塔機防碰撞控制算法研究
2017-06-09 23:53:55李達黃威
科學家 2017年5期
李達+黃威
摘 要 由于施工現場通常會設置多臺塔機同時工作,因此塔機之間可能就會發生碰撞,本文針對塔機防碰撞這個問題,首先對塔機碰撞情況進行分析,然后建立塔機模型,對塔機智能避讓算法與控制進行研究,給出了算法的選擇,提出塔機群的等待時間最短算法以及如何實現等待總時間最短算法。
關鍵詞 塔機;防碰撞;智能避讓
中圖分類號 TN21 文獻標識碼 A 文章編號 2095-6363(2017)05-0025-01
隨著我國經濟的飛速發展,建筑行業也進入繁榮發展的時代,由于塔機具有操作容易、節省人力、提高施工效率等特點,塔機在建筑的施工中扮演的角色越來越重要,是現代建筑施工必備的設備,并且隨著科技的發展,塔機也向著大型化、系統化、智能化發展。在現代的建筑施工中,為了提高施工的效率,往往需要多臺塔機配合施工,組成塔機群,因此在施工過程中難免發生碰撞,一旦出現碰撞事故,輕則造成機械的損壞,重則影響工程進度甚至造成人員的傷亡。在這種背景下,對塔機群的防碰撞的研究就顯得十分重要,本文從塔機防碰撞控制算法入手,對塔機防碰撞進行了深入的研究。
1 塔機碰撞情況分析
塔機在工作中會發生碰撞:高塔機在上下調運貨物時與低塔機碰撞,造成塔機損壞與貨物脫落;塔機在旋轉點運貨物時與周圍塔機或者建筑物發生碰撞;低塔機在旋轉調運貨物時與高塔機碰撞;塔機吊勾吊的貨物在下降時與道路上行駛的車輛發生碰撞;塔機在調運貨物時,觸碰周圍的電線;塔機在運輸貨物時,由于操作不當導致貨物掉落,砸上地面上的工作人員。塔機碰撞事故示意圖如圖1所示。
2 建模分析
對于只有單臺塔機工作的施工區域,塔機只考慮與周圍環境的建筑物以及其他東西的碰撞,故采用限位器就可以基本解決,但是大多數施工工地采用的都是塔機群聯合作業,這些塔機之間有交叉作業的區域。我們可以對4臺塔機聯合作業進行建模,如圖2所示,其中方點和圓點分別代表塔機的塔身中心和變幅小車,指針和圓圈分別代表塔機吊臂和吊臂旋轉圓周。可以看出這幾臺塔機之間存在很多交叉區域,這些區域都是塔機之間可能發生碰撞的區域。
要避免塔機之間的互相碰撞,就必須要對各個塔機的吊臂、小車、吊鉤的運動狀態做合理的設置,塔機之間的通信也要時時進行,地面對塔機群的監測系統和塔機之間的智能防撞系統也要科學配置。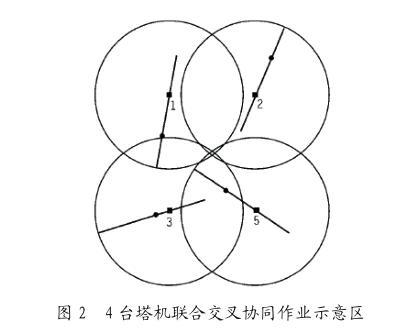
3 智能避讓算法與控制
3.1 算法的選擇
本文以兩臺聯合交叉協同作業的塔機為例,兩臺塔機交叉作業的塔機如圖3所示,其中指針代表塔機吊臂的位置以當前塔機1和塔機2的運行速度計算,塔機1進入干涉區的時刻為T1in,退出干涉區的時刻為T1out,塔機2進入干涉區的時刻為T2in,退出干涉區的時刻為 T2out。當T1out 為了防止2臺塔機碰撞,那么就要保證在同一時間只能有1臺塔機的吊臂出現在交叉區域中,因此,可以選擇當塔機1在交叉區域是塔機2停止等待,或者相反。這種情況下,以“先進入交叉區的塔機不避讓”的原則,假設先進入交叉區域的是塔機1,它可以不受影響進行工作,而塔機2則需要等待一段時間,其工作效率必將受到影響,塔機2受影響等待的時間為Tx=T1out-T2in。若以“等待交叉去總時間最短”的原則,那么還要計算塔機1等待塔機2通過交叉區的等待時間Ty=T2outT1in,在對Tx和Ty進行比較,選擇等待時間短的塔機避讓。綜合考慮各種因素,選擇施工效率高的等待總時間最短法作為本文研究的防碰撞控制算法的核心。 3.2 塔機群的等待總時間最短算法 存在2臺塔機以上的塔機群中,最短等待時間要綜合考慮各個塔機的運轉情況,計算各種情況下的塔機等待時間,然后比較選擇出最短等待時間的避讓方法。例如3臺塔機組成的塔機群可以將各種避讓方式一一列舉,分別計算出各種避讓方式下系統等待的總時間大小,從中選出等待時間最短的方式,此時工作效率最高。對于3臺以上塔機系統,用同樣的方法也能找出最佳的避讓方式。 3.3 等待總時間最短算法的實現 針對這種算法,利用計算機編程以使計算機能計算各種避讓情況下,塔機等待的總時間,從中選擇出等待時間最短的方案,這種方法由于對所有情況進行了計算,因此,這種方法得到的方案是最佳的方案。 4 結論 本文在保證塔機群工作效率的前提下,對塔機防碰撞控制算法進行了最優的選擇,做到了塔機的智能避讓,通過對塔機在交叉工作區的總等待時間的比較,選擇出等待時間最短的避讓方案,既保障了塔機之間不發生碰撞,而且將塔機工作效率提到最高,同時給出了如何利用計算機編程來實現這種算法,這是很有實際意義的,并且這種算法對于塔機防碰撞也是非常有意義的,它將給塔機施工帶來更好的安全保障。 參考文獻 [1]周文海.基于ZigBee技術的塔機群防碰撞系統設計[D].南昌:華東交通大學,2013. [2]陳幫,張洪濤.基于嵌入式Linux的塔機群防碰撞控制系統[J].機電工程,2011(3):346-349. 
