一種基于OV7670視覺系統(tǒng)的類人機(jī)器人設(shè)計(jì)
2017-06-16 14:59:15王小龍黃志強(qiáng)張?jiān)姮?/span>李林張旺
科技創(chuàng)新與應(yīng)用 2017年17期
王小龍+黃志強(qiáng)+張?jiān)姮?+李林+張旺

摘 要:為解決類人機(jī)器人雙機(jī)械臂抓取目標(biāo)過程中,存在目標(biāo)識(shí)別不準(zhǔn)確、目標(biāo)識(shí)別單一、雙機(jī)械臂運(yùn)動(dòng)不協(xié)調(diào)等問題,文章設(shè)計(jì)了一款基于OV7670彩色攝像機(jī)視覺系統(tǒng)及高仿真機(jī)械臂的類人機(jī)器人。通過OV7670和STM32主控模塊對(duì)圖像信息進(jìn)行采集與處理,使用RGB-SHL顏色空間轉(zhuǎn)換模型提取目標(biāo)對(duì)象的圖像特征,產(chǎn)生控制指令,然后將協(xié)調(diào)控制每一個(gè)舵機(jī)的運(yùn)動(dòng)參數(shù)發(fā)送給舵機(jī)驅(qū)動(dòng)模塊,以實(shí)現(xiàn)類人機(jī)器人識(shí)別目標(biāo)、定位目標(biāo)、協(xié)調(diào)運(yùn)動(dòng)和精確控制等功能。通過實(shí)驗(yàn)驗(yàn)證和參加華北五省(市、自治區(qū))大學(xué)生機(jī)器人大賽,表明該機(jī)器人具有對(duì)目標(biāo)識(shí)別準(zhǔn)確、協(xié)調(diào)運(yùn)動(dòng)精確可靠的優(yōu)點(diǎn)。
關(guān)鍵詞:類人機(jī)器人;識(shí)別定位;RGB-SHL顏色空間;彩色攝像機(jī)
引言
類人機(jī)器人利用傳感器獲取信息從而控制機(jī)器人的動(dòng)作[1]。目前,簡易類人機(jī)器人主要是利用紅外、超聲波、線性CCD等傳感器作為識(shí)別系統(tǒng),以完成尋跡、避障、抓取等功能。例如,部分DARwIn系列類人機(jī)器人采用紅外傳感器,此類機(jī)器人的識(shí)別模式較為單一:紅外、超聲波只能對(duì)物體進(jìn)行探測且多用于尋跡和避障;線性CCD通過灰度值來檢測目標(biāo),但是受環(huán)境的光照因素影響較大,且圖像采集的范圍極其有限,不利于機(jī)器人在未知環(huán)境中感知與行動(dòng)。本文將介紹一種基于OV7670彩色攝像機(jī)視覺系統(tǒng)的類人機(jī)器人,該機(jī)器人可對(duì)目標(biāo)的顏色、形狀進(jìn)行識(shí)別,并可對(duì)圖像信息進(jìn)行二次開發(fā),建立以機(jī)器人為原點(diǎn)的坐標(biāo)系,從而得到目標(biāo)的距離、位置、形狀等信息,實(shí)現(xiàn)尋跡、避障、抓取等功能。
1 系統(tǒng)總體設(shè)計(jì)
該設(shè)計(jì)從底層硬件設(shè)計(jì)入手:搭建經(jīng)典的簡易類人機(jī)器人平臺(tái);將其與自主設(shè)計(jì)的仿人機(jī)械手臂融合;在機(jī)器人的頭部安裝OV7670彩色攝像機(jī),用舵機(jī)控制其轉(zhuǎn)動(dòng);在機(jī)器人胸部安裝STM32F103ZET6主控板,從而完成硬件設(shè)計(jì)。進(jìn)一步是上層的軟件設(shè)計(jì):以STM32F103ZET6主控板為平臺(tái),RGB-SHL顏色空間轉(zhuǎn)換公式為核心,通過對(duì)攝像機(jī)采集的圖像信息進(jìn)行處理,得出目標(biāo)的坐標(biāo)信息,產(chǎn)生控制指令,向舵機(jī)驅(qū)動(dòng)模塊發(fā)送相應(yīng)的舵機(jī)控制參數(shù),以控制機(jī)器人協(xié)調(diào)運(yùn)動(dòng)和精確操作。結(jié)構(gòu)框圖如圖1所示。
圖1 系統(tǒng)總體框圖
2 硬件系統(tǒng)設(shè)計(jì)
2.1 類人機(jī)器人本體設(shè)計(jì)
類人機(jī)器人本體是機(jī)器人的執(zhí)行機(jī)構(gòu),主要由頭部、身軀、雙足、雙臂、雙爪等機(jī)械結(jié)構(gòu)組成。各部分由鋁合金散件和雙軸數(shù)字舵機(jī)相互連接構(gòu)成。
仿生手爪設(shè)計(jì):每個(gè)都有五根手指,每根手指有三個(gè)指節(jié),指節(jié)中空,每根手指通過扎帶聯(lián)接固定于一個(gè)力矩為15KG的舵機(jī)上,通過舵機(jī)轉(zhuǎn)動(dòng)改變?cè)鷰У乃删o程度,從而使機(jī)械手爪自由“松-握”,達(dá)到抓放的目的。
2.2 OV7670模塊
該機(jī)器人由OV7670攝像機(jī)和一自由度的伺服單元構(gòu)成視覺系統(tǒng),OV7670攝像機(jī)的所有圖像處理功能過程包括伽馬曲線、白平衡、度、色調(diào)等都可以通過SCCB接口編程。
2.3 MCU模塊
該機(jī)器人的決策控制系統(tǒng)由STM32F103ZET6為核心的主控模塊構(gòu)成,主控模塊的作用是將視覺系統(tǒng)采集的圖像信息進(jìn)行處理,根據(jù)目標(biāo)的位置及自身的位姿,產(chǎn)生控制指令,通過串口將對(duì)應(yīng)的控制參數(shù)傳送到舵機(jī)驅(qū)動(dòng)模塊,控制類人機(jī)器人本體執(zhí)行相應(yīng)的動(dòng)作。
2.4 人機(jī)交互顯示模塊
該機(jī)器人使用OV7670攝像機(jī)的QVGA格式(320*240)輸出,與所使用的TFTLCD顯示屏的最大分辨率保持一致。采集的圖像實(shí)時(shí)顯示在顯示屏上,并且可以在顯示的圖像上標(biāo)記出被識(shí)別的目標(biāo)。結(jié)合獨(dú)立按鍵,可以改變圖像的白平衡、度、色調(diào),從而可以根據(jù)不同的環(huán)境選擇不同的圖像輸出模式。
2.5 舵機(jī)驅(qū)動(dòng)模塊
舵機(jī)驅(qū)動(dòng)模塊采用32位ARM內(nèi)核的處理器芯片以及USB和UART通訊接口,通過接收MCU控制信號(hào)產(chǎn)生PWM信號(hào)驅(qū)動(dòng)各關(guān)節(jié)舵機(jī),使機(jī)器人執(zhí)行規(guī)定動(dòng)作,電壓過低時(shí)具有自動(dòng)斷電和報(bào)警功能,防止舵機(jī)損壞。
3 軟件系統(tǒng)設(shè)計(jì)
本文研究的對(duì)象是基于OV7670視覺系統(tǒng)的類人機(jī)器人協(xié)調(diào)運(yùn)動(dòng)控制,此處以機(jī)器人對(duì)投籃項(xiàng)目的實(shí)現(xiàn)過程進(jìn)行算法分析。
3.1 控制策略概述
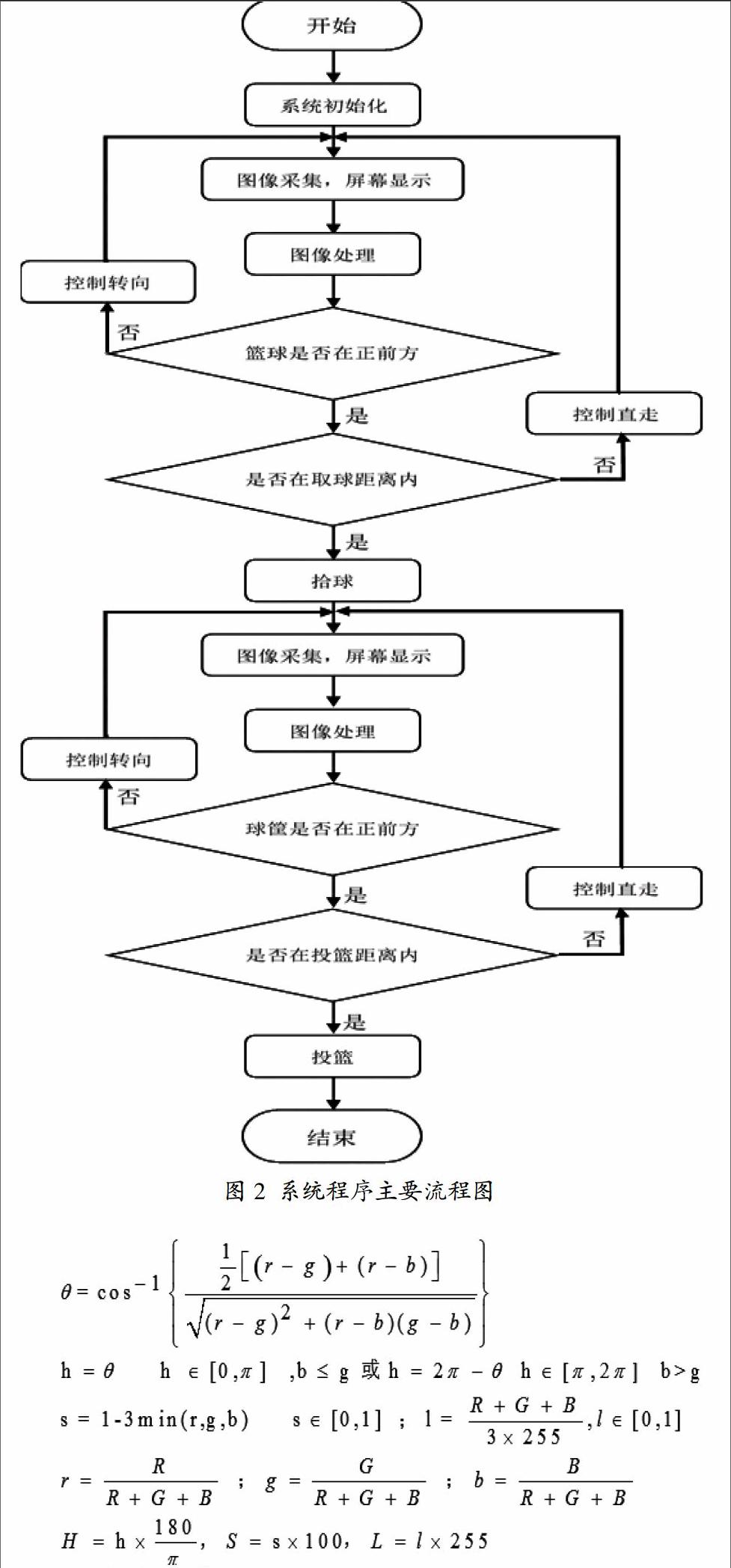
開啟該系統(tǒng)后,系統(tǒng)首先初始化各個(gè)模塊,然后進(jìn)入拾球循環(huán)。攝像機(jī)采集圖像數(shù)據(jù),經(jīng)圖像處理后得到機(jī)器人距籃球的距離和籃球偏離機(jī)器人正豎直中垂線的程度,當(dāng)偏離程度大于規(guī)定值時(shí),控制機(jī)器人轉(zhuǎn)向減小偏離程度,當(dāng)距離大于拾球距離時(shí),控制機(jī)器人直走減小距離。當(dāng)?shù)竭_(dá)拾球距離后,控制機(jī)器人拾起籃球,然后進(jìn)入投籃循環(huán)。同樣攝像機(jī)采集圖像數(shù)據(jù),經(jīng)圖像處理后得到機(jī)器人距籃框的距離和籃框偏離機(jī)器人正豎直中垂線的程度,當(dāng)偏離程度大于規(guī)定值時(shí),控制機(jī)器人轉(zhuǎn)向減小偏離程度,當(dāng)距離大于投籃距離時(shí),控制機(jī)器人直走減小距離。當(dāng)?shù)竭_(dá)投籃距離后,控制機(jī)器人投籃,程序結(jié)束。具體的程序流程框圖如圖2所示。
3.2 顏色空間及其轉(zhuǎn)換
OV7670彩色攝像機(jī)輸出的圖像格式是RGB565,即RGB顏色空間[2]。在該設(shè)計(jì)的研究制作過程中,發(fā)現(xiàn)采用RGB顏色空間識(shí)別目標(biāo),易受環(huán)境如光照的影響,導(dǎo)致目標(biāo)識(shí)別不準(zhǔn)確;采用SHL顏色空間[3]則有效的解決了上述問題。以下是RGB-SHL顏色空間轉(zhuǎn)換公式。
3.3 識(shí)別算法設(shè)計(jì)
MCU接收OV7670采集的RGB圖像并對(duì)該圖像的像素點(diǎn)進(jìn)行逐行掃描,每掃過一個(gè)像素點(diǎn)(該機(jī)器人采用隔點(diǎn)掃描)都計(jì)算出該像素點(diǎn)的SHL值,與預(yù)定顏色的SHL值作比較,在允許的誤差范圍內(nèi),即認(rèn)為該像素點(diǎn)是預(yù)定顏色的像素點(diǎn),對(duì)其進(jìn)行標(biāo)記,同理可標(biāo)記出目標(biāo)的其他像素點(diǎn),形成顏色域,從而確定目標(biāo)在機(jī)器人整個(gè)視野中的位置及形狀。通過查詢,預(yù)定顏色的SHL值:黃色 S:55 H:40 L:52;綠色 S:100 H:120 L:45;品紅:S:100 H:339 L:47等。
3.4 定位算法設(shè)計(jì)
機(jī)器人視覺系統(tǒng)所采用的單攝像機(jī)只可采集二維平面圖像,但是要實(shí)現(xiàn)機(jī)器人對(duì)空間內(nèi)球體的抓取和投遞,必須要判斷機(jī)器人到空間球體的距離。在已知球體半徑R,攝像機(jī)安裝高度H及攝像機(jī)視野俯角α、β,攝像機(jī)豎排像素點(diǎn)總數(shù)為N,并對(duì)球體顏色識(shí)別度較高的情況下,球中心距底邊為X個(gè)像素點(diǎn),θ為攝像機(jī)到球心中點(diǎn)連線的俯角,可通過以下公式計(jì)算機(jī)器人到空間球體的距離D。
3.5 協(xié)調(diào)運(yùn)動(dòng)算法設(shè)計(jì)
機(jī)器人執(zhí)行的動(dòng)作是對(duì)環(huán)境反映的直接輸出結(jié)果,步態(tài)規(guī)劃[4]對(duì)類人機(jī)器人的雙臂協(xié)調(diào)運(yùn)動(dòng)十分重要。直線行走,左轉(zhuǎn)20度,右轉(zhuǎn)20度、蹲下、抱球、投球等動(dòng)作的不同使得每個(gè)自由度的運(yùn)動(dòng)參數(shù)大有不同,但設(shè)計(jì)中考慮的中心思想是每個(gè)動(dòng)作在執(zhí)行中與執(zhí)行后的機(jī)器人的重心都要保持在合理的范圍內(nèi),使其具有良好的穩(wěn)定性。
類人機(jī)器人步態(tài)設(shè)計(jì)、雙臂協(xié)調(diào)運(yùn)動(dòng)設(shè)計(jì)都是通過上位機(jī)軟件設(shè)置與調(diào)試的。其中直線行走要確保左右邁出的步伐距離相同。左右轉(zhuǎn)彎有兩種轉(zhuǎn)彎方式,即邊前進(jìn)邊轉(zhuǎn)彎和原地轉(zhuǎn)彎的方式。由于考慮到機(jī)器人對(duì)環(huán)境掃描做出的反饋的準(zhǔn)確性,該機(jī)器人采用原地轉(zhuǎn)彎的方式。在設(shè)計(jì)轉(zhuǎn)彎時(shí),通過改變轉(zhuǎn)彎腳劃出的距離大小與其執(zhí)行時(shí)間長短來達(dá)到理想的轉(zhuǎn)彎動(dòng)作。抱球動(dòng)作的設(shè)計(jì)主要考慮兩點(diǎn),其一是球位置的不確定性,設(shè)計(jì)時(shí)要盡量擴(kuò)大抓球的區(qū)域面積;其二是球容易滾動(dòng),設(shè)計(jì)時(shí)要確保球在機(jī)械爪上受力合理。抱球后的行走、轉(zhuǎn)彎類似于沒有抱球的情況,需要強(qiáng)調(diào)的是由于球和機(jī)械手臂前移時(shí)使重心整體前移,設(shè)計(jì)動(dòng)作時(shí)可以后仰以達(dá)到抵消重心前移目的。投球要確保雙臂對(duì)球的作用力大小相近,方向一致,而且執(zhí)行動(dòng)作時(shí)間要短,動(dòng)作完成后要穩(wěn)。
4 實(shí)驗(yàn)分析
該機(jī)器人設(shè)計(jì)完成后,參加了華北五省(市、自治區(qū))大學(xué)生機(jī)器人大賽,驗(yàn)證了該機(jī)器人的性能。實(shí)踐證明,該系統(tǒng)能夠準(zhǔn)確識(shí)別籃球與籃筐、定位籃球與籃筐,從而產(chǎn)生控制指令,控制機(jī)器人準(zhǔn)確完成任務(wù)。
5 結(jié)束語
本文設(shè)計(jì)了基于OV7670視覺系統(tǒng)及仿真機(jī)械臂的類人機(jī)器人。通過實(shí)踐,證明該機(jī)器人具有目標(biāo)識(shí)別準(zhǔn)確、步態(tài)穩(wěn)定性好、操作準(zhǔn)確可靠等優(yōu)勢。在對(duì)多種不同顏色、形狀的目標(biāo)(籃球和球筐)的識(shí)別過程中,該機(jī)器人視覺系統(tǒng)都發(fā)揮出了其準(zhǔn)確的識(shí)別性能,配合仿真機(jī)械臂精確地完成了抓取投放任務(wù)。該機(jī)器人在2016年華北五省(市、自治區(qū))大學(xué)生機(jī)器人大賽天津分賽區(qū)獲得籃球項(xiàng)目第一名,北京總決賽籃球項(xiàng)目第一名。
參考文獻(xiàn)
[1]馮占英,李勇霞,盛洪.自主機(jī)器人制定顏色形狀屬性物體的識(shí)別方法[J].北京聯(lián)合大學(xué)學(xué)報(bào):自然科學(xué)版,2011(3).
[2]蔡詠梅,郭文強(qiáng),張琳琳,等.RG B空間平均顏色矢量法在顏色識(shí)別中的研究[J].計(jì)算機(jī)應(yīng)用與軟件,2014(5):177-179.DOI:10.3969/j.issn.1000-386x.2014.05.045.
[3]袁奮杰,周曉,丁軍,等.基于FPGA的RGB和HSV色空間轉(zhuǎn)換算法實(shí)現(xiàn)[J].電子器件,2010,33(4):493-497.DOI:10.3969/j.issn.1005-9490.2010.04.023.
[4]湯中華,劉莉,陳懇,等.類人機(jī)器人耦合步態(tài)規(guī)劃與實(shí)驗(yàn)研究[J].機(jī)械設(shè)計(jì)與制造,2013(1):52-54.DOI:10.3969/j.issn.1001-3997.201
3.01.019.
作者簡介:王小龍(1995-),男,漢族,云南省曲靖市,中國民航大學(xué),本科在讀,電氣工程及其自動(dòng)化。
