基于慣性導(dǎo)航的人員定位系統(tǒng)研究
2017-06-13 12:31:58汪少初
山東工業(yè)技術(shù) 2017年11期
關(guān)鍵詞:融合
摘 要:分析了全球衛(wèi)星導(dǎo)航系統(tǒng)(GNSS)、無線電定位和慣性導(dǎo)航定位各自的優(yōu)劣勢,提出基于慣性導(dǎo)航的人員定位系統(tǒng)設(shè)計(jì)。為減小系統(tǒng)隨時(shí)間的累計(jì)誤差,引入高精度地圖和精細(xì)化三維模型等基于場景的位置融合算法,最大限度地從系統(tǒng)誤差源等因素出發(fā),提出相應(yīng)的解決辦法以提高定位精度。
關(guān)鍵詞:慣性導(dǎo)航;定位;融合
DOI:10.16640/j.cnki.37-1222/t.2017.11.157
1 引言
近年來移動(dòng)GIS的迅猛發(fā)展,人們對定位與導(dǎo)航的精度需求也在不斷增長。公元十三世紀(jì),中國人發(fā)明了指南針并以此穿越南中國海。1942年德國在V-2火箭上率先應(yīng)用慣性導(dǎo)航系統(tǒng),極大地刺激了精確定位的需求。無線電技術(shù)的高速發(fā)展使得定位所需的若干解算參數(shù)均可通過研究無線電波的傳播特性得到,GNSS應(yīng)運(yùn)而生。
為了克服GNSS只能應(yīng)用于空曠室外的劣勢,基于UWB、Zigbee和RFID等低成本、低功耗、高精度的室內(nèi)定位方案相繼出現(xiàn),并呈現(xiàn)出實(shí)時(shí)定位的發(fā)展趨勢[1]。隨著慣性測量單元(IMU)性價(jià)比不斷提高,基于慣性導(dǎo)航的室內(nèi)定位技術(shù)已成為研究熱點(diǎn)。IMU與人體捷聯(lián),利用慣性導(dǎo)航原理計(jì)算行進(jìn)的步長、電子羅盤搭配陀螺儀可實(shí)時(shí)測量每一步前進(jìn)的方向,進(jìn)而推算人員的位置。
基于無線電的室內(nèi)定位方案,需要前期在定位所覆蓋的區(qū)域內(nèi)鋪設(shè)一定密度的參考定位信標(biāo),成本與區(qū)域的面積成正比。慣性導(dǎo)航系統(tǒng)的設(shè)備體積小,不需要在定位覆蓋的區(qū)域進(jìn)行前期的安裝和特征測量 [2],系統(tǒng)不受室內(nèi)還是室外環(huán)境的限制,成本僅與目標(biāo)的數(shù)量有關(guān),非常適合大規(guī)模應(yīng)用;劣勢在于系統(tǒng)的累計(jì)誤差隨時(shí)間呈指數(shù)增長[3]。如何減小累計(jì)誤差實(shí)現(xiàn)高精度室內(nèi)定位成為該領(lǐng)域研究的重點(diǎn)和難點(diǎn)。
2 基于慣性導(dǎo)航的人員定位系統(tǒng)
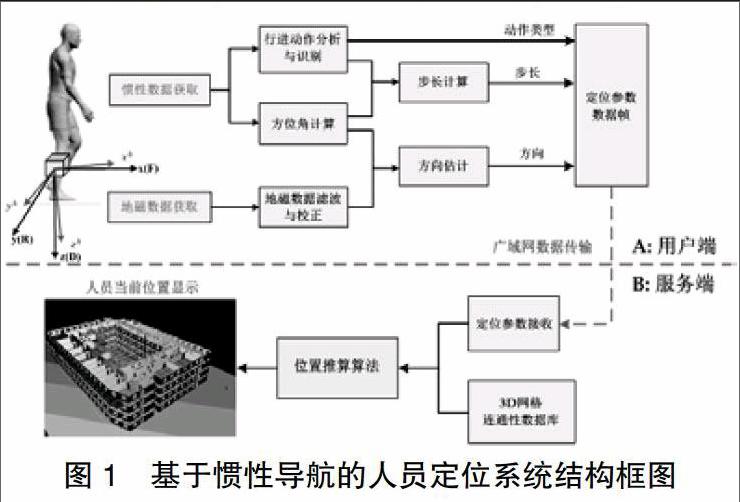
圖1給出了基于慣性導(dǎo)航的人員定位系統(tǒng)結(jié)構(gòu)框圖。系統(tǒng)分兩部分:用戶端和服務(wù)端。
用戶端的兩個(gè)組成部分包括數(shù)據(jù)采集和預(yù)處理。由于IMU中集成了慣性傳感元件和地磁計(jì),將前期設(shè)計(jì)開發(fā)的數(shù)據(jù)采集單元固定在人員的身體上,與人體捷聯(lián)。例如將采集單元固定在人員的腰部、脛骨處、腳后跟及腳尖等運(yùn)動(dòng)參數(shù)明顯且周期變化的位置上。數(shù)據(jù)預(yù)處理部分對采集單元采集的慣性傳感及磁力數(shù)據(jù)進(jìn)行預(yù)處理,將結(jié)果與相關(guān)的模式識別算法相結(jié)合,如機(jī)器學(xué)習(xí)等,對人員行進(jìn)的動(dòng)作進(jìn)行識別[4];利用慣性導(dǎo)航理論計(jì)算IMU的方位角,與系統(tǒng)可實(shí)現(xiàn)的動(dòng)態(tài)電子羅盤相結(jié)合,對每個(gè)步長的行進(jìn)方向進(jìn)行估計(jì);人員的動(dòng)作類型、步長和方向等位置推算的必要參數(shù)實(shí)時(shí)發(fā)送到服務(wù)端。
服務(wù)端的兩個(gè)組成部分為位置推算和位置服務(wù)。服務(wù)端在獲取到諸如人員的動(dòng)作類型、步長和方向等必要參數(shù)后,查詢當(dāng)前位置的空間屬性,推算人員當(dāng)前的具體位置。
3 位置推算與定位融合
位置推算過程中累積誤差一直參與后續(xù)的位置更新過程,且呈現(xiàn)指數(shù)級增長。在前期的研究過程中發(fā)現(xiàn),利用零速率修正(ZUPT)技術(shù),在每個(gè)位置推算的起始點(diǎn),將一些為零的中間參數(shù)強(qiáng)制設(shè)置為零,以切斷累計(jì)誤差在后續(xù)位置跟新過程中繼續(xù)迭代。
若采用ZUPT以后,推算的位置還是與高精度的地圖或三維模型的點(diǎn)位存在很大的差異,可利用其它的定位手段,如室外采用GNSS、室內(nèi)采用一定精度和成本的無線電定位方案,對推算的當(dāng)前位置進(jìn)行校正,達(dá)到與實(shí)際場景長期保持一致,實(shí)現(xiàn)定位融合。
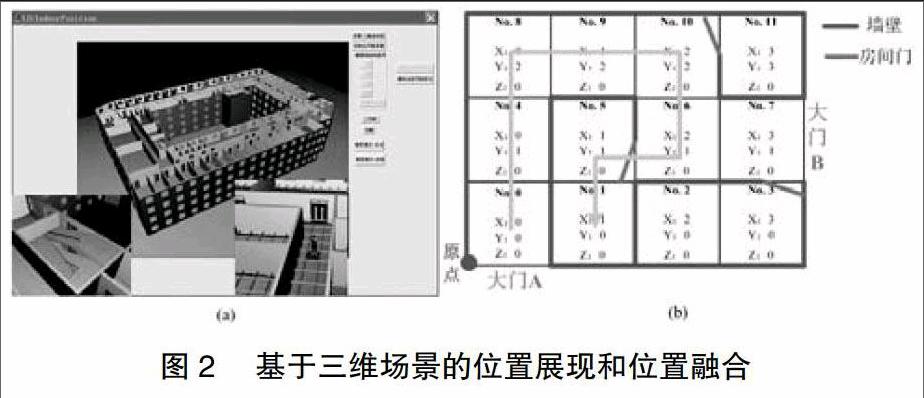
針對室內(nèi)環(huán)境的復(fù)雜程度不斷提高這一趨勢,本文提出了在三維空間內(nèi)實(shí)現(xiàn)室內(nèi)人員定位的想法,采用類VR場景來實(shí)時(shí)且動(dòng)態(tài)地呈現(xiàn)人員當(dāng)前的位置,直觀地展現(xiàn)基于慣性導(dǎo)航的室內(nèi)人員定位系統(tǒng)的效果,如圖2所示。同時(shí)可利用高精度的三維室內(nèi)場景對位置推算的定位方法進(jìn)行位置融合,進(jìn)一步提高室內(nèi)定位的精度。
4 結(jié)束語
人員定位技術(shù)是一個(gè)具有挑戰(zhàn)和機(jī)遇的研究課題,人員定位系統(tǒng)的構(gòu)建更是涉及方方面面,如傳感器/網(wǎng)技術(shù)、模擬/數(shù)字信號處理、位置融合與濾波等高新技術(shù)的交叉應(yīng)用。本文針對基于慣性導(dǎo)航技術(shù)的人員定位系統(tǒng)所涉及的關(guān)鍵問題展開了相關(guān)的研究。后續(xù)將對IMU本身的溫差偏移、測量噪聲等因素導(dǎo)致系統(tǒng)的定位誤差進(jìn)行研究。
參考文獻(xiàn):
[1]田增山,朝磊,邢培基等.行人導(dǎo)航系統(tǒng)中航跡推算參數(shù)估計(jì)方法的研究[J],電子技術(shù)應(yīng)用,2009:84-87.
[2]張?zhí)旃猓跣闫迹觖愊?捷聯(lián)慣性導(dǎo)航技術(shù)[J].北京:國防工業(yè)出版社,2010.
[3]汪少初.基于PDR的定位與跟蹤技術(shù)研究及系統(tǒng)設(shè)計(jì)[D].天津大學(xué),2014.
[4]徐光祐,曹媛媛.動(dòng)作識別與行為理解綜述[J].中國圖象圖形學(xué)報(bào),2009(02):189-195.
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
數(shù)學(xué)年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(shù)(2021年4期)2021-07-13 08:58:28
無線電通信技術(shù)(2021年3期)2021-06-08 03:33:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38