面向無人駕駛的車道級道路電子地圖制作流程探討
2017-06-09 10:30:47王靜
科技資訊 2017年12期
王靜

摘 要:高精度車道級道路電子地圖是實現車道級導航與監控的基礎地理信息數據和必要條件,未來在無人駕駛汽車方面具有廣闊的應用空間。該文旨在研究車道級道路電子地圖的制作,實現路徑為通過高精度、高分辨率的道路航空影像,結合具有三維激光掃描和全景數據采集功能的移動測量車采集的相關道路數據,從這些數據中提取滿足亞米級導航與監控要求的道路路網數據,包括車道數、車道寬等屬性數據,按照導航電子地圖的要求制作高精度的道路電子地圖。
關鍵詞:移動測量 激光 車道 亞米級 電子地圖
中圖分類號:U46 文獻標識碼:A 文章編號:1672-3791(2017)04(c)-0001-03
隨著交通網絡的高速發展,人類對機動車輛的依賴性與日俱增,傳統的車輛導航與監控精度和手段已經很難滿足社會信息發展的需求,高精度車輛導航監控日益成為社會關注度熱點問題。高精度車道級道路電子地圖是實現車道級導航與監控的基礎地理信息數據和必要條件,未來在無人駕駛汽車方面具有廣闊的應用空間。
車載移動測量系統作為一種先進的測量手段,不僅具有快速、不與測量物接觸、實時、動態、主動、高密度及高精度等特點,而且能采集大面積的三維空間數據和獲取建筑物、道路、植被等城市地物的表面信息。作為在道路上行駛的移動車載測量系統成為各行各業關注的對象,以汽車作為遙感平臺,安裝了高精度GNSS和高動態載體測姿IMU傳感器,基于GNSS/IMU的組合定位定姿使車載系統具有直接地理定位(Direct Georeferencing,DG)的能力,實現了在測量區域內無需地面控制點就可以成圖或掃描數據。
該項目充分利用現有的CORS(Continuous Operational Reference System)平臺資源,結合高效的車載移動測量系統(Vehicle Borne Mobile Mapping Systems),開展亞米級導航與監控要求的道路路網數據采集、處理和電子地圖的制作。
1 工作流程
車道級道路電子地圖制作流程主要包括三部分:移動測量數據采集和處理、車道數據及屬性信息提取和車道電子地圖制作。
1.1 移動測量數據采集和處理
(1)移動測量車作業流程。
①前期準備,如需求分析和路線規劃等。
②外業采集,根據規劃進行外業數據采集。
③內業處理,主要指點云數據的生產。
④應用處理,在點云數據基礎上進行后期應用。
(2)試驗區選取。
該次車道數據采集試驗區選取長沙某高速公路隧道段,全長16.2 km。該路段為雙向6車道,途經2個服務區、3個立交、1個收費站和3.6 km長的隧道。
(3)數據采集。
該次數據采集采用了四維遠見公司研發的SSW車載激光移動測量系統,該系統集成了多個傳感器,包括激光掃描儀、GPS、慣導IMU、控制系統PC104、里程計(DMI)、相機等,見圖1。從車載激光移動測量系統獲取的高密度真彩色三維激光點云數據中可分辨車道分道線、停止線、人行橫道線等細節信息,為提取道路路面詳細信息提供了充足的源數據。
該次作業時間為2014年4月14日上午,道路往返測量,全程作業時間約60 min,路線長度33.1 km。在作業之前,向湖南CORS中心申請了測區附近的3個CORS基站,分別是NJGT、NJJN、NJPK用于后期GPS/IMU數據解算。另外,根據作業當時的天氣條件,調整相機的參數,確保照片數據亮度和色彩能與激光點云匹配。
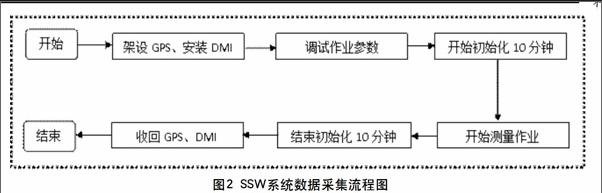
參數設置完成后,啟動流動站GPS、PC104、IMU,開始靜態初始化工作,保持車輛10 min以上靜止不動,之后再進行測量作業。作業過程中移動測量車行駛車速以所在車道允許的最低行駛速度為準,該次車速為60 km/h,并且避免以超車為目的的變道、提速。作業結束后,先結束激光掃描儀,再結束相機曝光,保持車身靜止10 min,做結束初始化,之后依次關閉IMU、流動站GPS、基站GPS,結束工作,見圖2。
(4)內業數據處理。
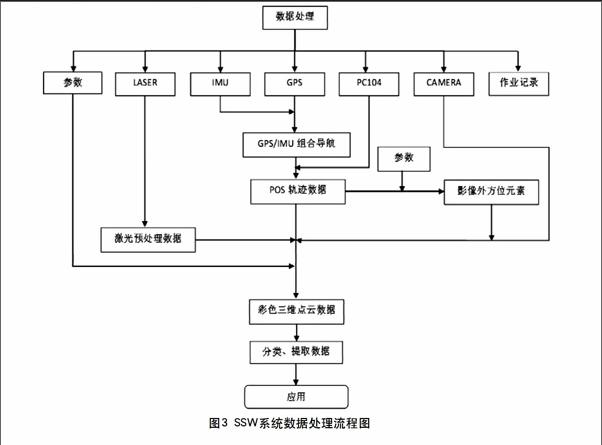
數據采集結束后,需要及時整理和處理數據,以確定數據的有效性。SSW移動測量車一次作業獲取的數據主要包括:激光點云、GPS/IMU數據、數碼影像數據等。數據處理的流程見圖3。
①POS軌跡解算。
利用車載GPS/IMU聯合預約的3個湖南CORS基站差分解算測量車實時位置,坐標采用國家CGCS2000坐標系。由于該次行車路段有較長的隧道,隧道內無法獲取有效GPS信號,加入DMI數據參與組合導航數據解算。解算結果疊加已有的DOM影像數據進行了檢查,吻合度較好。
②影像外方位計算。
利用POS文件與相機的標定參數解算出車載6個相機的影像外方位EO文件,包含每一張影像數據的坐標、三個姿態角等信息。
③彩色點云解算。
利用POS文件解算出激光點云數據的三維坐標,匹配影像數據輸出RGB彩色點云。彩色點云數據格式為*.bxyz,除了三維點云,還包含坐標信息、顏色信息、強度信息、回波信息、掃描線信息等其他相關信息。該次獲取的點云平均點間距小于10 cm,坐標系使用高斯克呂格3°帶投影,中央經線選擇118.5°,高程使用大地高。
④點云精度檢測。
解算出的車道彩色點云數據中包含了極為豐富的地理空間信息,如標牌、路燈、車道線、路邊線等。在高密度的彩色三維點云數據上采集車道分道線、人行橫道線、交叉路口停止線、交通信息燈等信息,既方便又能達到較高的空間幾何精度。為了驗證車載激光三維點云數據的精度能否滿足車道導航數據的精度要求,項目組使用CORS-RTK設備在道路路面選取了較為明顯、易于分辨的地物作為精度檢測點,主要選擇車道標示線及少量路燈。將實測的RTK控制點與三維點云數據相疊加,并選取與控制點對應的同名點云,得到一組平面坐標數據,通過對該組數據進行差值比較和統計,得出車載激光三維點云數據絕對測量精度。
該次RTK檢測點一共有124個,主要檢測XY平面誤差。檢測中誤差0.06 m,95%的點都在0.1 m以內,點云數據的幾何精度非常高,為后期基于點云的車道級道路電子地圖的制作提供了精度保證。
1.2 車道數據及信息提取
車道數據提取是從彩色點云中采集和提取制作地圖所需的車道線、安全島、綠化帶、里程樁、桿狀物(路燈、攝像頭、交通燈和指示牌等)、交通護欄等特征點線,以及相關屬性信息(等級、材質、類型、寬度等)。車道數據提取使用與SSW系統配套的SWDY數據處理軟件先自動提取特征點,然后再人工根據彩色點云檢查修正,最后根據同步相機獲取的高清影像提取相關屬性信息,例如,車道名稱、等級、類型、材質、寬度等。該文重點針對路面,開展了車道線和桿狀物的點云分類提取。
利用SWDY軟件,采用梯度濾波與鄰域取低點處理的提取方法,首先進行道路邊線粗提取,道路邊線點基本被保留下來;再用管道濾波的方法對該結果進行聚類分析,剔除離散點。
桿狀物點云提取,結合了SSW系統各個傳感器之間的特殊屬性,綜合考慮數據特征、物體的物理發生以及其與測量車測量時的相對位置關系進行分類提取。提取時,將測量車行車軌跡與要提取的目標物之間的距離、高差、其自身形態分布特征,甚至顏色信息結合起來,各個參數可以可視化的進行調整,調整后即可看到該組參數的提取效果。通過這種可視化的方式調整提取參數,直到效果滿意為止。
1.3 車道電子地圖制作
車道電子地圖是根據采集的特征點線,以及相應的屬性信息,在ArcGIS軟件中,經過符號化處理、圖面整飾、暈渲后可形成色彩協調、圖面美觀的顯示地圖。為了使電子地圖的色彩協調、符號形象、圖面美觀,設定了要素顯示符號的配圖要求(包括要素及注記的樣式、規格、顏色等),詳見表1。
通過ArcGIS地圖配置,完成了該項目的車道電子地圖的制作,局部示意圖見圖4。
2 結語
車載移動測量系統精度高、速度快、數據豐富,完全能夠滿足道路各項基礎地理信息數據獲取的要求,制作高精度的道路電子地圖,甚至三維電子地圖。隨著我國北斗導航系統的發展,任意時刻都可觀測到超過15顆GNSS衛星,彌補了GPS在亞洲區分布不良的缺點,實現了利用GNSS進行實時精密車輛定位。高精度的車道級電子地圖與車輛實時定位技術的結合,在未來可以預見將助力推進智能無人駕駛汽車的發展,在智能交通管理、高級駕駛輔助系統(ADAS)等領域有著廣闊的應用前景。
參考文獻
[1] 王果,崔希民,袁德寶.車載激光點云領域比較的道路邊線提取方法[J].測繪通報,2012(9):55-57.
[2] 譚賁,鐘若飛,李芹.一種車載激光掃描數據的地物分類方法[J].遙感學報,2012,16(1):50-66.
[3] 馬浩,王留召.基于車載激光點云的道路邊線自動分類與提取[J].測繪科學,2014(6):126-132.
[4] 吳賓,余柏蒗,岳文輝,等.一種基于車載激光掃描點云數據的單株行道樹信息提取方法[J].華東師范大學學報:自然科學版,2013(2):38-49.
[5] 高自強,王忠仁.3維激光掃描樹干提取與建模研究[J].測繪與空間地理信息,2012:35(7):79-81,85.