán)碚揫M].北京:機械工業(yè)出版社,2000.
[7]袁景明,何正義,歐陽,等.輪轂電機電動汽車縱向車速估計方法研究[J].汽車工程學(xué)報,2013,3(4):287-294.
[8]葉陽,劉昭度,裴曉飛,等.基于聯(lián)合控制的汽車驅(qū)動防滑系統(tǒng)[J].沈陽工業(yè)大學(xué)學(xué)報,2011,33(6):672-677.
[9]ATIA M, DONNELLY C, NOURELDIN A, et al. A novel systems integration approach for multi-sensor integrated navigation systems[C]. Systems Conference (SysCon), 2014 8th Annual IEEE,2014.
[10]陳鑫鑫,張復(fù)春,郝雁中.神經(jīng)網(wǎng)絡(luò)輔助的GPS/INS組合導(dǎo)航濾波算法研究[J].電子技術(shù)應(yīng)用,2015,41(5):84-87.
[11]陳燃.基于BP神經(jīng)網(wǎng)絡(luò)對INS/GPS組合導(dǎo)航數(shù)據(jù)融合技術(shù)的研究[D].哈爾濱:哈爾濱工程大學(xué),2009.
Study on Calculation of 4WD Electric Vehicle Slip Ratio Based on Signal Acquisition
GUI Linqiu LUO Jie QIN Kai
(CollegeofAutomation,WuhanUniversityofTechnology,Wuhan430070,China)
GPS/INS integrated system and BP neural network system are proposed to acquire the longitudinal velocity of vehicle. According to the status of GPS, the GPS/INS system is used to acquire the longitudinal velocity while GPS signals are available. During GPS outrage, BP recognizes the wheel status as slipping or rolling and then estimates the longitudinal velocity based on the longitudinal acceleration and wheel linear velocity. By conducting actual experiment, the results indicate that the proposed methods can acquire accurate longitudinal velocity and show the effectiveness and reliability.
four-wheels-drive electric vehicle; acceleration slip control; GPS/INS integrated system; BP neural network
2016-12-17
*湖北省自然科學(xué)基金面上項目資助(2014CFB485)
U469.72
10.3963/j.issn.2095-3844.2017.02.033
桂臨秋(1992—):男,碩士生,主要研究領(lǐng)域為汽車驅(qū)動防滑
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
汽車與安全(2019年9期)2019-11-22 09:48:03
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50