具有直流勵磁的開關磁阻電機矢量控制系統(tǒng)
2017-06-13 09:02:24王思浩孫建忠
微特電機 2017年6期
王思浩,孫建忠
(大連理工大學,大連116024)
0 引 言
具有直流勵磁的開關磁阻(以下簡稱SRDC)電機是在繼開關磁阻電機之后,又一個新的研究方向。20世紀90年代,T.A.Lipo等人提出一種新型電機,即在開關磁阻電機定子上增加一套永磁體來作為簡單的勵磁裝置[1]。這種電機仍然具備SRM的優(yōu)點,稱為永磁雙凸極電機。但由于永磁體的存在,削弱了開關磁阻電機在高溫環(huán)境下運行的能力。Y.Li等提出了一種SRDC電機,將勵磁改為電勵磁[2]。Z.Q.Zhu等對SRDC電機進行了改進,并將傳統(tǒng)的開關磁阻電機與SRDC電機在性能上做出了對比,證明其有著和開關磁阻電機相同的轉矩輸出及調速能力,但轉矩脈動更小[3]。X.Liu等提出 SRDC 電機可以作為同步電機來控制,采用矢量控制,并進行了實驗,證明SRDC電機采用矢量控制可以更好地減小噪聲和脈動[4]。
本文首先介紹SRDC電機的基本結構,并對根據(jù)文獻[5]中所提到的SRDC電機的數(shù)學模型進行分析,建立SRDC電機的Simulink電機本體模型,分析如何將矢量控制應用于SRDC電機中。
1 SRDC電機
SRDC電機結構如圖1所示,SRDC電機和傳統(tǒng)的開關磁阻電機相同,定轉子采用雙凸極結構。相比于傳統(tǒng)的開關磁電機,在定子上增加一層直流繞組作為勵磁使用,直流繞組串聯(lián)連接,連接方式如圖2所示;交流繞組采用4路并聯(lián)的方式,齒槽中的繞組,內層為交流繞組,外層為直流繞組。本文Magnet仿真試驗所采用的樣機,是一臺3相12/8極,額定功率5.5 kW,額定轉速1 500 r/min,直流繞組匝數(shù)為100匝,交流繞組匝數(shù)為180匝的SRDC電機。Magnet仿真運行時直流繞組通以1~2 A的直流電流,交流繞組通以三相互差120°的正弦交流電流,電機的三相繞組采用星形連接的方式。
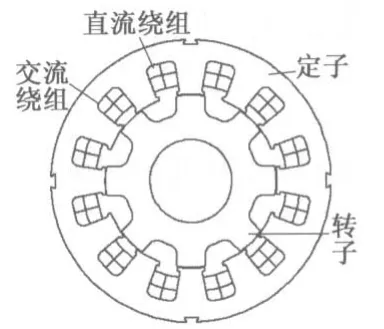
圖1 電機結構

圖2 電機直流繞組連接方式
2 SRDC電機數(shù)學模型
SRDC相電壓方程:

運動方程:

由于直流勵磁的存在,電機的磁鏈方程:

式中:Li表示每一相的自感;Mij表示相間互感;if表示勵磁電流。
Magnet分析電機磁鏈特性,A相通入24 A的直流,B,C相及直流繞組都不通電流的情況下,結果如圖3所示。可以看出,上述通電情況下A,B,C三相的磁鏈,交流繞組的相間互感相比于每一相的自感可以忽略不計。
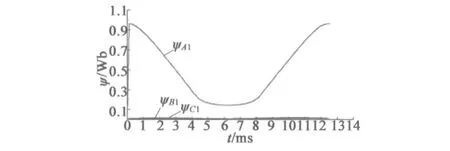
圖3 A相通電下的三相磁鏈
由于交流繞組之間的互感相比于每一相的自感可以忽略不計,式(3)可以改寫成如下形式。

交流繞組與直流繞組之間的互感,與交流繞組的相自感之間的比值為一常數(shù)Kf。可以由下式表示:
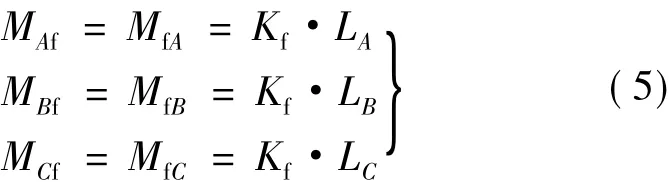
將式(2)、式(4)、式(5)代入式(1),可得到如下相電壓方程。

SRDC輸出轉矩由兩部分組成:一部分是由交流繞組產(chǎn)生的磁阻轉矩;另一部分是由直流繞組產(chǎn)生的勵磁轉矩。

式中:Trk表示磁阻轉矩;Tek表示勵磁轉矩;Nr表示轉子極數(shù)。
機械方程:

式中:T表示三相合成轉矩;Tl表示負載轉矩;J表示轉動慣量。
3 SRDC電機本體建模
通過Magnet計算電機的磁鏈,由于電機交流繞組采用四路并聯(lián)的方式,如圖4所示。A相通入4 A的直流電流,B,C相及直流繞組不通電的情況下,每個繞組會流過1 A的電流,測得A相的磁鏈。直流繞組為串聯(lián)連接的方式,直流繞組通入1 A的直流,交流繞組不通電的情況下,測得的曲線即為直流繞組與交流繞組之間的互感磁鏈,仿真結果如圖5所示。根據(jù)式(5)及圖5,可以得到Kf為3。
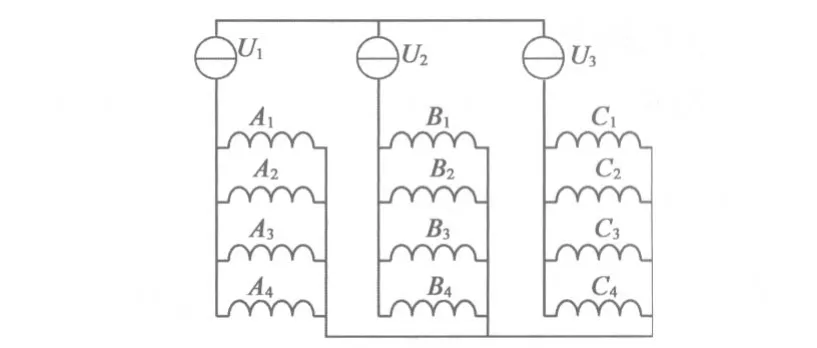
圖4 交流繞組連接方式

圖5 自感及互感曲線
本文的電感分布律采用余弦模型來近似等效:
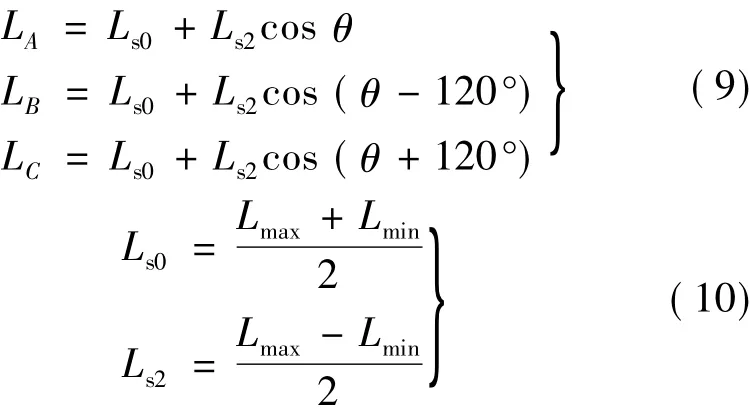
式中:Lmax,Lmin分別為交流繞組的最大電感和最小電感。Ls0=0.025 4 H,Ls2=0.022 1 H。
MTALAB中的Simulink電機本體的建模可采用兩種方法,一種利用有限元仿真軟件,根據(jù)電磁場分析計算出的電機電流隨著電感及位置變化的分布,建立電機模型;另一種是根據(jù)電機的數(shù)學解析模型建模。本文根據(jù)SRDC的數(shù)學模型對其電機本體進行建模。
根據(jù)式(5)~式(10)所介紹的SRDC數(shù)學模型,Simulink中建立的電機本體模型如圖6所示。三相模塊的內部結構如圖7所示。

圖6 電機本體模型
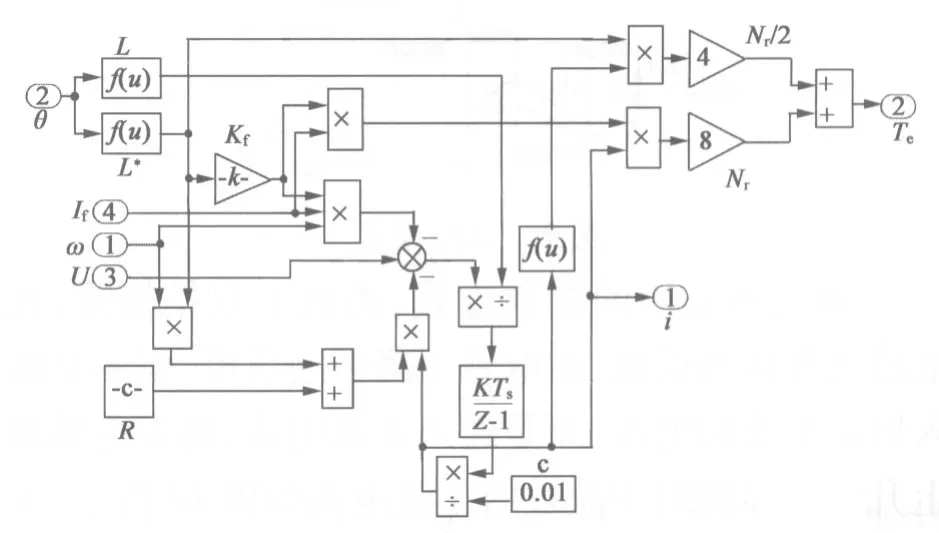
圖7 三相模塊內部結構
4 SRDC電機矢量控制系統(tǒng)
4. 1 SRDC電機控制方式
根據(jù)SRDC電機的轉矩公式(式(7))可知,由于電流平方項的存在,磁阻轉矩的正負與電流的正負無關,只與交流繞組自感的變化率有關。直流繞組一直通入正的電流,勵磁轉矩的正負,不僅與直流繞組和交流繞組之間互感的變化率有關,而且與交流繞組中流過電流的正負有關。
SRDC電機相比于傳統(tǒng)的開關磁阻電機,傳統(tǒng)的開關磁阻電機在電感上升區(qū)通電產(chǎn)生正的輸出轉矩,在電感下降區(qū)通電產(chǎn)生負的輸出轉矩;同樣SRDC電機在電感上升區(qū)也通電會產(chǎn)生正的磁阻轉矩,在電感下降區(qū)通電也會產(chǎn)生負的磁阻轉矩,但是無論在電感上升或下降區(qū),都產(chǎn)生正的勵磁轉矩。
文獻[6]提到此種類型的雙凸極電機有如下兩種控制方式。
(1)單拍模式:在電感上升區(qū)通正電,在電感下降區(qū)通負電,任一時刻只有一相通電,三相交替通電。通電方式如圖8所示。
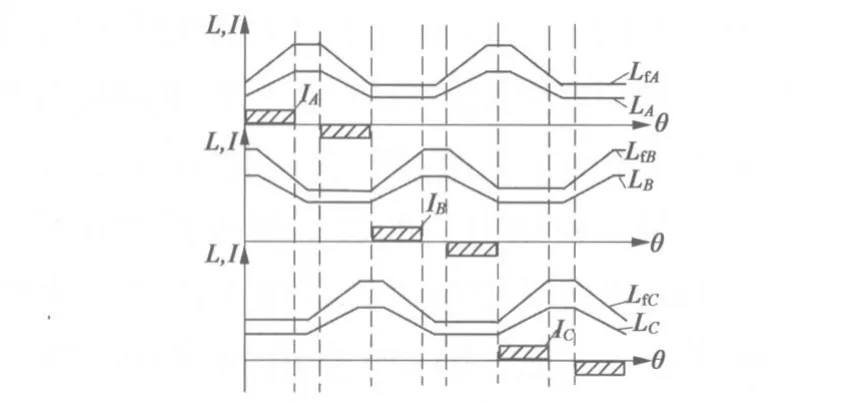
圖8 單拍模式
(2)雙拍模式:在電感上升區(qū)通正電,在電感下降區(qū)通負電,和單拍模式不同的是,雙拍模式任一時刻有兩相通電,如圖9所示。在雙拍模式下,通電兩相產(chǎn)生的磁阻轉矩基本抵消,輸出主要為勵磁轉矩。雙拍模式相比于單拍模式,轉矩脈動就更小。

圖9 雙拍模式
本文所采用的控制方式,類似于雙拍模式,在電感上升區(qū)通正電,在電感下降區(qū)通負電,但不是通入恒定不變的電流,而是通入正弦電流,隨著電感的上升和下降繞組中流過的正弦電流如圖10所示,矢量控制的目標就是控制功率電路,隨著電機電感的變化,電機繞組上流過的電流為圖示電流。圖10為一相的電流波形,3相的電流波形,形狀相同,相間互差 120°。
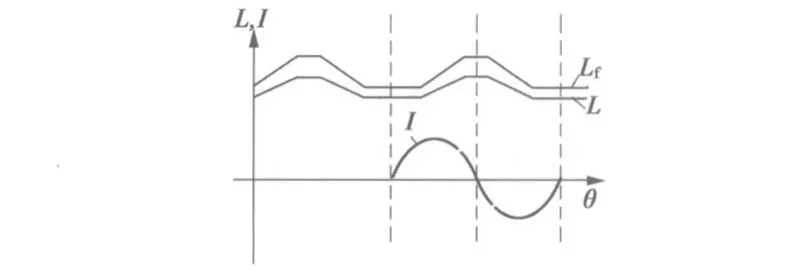
圖10 隨著電感變化的電流波形
4. 2 坐標變換
為使得SRDC電機繞組上可以流過正弦電流,電機的控制方式采用矢量控制。在矢量控制中,不能直接控制三相電流,要通過坐標變換,將三相靜止坐標系上的電流,變換為兩相旋轉坐標系上的電流來控制。首先將電流由三相靜止坐標系經(jīng)過Clarke變換至兩相靜止坐標系。

三相繞組星形連接,三相電流的和為0,即iA+iB+iC=0,所以iC可以由iA及iB來表示。
再經(jīng)過Park變換由兩相靜止坐標系變換為兩相旋轉坐標系上的電流。

本文所采用的矢量控制方式,要使交軸電流iq輸出為一個正的常數(shù),使直軸電流id輸出為0,即id=0。在dq電流經(jīng)過PI調節(jié)之后,iq輸出為一個正的常數(shù),id輸出為0的情況下,要經(jīng)過如下的Park逆變換,將電流由兩相旋轉坐標系,變換為兩相靜止坐標系,才可以計算占空比,控制開關電路,使電機輸出圖10的電流波形。

SRDC電機和傳統(tǒng)的開關磁阻電機采用的功率電路不同,傳統(tǒng)的開關磁阻電機采用三相不對稱半橋功率電路,SDRC電機,運行時三相繞組星形連接,要采用三相全橋功率電路,如圖11所示。建立整個控制系統(tǒng)框圖如圖12所示。

圖11 三相全橋功率電路

圖12 矢量控制系統(tǒng)
4. 3 仿真結果
在上述控制系統(tǒng)下,測定低速下的運行狀況,在給定轉速為20 rad/s,負載為10 N·m,勵磁電流為2 A的條件下,并調節(jié)電流及轉速環(huán)的PI參數(shù),運行整個系統(tǒng)。測得的轉速波形如圖13所示,電機起動時會有一些轉速波動的存在,當電機運行至0.20 s時,轉速達到平穩(wěn)。
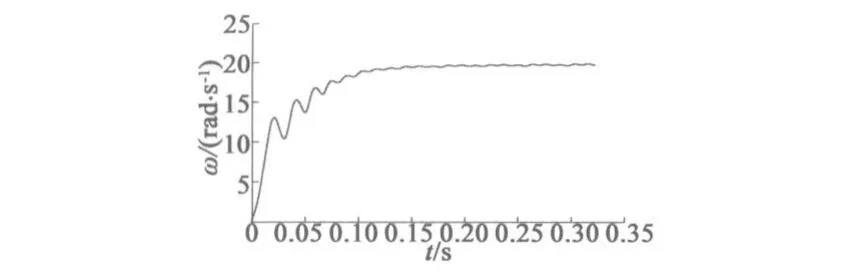
圖13 轉速波形
電流波形如圖14所示,轉矩波形如圖15所示,起動時電流較大,且波形有些不規(guī)則,在起動結束后電流波形是正弦波。
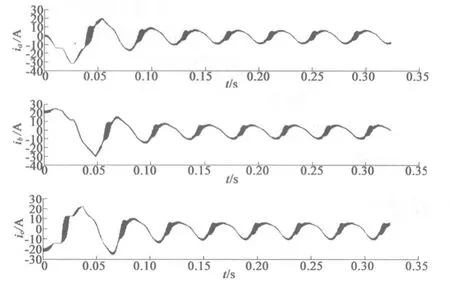
圖14 電流波形
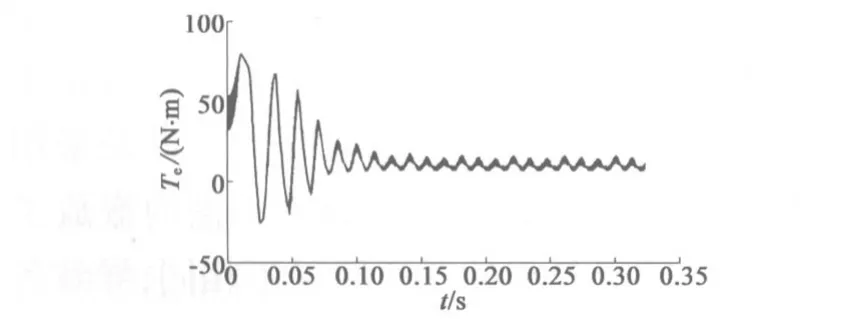
圖15 轉矩波形
4. 4 實驗結果
在實物平臺上對SRDC電機的矢量控制系統(tǒng)進行驗證,控制系統(tǒng)采用dsp28335芯片,主電路采用三相全橋功率電路。控制電路主要包括:開關電源,位置信號處理電路,電流檢測電路,驅動電路。在運行時通過直流電源供給電機直流繞組以恒定的電流。對一臺三相12/8極,額定功率5.5 kW,額定轉速1 500 r/min的SDRC電機進行空載低速的運行實驗。在一定給定轉速的條件下測得的電流波形如圖16所示。
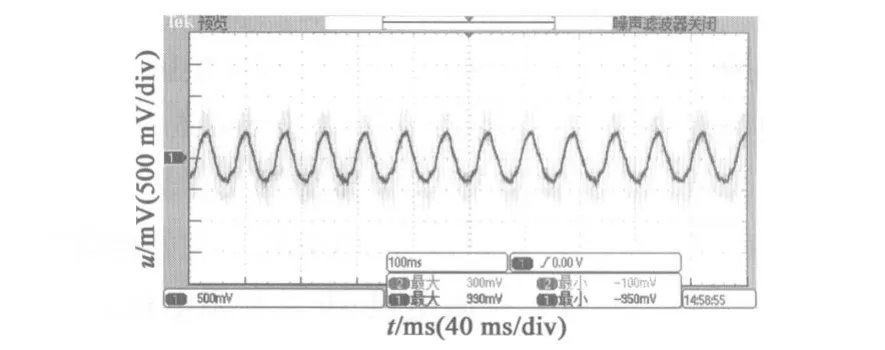
圖16 實測電流波形(截圖)
5 結 語
本文通過SRDC電機的數(shù)學模型,建立其電機本體模型,應用Magnet進行電機的磁鏈分析,并通過Simulink仿真SRDC電機的矢量控制系統(tǒng)。從仿真結果可以看出:矢量控制應用于SRDC電機,可以實現(xiàn)調速;但在應用矢量控制時,在電機繞組上產(chǎn)生的電流波形,不是關于坐標軸上的某一點中心對稱的正弦波,而是在豎直方向有一定的平移;輸出轉矩在電機平穩(wěn)運行時一直為正,但有一些轉矩脈動的存在。通過實物實驗驗證了仿真結果,實驗結果和仿真結果是相符合的。
[1] LIAO Y,LIPO T A.A new doubly salient permanent magnet motor for adjustable speed drives[J].Proceed.of Electric Machines and Power Systems,1994,22(2):259 -270.
[2] LI Y,LLOYD J D,HORST G E.Switched reluctance motor with DC assisted excitation[C]//Industry Applications Conference.IEEE,1996:810 -807.
[3] AZAR Z,ZHU Z Q.Comparative study of electromagnetic performance of switched reluctance machines under different excitation techniques[C]//Energy Conversion Congress and Exposition(ECCE).IEEE,2013:4334 -4341.
[4] LIUX,ZHUZQ.DC -link capacitance requirement and noise and vibration reduction in 6/4 switched reluctance machine with sinusoidal bipolar 3xcitation[C]//Energy Conversion Congress and Exposition(ECCE).IEEE,2011:1596 -1603.
[5] 婁偉,孫建忠,白鳳仙,等.具有直流勵磁的開關磁阻電機解析模型[J].大連理工大學學報,2016,56(1):50-55.
[6] 張樂.電勵磁雙凸極電機調速系統(tǒng)非線性建模與控制[D].南京:南京航空航天大學,2006.
[7] 湯新舟.永磁同步電機的矢量控制系統(tǒng)[D].杭州:浙江大學,2005.
[8] 徐文偉.永磁同步電機矢量控制的實現(xiàn)[D].廣州:華南理工大學,2013.