基于Petri網的交通信號控制系統的建模與分析
2017-06-17 16:57:57萬錚
無線互聯科技 2017年9期
萬錚
摘 要:隨著物聯網的發展,智能交通的應用前景廣闊。文章提出一種基于Petri網建模的智能交通信號控制系統,其特點是局部控制、共同負責。交通信號控制系統基于安裝在車道上的車輛檢測器反饋信息,改變信號相位順序來提高路口的道路使用率。經過仿真模擬,該模型在安全前提下能夠有效減少車輛排隊等候時間。
關鍵詞:交通物聯網;Petri;智能交通;信號控制
1 互聯網發展研究概述
互聯網發展至今,經歷了文件互聯(Internet of Document,IoD)、人聯網(Internet of Human,IoH)到如今的物聯網(Internet of Things,IoT)3個階段。國際電信聯盟(ITU)對于物聯網的定義為[1]:將各種傳感設備和互聯網結合起來而形成一個巨大的網絡,讓所有物品都連接在一起,方便識別和管理。由以上定義可知物聯網的核心還是互聯網,其通過傳感器、射頻識別裝置(Radio Frequency Identification Device,RFID)、執行器等設備與物理世界發生聯系。
自從2009年溫家寶主席提出“感知中國”至今,物聯網在中國迅猛發展,與各傳統行業緊密結合,催生了各種基于物聯網的智能系統應用。包括基于物聯網的智能交通監控系統,其通過采集、分析數據,對駕駛員進行引導和管理來反饋交通狀況。交通監控系統可分為交通信息采集子系統、交通信息提供子系統、監控中心。
本文旨在提出一種基于Petri網結合前端分布式的物聯網體系結構的交通信號控制建模方式,以提供服務為目標,實現“高度自治下的共同負責制”。
2 路口模型
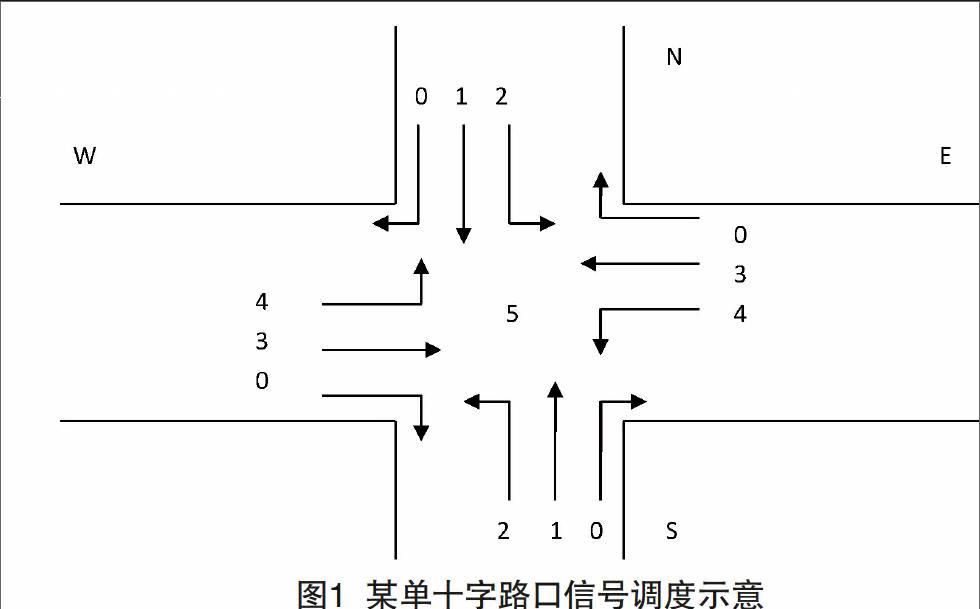
在單路口的交通調度中,主要需要考慮的設計是信號燈的相位順序和相位延時,圖1為某單十字路口信號調度示意。
在圖1中,車道5表示設計為行人通過,此車道與其他所有車道互斥,如此便可實現人、車完全分離,避免行人與右轉車和左轉車發生沖突的可能性,且NS與WE兩個方向的行人可以同時放行,車道0為4個方向的右轉車道,右轉車道只和車道5沖突,故車道根據空間關系可按以下情況分組,車道0,1為一組,車道0,2為二組,車道0,3為三組,車道0,4為4組,車道5單獨為五組,共計5個相位。其中N,S,W,E表示北、南、西、東4個方向,P表示行人通過,NS表示方向由北往南,其他以此類推。需要說明的是,由于右轉車除了和行人沖突外,和其他所有方向的通行車不沖突,故SE,EN,NW,WS 4個方向的右轉車在前4組相位中全部允許通過。
控制系統主要控制的是相位順序和相位延時。相位順序在控制上,除非某個相位無車輛,否則不應改變相位順序,依舊按照每組順序不變。相位延時在控制上,則可根據各個車道排隊等候車輛的數量,依據策略,由路口交通信號調度控制器上下浮動,力求增加路口利用率,降低車輛等待時間,同時兼顧公平。
3 信號控制模型分析
目前應用最多的信號控制基本場景是一個開環控制結構,5個相位的控制延時按照既定程序執行。開環結構的優點在于實施簡單,缺點在于缺乏反饋,無法根據交通狀況進行調整。
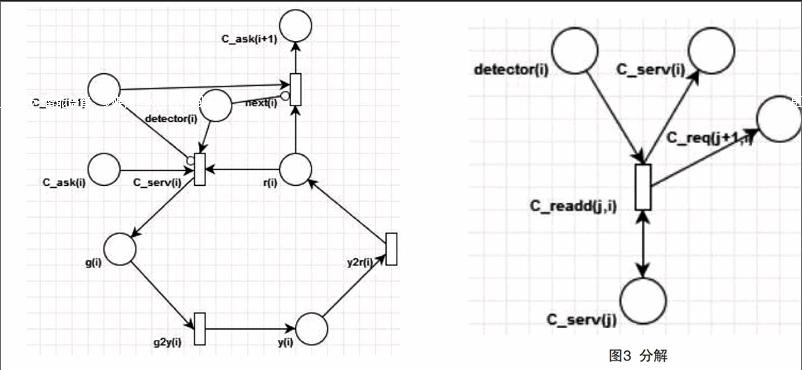
圖2為某一相位變遷圖,用C_serv(i)表示對某一相位提供服務。一個相位的動作包括變綠燈、變黃燈和變紅燈3個動作,變綠燈動作包含在C_serv(i)當中,變黃燈和變紅燈兩個動作分別用g2y(i)和y2r(i)表示。用C_ask(i)表示詢問相位i是否需要服務,next(i)表示轉向相位i的下一個相位,當detector(i)沒有托肯,即當前相位i沒有服務請求,且后面相位有服務請求,即C_req(i+1)有托肯時,應跳過相位i的服務,所以有detector(i)到next(i)的約束弧。如果后面相位沒有服務請求,則不能跳過當前相位服務,所以有C_req(i+1)到C_serv(i)的約束弧。
對車道的服務按照車道相位順序來進行,當所有的路口都沒有服務請求時,則按順序動作。當相位1為綠燈時,假如此時相位4有車也要通過路口,則需在相位1對相位4進行分解,稱為C_readd(1,4)。有detector(4)=C_req(2)+C_req(3)+C_req(4)+C_serv(4)。則系統在相位1周期完成后,由于detector(2)和detector(3)沒有托肯,將跳過相位2和3,直接轉向相位4提供服務。如圖3所示,在相位j分解detector(i)的變遷稱為c_readd(j, i)。用C_req(n,m)表示從C_req(n)到C_req(m)這幾個庫所。
4 結語
交通信號控制系統是交通物聯網的一個組成部分,本文基于Petri網理論提出了開環結構的交通信號控制系統,通過安裝在車道上的車輛檢測器感知排隊等候的車輛,進而反饋給交通信號控制系統。控制系統體系結構采用前端分布式控制,由各個路口的控制芯片自主控制,通過回饋的交通信號,靈活改變信號控制系統的相位順序,從而提高路口的道路使用率。