單軸自平衡扭扭車參數(shù)計算研究
2017-06-15 03:33:23翟偉良周元新徐文浩葉佐鎮(zhèn)
科學家 2017年6期
關(guān)鍵詞:結(jié)構(gòu)設計
翟偉良+周元新+徐文浩+葉佐鎮(zhèn)
摘 要 單軸自平衡扭扭車具有復雜的非線性系統(tǒng),是驗證各種控制算法的理想平臺。它具有行走靈活、便利、節(jié)能等特點,得到了很大的發(fā)展。主要用于短程交通,在城市短程交通中代替汽車,10km~20km的時速保證了城市交通的及時和安全性,小體積,小重量保證了攜帶的便捷性,行駛的靈活性,而在非機動車道行駛減少了機動車道空間的使用,減輕了城市交通的壓力,有著重要的理論研究意義和廣闊的應用前景。本文主要對結(jié)構(gòu)進行總布置設計,選型電機、減速器、電池等關(guān)鍵部件及計算研究參數(shù)。
關(guān)鍵詞 單軸自平衡扭扭車;參數(shù)計算;結(jié)構(gòu)設計
中圖分類號 G3 文獻標識碼 A 文章編號 2095-6363(2017)06-0002-02
1 研究背景和意義
隨著人們生活水平的提高,人均汽車保有量持續(xù)上升,致使交通擁擠問題及交通環(huán)保問題日益嚴重[ 1 - 2 ],交通阻塞導致時間和能源的嚴重浪費,影響著城市的效率,對我國經(jīng)濟的快速、持續(xù)、健康發(fā)展構(gòu)成嚴重威脅。人們急需一種新型的交通工具,扭扭車這種交通工具應運而生。
單軸自平衡扭扭車是一個高度不穩(wěn)定兩輪機器人,其動力學系統(tǒng)具有非線性、多變量、參數(shù)不確定、強耦合等特性[ 3 ],其通過陀螺儀和加速度儀兩個傳感器相結(jié)合來監(jiān)測車體所處的角度及變化率,再通過單片機計算出適當數(shù)據(jù)和發(fā)出相應的指令,驅(qū)動電動機產(chǎn)生前進或后退的加速度來達到平衡的效果。
2 主要性能參數(shù)
根據(jù)調(diào)查,一般扭扭車最高車速為15~25km/h,從靜止加速到最高車速所用時間為2~5s,能爬上的最高坡度為15~30°;因此確定單軸自平衡扭扭車動力性參數(shù)為:最高車速20km/h,加速時間3s,最大爬坡度20°。由于扭扭車作為短程代步交通工具,車速不宜過高,否則容易造成不穩(wěn)定性,降低安全系數(shù);加速時間是在車體允許的傾角下在平緩水泥路面連續(xù)加速到最高車速所用的時間,扭扭車反應靈敏,一般用很少時間就能達到高速運行狀態(tài);扭扭車為平路使用較多,偶爾會遇到上坡情況,因而設定最大爬坡態(tài)度20°,以滿足不同人群的需求。
由于扭扭車左右電機均可獨立控制,通過控制系統(tǒng)實現(xiàn)轉(zhuǎn)向差速控制,因此最小轉(zhuǎn)彎半徑為零,機動靈活。
2.1 電機參數(shù)
電機作為扭扭車的執(zhí)行器,所用運動都是由電機驅(qū)動完成,所以電機參數(shù)確定非常重要。需要計算電機的最大功率,最高轉(zhuǎn)速等參數(shù),本文中的扭扭車以最高車速運行時為額定工況,所需功率由以下計算所得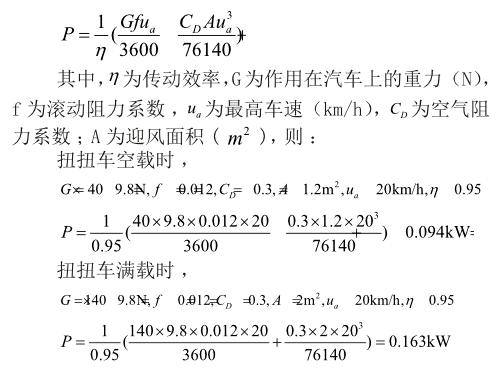
以上的計算是保證它的最高速度,但達到最高速度時,還需要扭扭車能夠保持平衡,所以就需要車在達到最高速度時,還保留足夠大的后備功率。通過實驗表明,電機的額定功率必須是計算所需功率的3倍以上。因此,本文選定輪轂電機主要參數(shù)是:額定電壓24V,額定功率500W,額定轉(zhuǎn)速4500r/min,額定扭矩1.06Nm。
2.2 傳動比
由電機額定轉(zhuǎn)速與整車最高車速之間關(guān)系確定傳動比。我們初定輪胎為14in,通過查表可得車輪的滾動半徑180mmr =,設定的最高車速20km/h333.3m/minv ==,車輪周長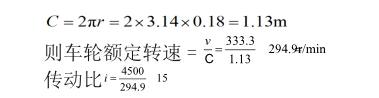
2.3 鋰離子電池
鋰離子電池參數(shù)確定關(guān)鍵是電池容量大小,可以通過整車巡航里程計算得到。由于受溫度、濕度、電池材料、使用情況等各種因素影響,電池不可能滿容量,更不可能完全放電,到一定電壓就會停止工作。因此,計算時設定了一個電池容量可用系數(shù)。
因此,選擇24V/15Ah串聯(lián)組裝的鋰電池組。
3 動力性能核算
3.1 加速時間核算
在額定功率下,設扭扭車從靜止加速到最高車速所需的時間為t,推導過程如下:
電機轉(zhuǎn)速
通過以上計算可得,本文設計的單軸自平衡扭扭車,在水平并且摩擦力良好的路面上,從靜止開始加速到最高車速20km/h,加速時間為2.4s,小于預設值3s,表明動力性良好。
3.2 最大爬坡度核算
扭扭車上坡時,主要受力為滾動阻力、坡度阻力和驅(qū)動力作用,其中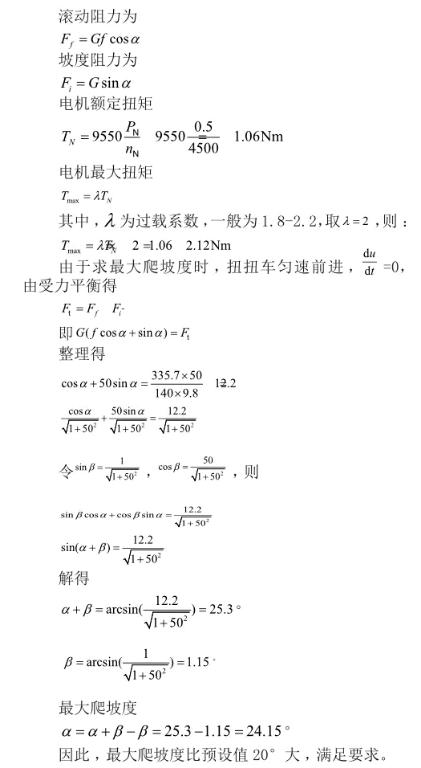
4 結(jié)論
本文主要對單軸自平衡扭扭車機械結(jié)構(gòu)進行了總布置設計:提出整車設計目標值,確定了整車布置形式;對關(guān)鍵部件進行了選擇,包括電機、減速器、電池等;進行參數(shù)設計,主要有總體結(jié)構(gòu)尺寸、質(zhì)量參數(shù)、性能參數(shù)、電機參數(shù)、傳動比大小、蓄電池參數(shù)等;對動力性進行校核,包括加速時間校核和最大爬坡度校核。
參考文獻
[1]郭繼孚,劉瑩,余柳.對中國大城市交通擁堵問題的認識[J].城市交通,2011,9(2):8-13.
[2]劉紹武.淺析汽車尾氣污染的現(xiàn)狀及其防治對策[J].中國環(huán)境管理,2011(4):31-34.
[3]付勇杰.基于神經(jīng)網(wǎng)絡的兩輪自平衡扭扭車的研究[D].山西:太原理工大學,2012.
猜你喜歡
建材發(fā)展導向(2023年6期)2023-03-31 02:51:38
建材發(fā)展導向(2022年6期)2022-04-18 08:17:26
建材發(fā)展導向(2021年11期)2021-07-28 06:57:42
建材發(fā)展導向(2021年7期)2021-07-16 07:07:28
防爆電機(2020年4期)2020-12-14 03:11:14
中國核電(2017年1期)2017-05-17 06:10:04
電子制作(2016年1期)2016-11-07 08:43:05
專用汽車(2016年5期)2016-03-01 04:14:49
專用汽車(2016年5期)2016-03-01 04:14:48
中國房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:23