電動汽車的熱門主驅
——開關磁阻電機
2017-06-19 19:25:05陳天殷
汽車電器 2017年5期
張 虎,陳天殷
(1.北汽福田歐輝環境裝備事業部 技術中心液壓電控部電控科,湖南 長沙 410100;2.美國亞派克機電(杭州)有限公司,浙江 杭州 310013)
電動汽車的熱門主驅
——開關磁阻電機
張 虎1,陳天殷2
(1.北汽福田歐輝環境裝備事業部 技術中心液壓電控部電控科,湖南 長沙 410100;2.美國亞派克機電(杭州)有限公司,浙江 杭州 310013)
介紹開關磁阻電機及其驅動系統的原理結構和特點、特性,以及應用前景。
開關磁阻電機;工作電壓;使用溫度范圍;工作壽命;可靠性
1 開關磁阻電機異軍突起
為應對人們對礦物燃料儲量的憂慮,環境保護標準、汽車能效和環保法規日益嚴格,消費者對綠色節能、安全、便捷和舒適度提出了更高的要求,推動了電動汽車的發展。計算機技術和電力電子技術(或稱為大功率、高速率的開關電子器件)為大功率汽車主驅電機的有效控制提供了保障。作為電動汽車熱門的主驅電機——開關磁阻電機(Switched Reluctance Motor,簡稱SRM)及其控制調速系統有著免維護、控制簡捷便利、啟/制動性能好、較佳的動態運行性能和穩態精度、運行效率高、可靠性優異、環境適應性強、成本低等特點。正快速普及至家用電器、工礦機械、自動化設備、電子工程、航空、航天及電動車輛等國民經濟各領域。
2 開關磁阻電機的工作原理及其驅動系統
2.1 結構
開關磁阻電機硅鋼片疊壓帶繞組的定子磁極和“齒槽”形的轉子磁極有不同的極對數。定子極數與轉子齒槽數不能相等,又必須相近。只有兩者相近,才能加大定子相繞組電感隨轉角變化的平均變化率,這是提高電機出力的重要條件。定子繞組可配置為三相、四相、五相等多種類型,定子繞組的組數與其類型相對應。相數較大,其轉矩脈動會較小。圖1為拆解的開關磁阻電機的定轉子。

圖1 拆解的開關磁阻電機的定轉子
圖2為8/6極SRM的定轉子透視圖,用4種色彩表示繞組,繞組連接成四相。
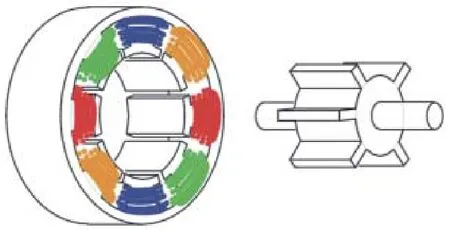
圖2 8/6極SRM的定轉子
當前,開關磁阻電機其定子磁極數和轉子齒極數必須有規律的相差。以四相(8/6)結構和三相(12/8)結構應用較多。
2.2 原理
開關磁阻電機不同于由電磁感應作用產生轉矩的傳統交直流電機,它是由磁路中定轉子間氣隙磁阻變化的原理產生轉矩——磁阻轉矩。開關磁阻電動機是因勵磁繞組通斷狀態的變換皆受開關控制而獲名。
圖3為定轉子8/6極的開關磁阻電機,其橫截面中定子直徑方向上一對磁極繞組形成一相電路。
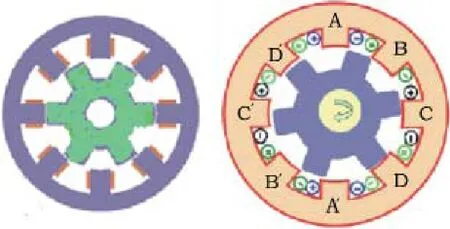
圖3 8/6極的開關磁阻電機的橫截面
開關磁阻電機運行原理為:磁通總是要沿著磁阻最小的路徑閉合,轉子磁極與定子磁極主軸線相重合時,即是磁阻最小位置,于是就促使轉子向最小磁阻的位置轉移,勵磁繞組依次通電,即作用產生旋轉轉矩,從而形成旋轉的磁場。圖4所示的轉矩作用,類同于勵磁的電磁鐵吸引鐵磁物質而產生拉動轉子轉動的現象。
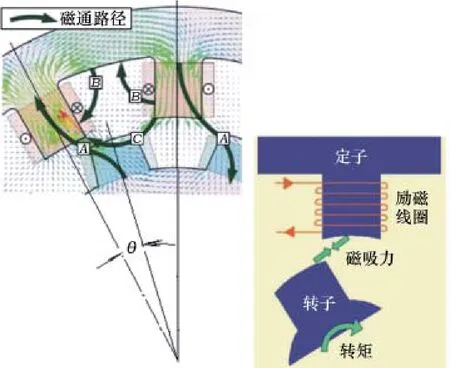
圖4 最小磁阻原理使SRM產生旋轉轉矩
圖5展示了四相(8/6極)結構的開關磁阻電機的運行原理。圖5中S1、S2是電子開關,D1、D2為二極管,U是直流電源。定轉子磁極對數的差異,使電動機磁路的磁阻隨著定轉子磁極中心線的重合或錯位的不同角度而變化。磁阻反比于電感量,當定轉子磁極的中心線相重疊時,相繞組電感量最大,這段磁路有最小的磁阻;而當定子磁極的中心線與轉子兩極間(相當于“槽”)的中心線對準時,該段磁路磁阻最大,相繞組電感量最小。正因如此,SRM在一些文獻中亦被稱為可變磁阻電機。
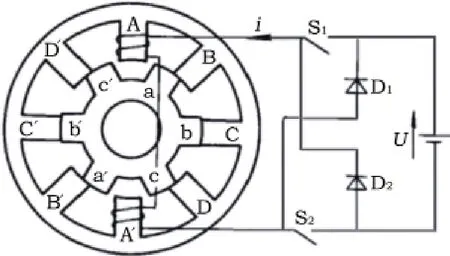
圖5 一對磁極通電的情況
圖5中僅標出A相勵磁繞組及其供電電路。“磁阻最小原理”揭示磁通會沿著磁阻最小途徑閉合,轉子的凸極中心軸線與勵磁定子凸極磁場軸線相重合時,磁路有最小磁阻。亦即通電的一組勵極對產生的磁通會追逐到最近的磁導體閉合磁通,由于磁通總是沿磁阻最小的路徑閉合,而產生力矩,將轉子由通電0°旋轉到10°,實現最小磁阻。當A-A’極勵磁時,轉子a-a’向定子A-A’軸線重合的位置轉動,這時A相勵磁繞組的電感量L最大。若以圖5定轉子的相對位置作為起始態,依次給D→A→B→C相繞組通電,轉子即會逆著勵磁順序以逆時針方向連續轉動;相反,若依次給B→A→D→C相通電,則電動機即會沿順時針方向轉動。故依次對AA’、BB’、CC’、DD’按順序變換繞組正負極通電,即可控制形成一固定轉向的旋轉磁場。完整的相位變換,使采用簡單的開關變換電路便可實現轉向的變換。其順序是:A-A'相繞組通電→a-a'與A-A'重合;B-B'相繞組通電→b-b'與B-B'重合;C-C'相繞組通電→c-c'與C-C'重合;D-D'相繞組通電→a-a'與D-D'重合;電機轉子便會逆勵磁順序方向連續旋轉。
顯而易見,當向A、B、C、D各相繞組依次通電流時,電機轉子會逐步沿著逆勵磁順序方向連續旋轉。若改變各相繞組通電的順序,電機將改變旋轉方向。但是,繞組相電流通電的方向,并不會影響轉子旋轉的方向。亦即開關磁阻電機的轉向與相繞組電流方向無直接關聯,而僅取決于各相繞組通電的順序。
實際應用中,勵磁供電回路的每個開關晶體管皆并聯一個二極管用來續流。由圖5可看出,當主開關器件S1、S2導通時,A相繞組從直流電源U吸收電能,而當S1、S2斷開時,繞組電流經續流二極管D1、D2繼續流通,并回饋電能給電源U。圖6為三相SRM的供電回路。圖6中配置的電容器用以抑制電源電壓的波動和由此所引起的電機電磁噪聲。
開關磁阻電機使電機無需受三相交流電概念的局限,而采用多相的旋轉磁場。當然,簡單的開關電路基于復雜精準的控制系統,多相位的變換也需要精準的轉子位置信息才能實現。開關磁阻電機回避了三相交流電機極對數越少轉速越高、極對數越多旋轉轉矩越大的特性,實現了轉矩與轉速同步,能在較寬范圍內按需求提供轉速,不受制于負載。
開關磁阻電機傳動的一大特色是具有再生作用。如圖7所示,在轉矩T的發電機工作段,電機反過來向系統饋送能量,呈發電機狀態。
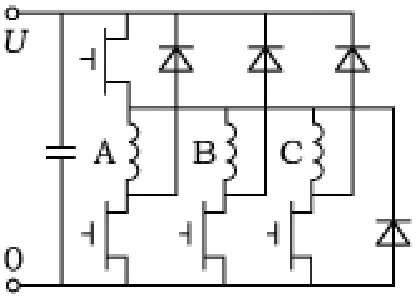
圖6 6/4極三相SRM的供電回路
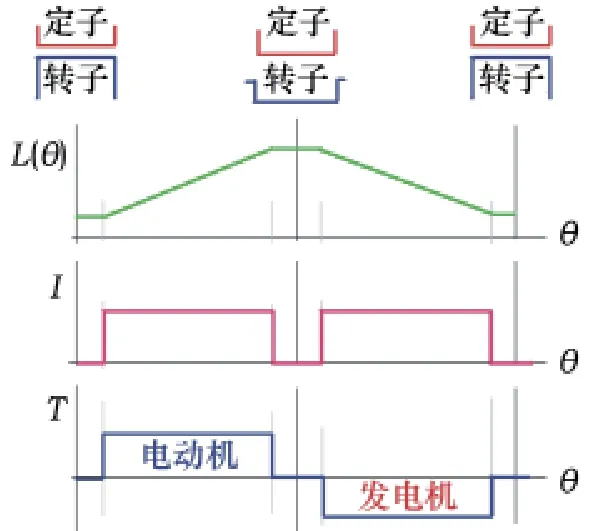
圖7 定轉子不同相對位置的電感電流和轉矩
轉矩和勵磁繞組的電感對轉子位置角θ的變化率呈正比關系。只有當繞組電感隨轉子位置角增大時,給繞組通電才能產生正向電動轉矩;而當電感隨轉子位置角變化下降時,若繞組中仍有電流,則將產生制動轉矩。必須注意:相繞組關斷后,因電感的延遲作用電流不能突變為0,為防止繞組電流延續到負轉矩區(制動轉矩),必須在繞組電感開始下降前,提前關斷繞組。
2.3 開關磁阻電機調速系統的組成
開關磁阻電機的調速控制原理是通過控制加至SRM繞組端的電流脈沖的幅度、寬度以及其與轉子相對位置的導通角、關斷角來實現的,從而控制開關磁阻電機轉矩大小與方向,成為一種新型的無級調速驅動系統,廣為應用。
正是因為開關磁阻電機是一類機電一體化的產品,實際現場使用,電機無法直接連接在一個簡單的交流或直流電源來驅動負載工作,必須和驅動控制部分不可分割地聯系在一起,形成一個系統。開關磁阻電機調速系統(Switched Reluctance Drive System,簡稱SRD)由開關磁阻電機、功率變換器、控制器和位置檢測器等幾部分組成,也有把功率變換器和控制電路合稱為控制器的,而轉子位置檢測器一般總是裝置在電機的非輸出軸一側。圖8為SRM及其簡化的控制系統。圖9為可供調速控制的SRD系統。
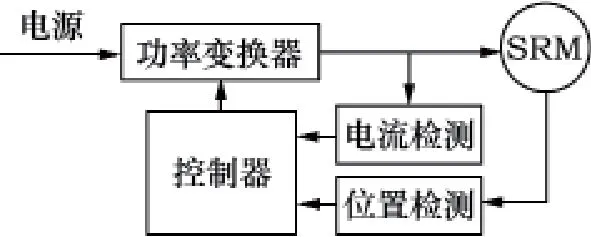
圖8 簡化的SRD系統圖
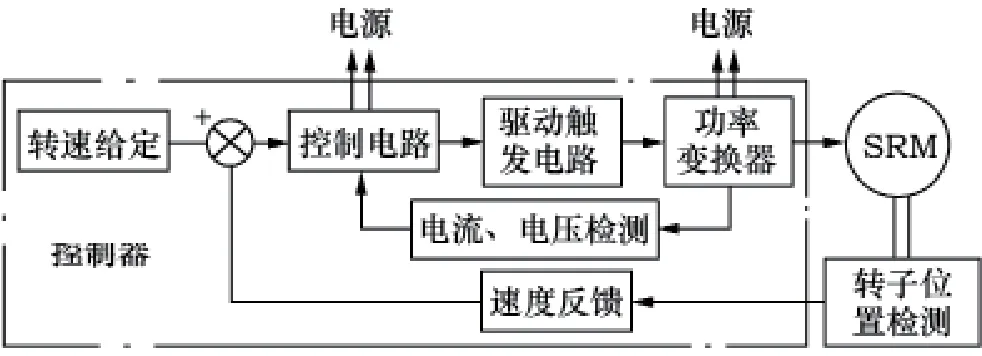
圖9 可供調速控制的SRD系統
2.4 采用位置傳感器提供轉子位置信息
開關磁阻電機簡單的開關電路是基于復雜的控制系統,而多相位變換是需要轉子位置信息才能完成。用以識別和確定各相繞組與磁極(中心線)相對位置,以決定如何實現各相勵磁繞組精準的通電,須運用快速反應的位置傳感器。目前,開關磁阻電機中也有利用霍爾傳感元件作為位置傳感器的。霍爾傳感器體積極小,可靠性好,且靈敏度、分辨率極高,其放置的位置取決于控制時勵磁順序的需要、傳感器輸出電信號之間的相序,以保證產生所要求的旋轉磁場。設計控制器時,據此安排并遵循其勵磁順序。
實際應用時發現,在高負載和高加速或減速時,由于繞組自感互感和滯后作用,雖然霍爾傳感器信號會在反電動勢電壓極性由正變為負或負變為正的瞬間改變狀態,但依靠某一點磁場強度作為監測依據的方法會發生轉子位置檢測的錯位、遺漏,影響可靠性。圖10為光電傳感器、電渦流傳感器檢測轉子位置的SRD示意圖。
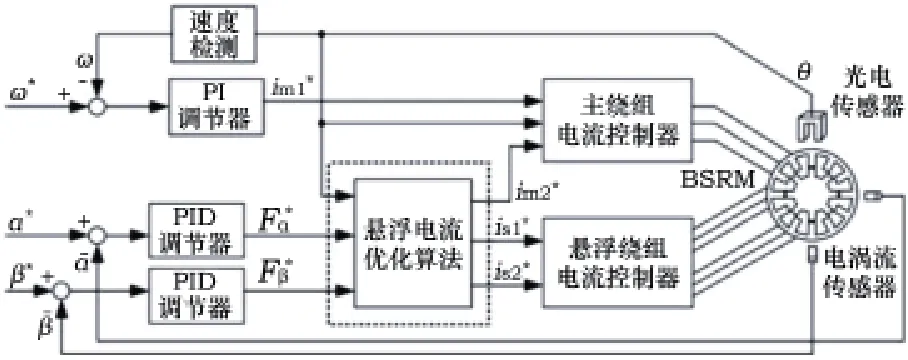
圖10 光電傳感器、電渦流傳感器檢測轉子位置的SRD示意圖
2.5 無傳感器控制的SRD
較理想的情況是不設位置傳感器,而能達到相同的效果。表1列出了5種類型的有效解決方案。
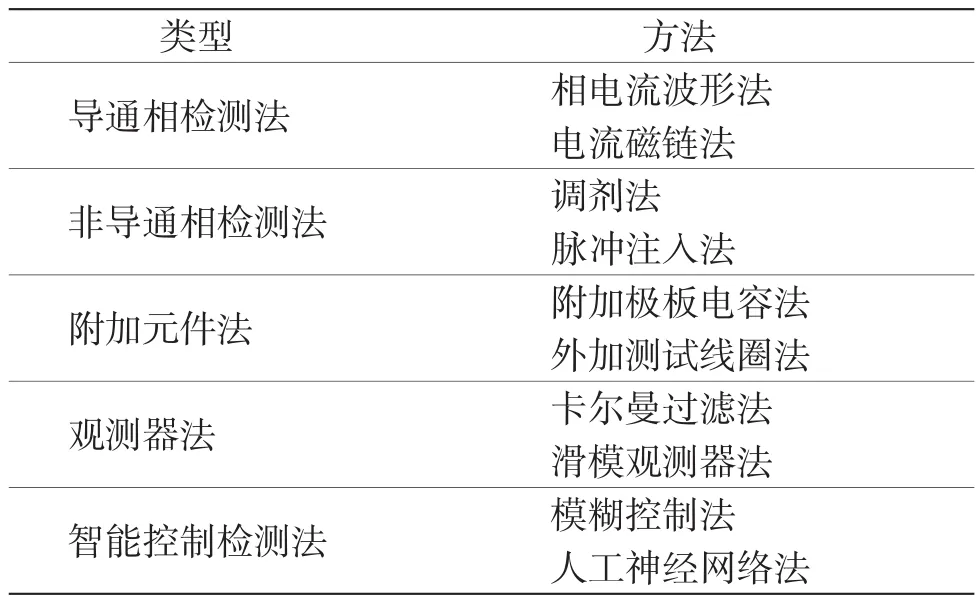
表1 5種無位置傳感器控制技術的方案
電機轉動時,每個繞組都會產生稱為反電動勢E的電壓。依楞次定律,其大小正比于轉子角速度ω、轉子極面的磁感應強度B、轉子的長度l、直徑r和定子繞組每相的匝數N,其方向與提供給繞組的電壓相反。可表達為:反電動勢E ∝ - Nl rBω。
3 SRM電機的特性
3.1 轉矩-轉速特性
開關磁阻電機的最大轉矩TP和額定轉矩TR,分別表征電機的峰值轉矩和以均方根值表達的平均連續轉矩。圖11為開關磁阻電機的轉矩-轉速特性,用ω表示電機旋轉的角速度。
定子勵磁繞組依次輪流通電一次,轉子轉過一對齒槽,定子每輪流通電Nr次,轉子才轉過1周。開關磁阻電機的轉速n(r/min)與相繞組電壓的開關頻率fph之間的關系為
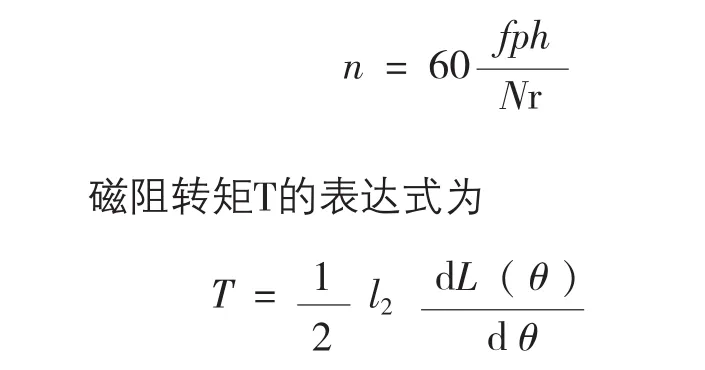
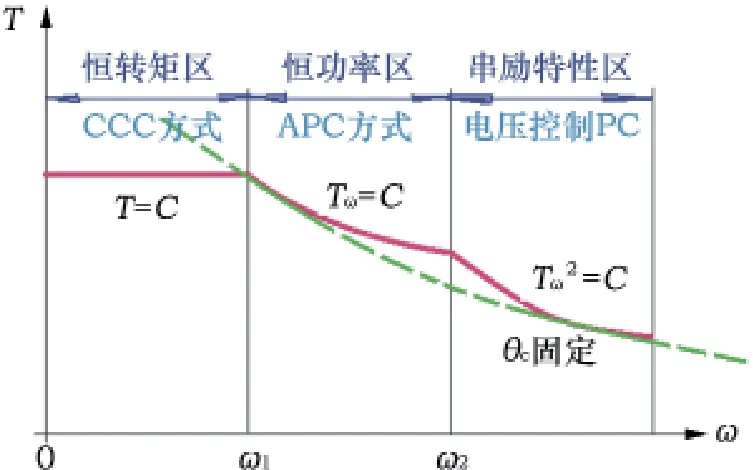
圖11 SRM轉矩轉速特性
圖11中綠色的虛線顯示出SRM有一段類似于直流串勵電動機的機械特性。
實際上,SRM運行在電流較小的情況,磁路并不飽和,電磁轉矩與電流平方成正比;而當運行在磁路飽和的情況,電磁轉矩正比于電流的一次方。這也是我們制訂SRM控制策略的依據。
SRM基本的控制策略是:低速時的電流斬波控制(CCC,Current chopping control);高速時的角度位置控制(APC,Angular position control);電壓控制(PC, Voltage control)。
開關磁阻電機有顯著的非線性及變結構、變參數的特點。SRM在不同的速度范圍必采用不同的運行控制方式。
1)低速時的電流斬波控制 圖12繪出了開關磁阻電機在電流斬波控制方式下相電流波形。開通角θon是轉矩控制的重要參數:當角速度ω確定時,若θon較小,相電流直線上升時間較長,即會增大電流,提升轉矩。而θon一定時,增大關斷角θoff,平均轉矩也相應增大。但導通角θc= θon— θoff,會有一個最佳值。超過此值,θc增大,平均轉矩反而減小。
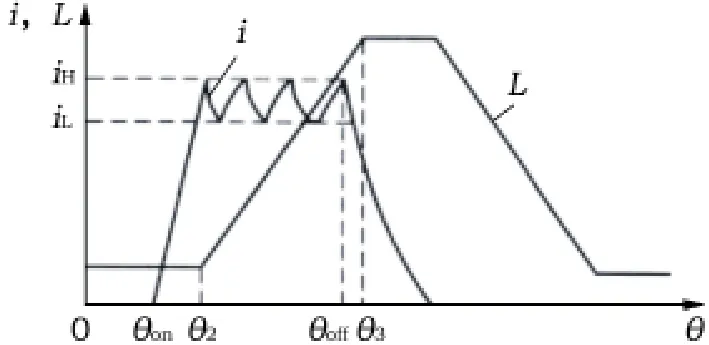
圖12 SRM電流斬波控制方式下相電流波形
2)高速時的角度位置控制 選取一定電流限值下輸出轉矩最高的優化目標,從非線性模型出發,可算出關斷角 θoff的最佳控制范圍為20 o~40o。進一步簡化,把 θoff控制在最大范圍來調節 θon,以滿足調速的要求。已有文獻資料介紹在APC方式下,以輸出轉矩最大為優化目標的關斷角 θoff的最佳控制算法。
3)電壓控制 常規的電壓PWM控制策略,對應某一較寬的速度域內,起始開通角 θon相對不可調,可通過調節電流脈沖的占空比和幅度調節轉矩,系統達到穩態后不斷微調 θon,使系統損耗相對最小。
基于現代控制理論和智能控制技術的提升,建立起SRD的動態模型和系統設計模型。本質屬于非線性控制的人工神經網絡和模糊控制技術,有強大的自學習、自適應能力,十分適應于SRD控制技術。模糊控制無需先構建受控對象精確的數學模型,而可根據人工控制規則組織控制決策表。實際使用時,為避免數據有跳躍和改善平滑性,采用與PID控制器相結合。PID(比例-積分-微分控制器)其基礎是比例控制,積分控制可消除穩態誤差,但可能增加超調;微分控制可加快大慣性系統響應速度以及減弱超調趨勢。SRM調速系統框圖如圖13所示。
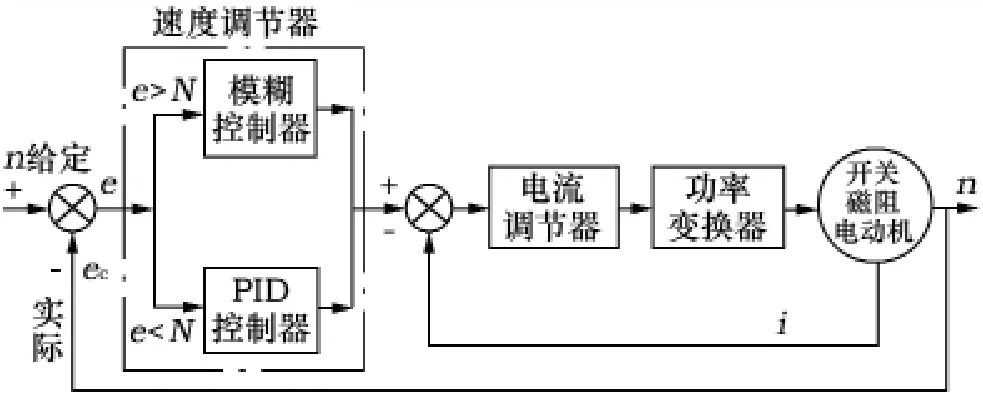
圖13 SRM 調速系統框圖
單片機(MCU,微控制器)和DSP(Digital Signal Process,數字信號處理器)芯片組成的控制器,各大生產汽車電子器件的跨國公司,如英飛凌 (Infineon)、亞德諾(Analog Devices, Inc.簡稱ADI)、德州儀器(TI)、意法半導體(ST Microelectronics)等皆有成熟的產品供應。
3.2 四象限可逆調速特性
SRM的四象限可逆調速,顯示了SRM完全對稱的特性,如圖14所示,這正是圖7中轉矩曲線在4個象限的反映。
這樣的特性特別適合車輛牽引、絞車、提升機一類的器械負載。重載啟動能力強,極快的轉速調節,不會發生轉速共振點。
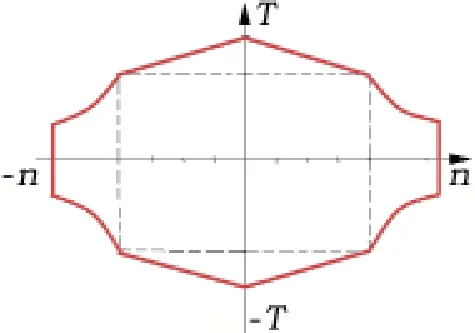
圖14 SRM的四象限可逆調速特性
3.3 試圖改變控制特性的嘗試
也曾出現過用于電動車輛的外轉子輪轂式開關磁阻電機。整個電動機安裝在車輛的輪轂上,轉子直接裝在輪圈上旋轉,定子是4對極的勵磁繞組,外轉子有6個磁極。如圖15所示。但將電動機直接裝入車輪中樞的輪轂電機安裝方式,由于電動機自身質量較大,會較大幅度增加懸架下的簧下質量,從而影響車輛的操控性能。
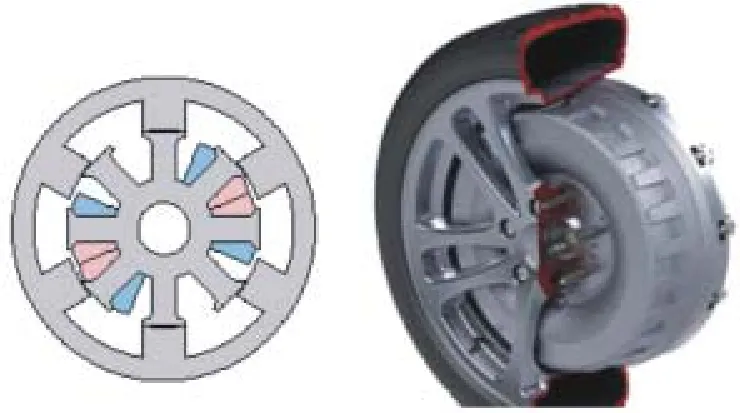
圖15 外轉子輪轂電機的橫截面及車輪剖視
4 開關磁阻電機及系統的應用
4.1 與傳統電機對比
常見的幾種變速傳動系統主要技術和經濟指標的數據對比見表2。表3將幾種常見的電動汽車主驅電機及驅動控制系統性能做了比較。
在國際電機界,中國開關磁阻電機無論在設計和工藝創新等諸方面早已迎頭趕上,皆不落后。計算機技術的發展和電磁場數值計算、仿真技術和優化設計不斷提升,形成了電磁場數值計算、等效磁路解析、場路結合求解整套的分析研究方法和計算機輔助設計軟件。
4.2 應用前景
各國開關磁阻電機應用于電動汽車的實例較突出的有:①英國捷豹公司C-X75插電增程式四驅電動超跑概念車,采用2臺SRM;②東風公司混合動力城市客車,額定功率60 kW,額定電壓336 V,輸出轉矩355 Nm(轉速800 r/min),已投入武漢市510公交線路運營;③艾默生混合動力客車采用SRM磁阻電機,A款額定功率35 kW,B款額定功率130 kW,峰值功率160 kW;④中紡銳力公司混合動力公交車采用SRM磁阻電機,額定功率35 kW,峰值功率60 kW,額定電壓336 V,額定轉速2000 r/min,最大轉速7000 r/min,系統效率94%。
正是當今功率電子技術、數字信號處理技術和智能化控制技術的快速發展,推動了開關磁阻調速電動機作為最新一代無級調速系統深入研究開發發展,并不斷完善提高。SRD優良的調速性能與極高的性能價格比,使其推廣普及產生極佳的經濟效益和社會效益。

表2 3種常見的變速傳動系統技術和經濟指標比較
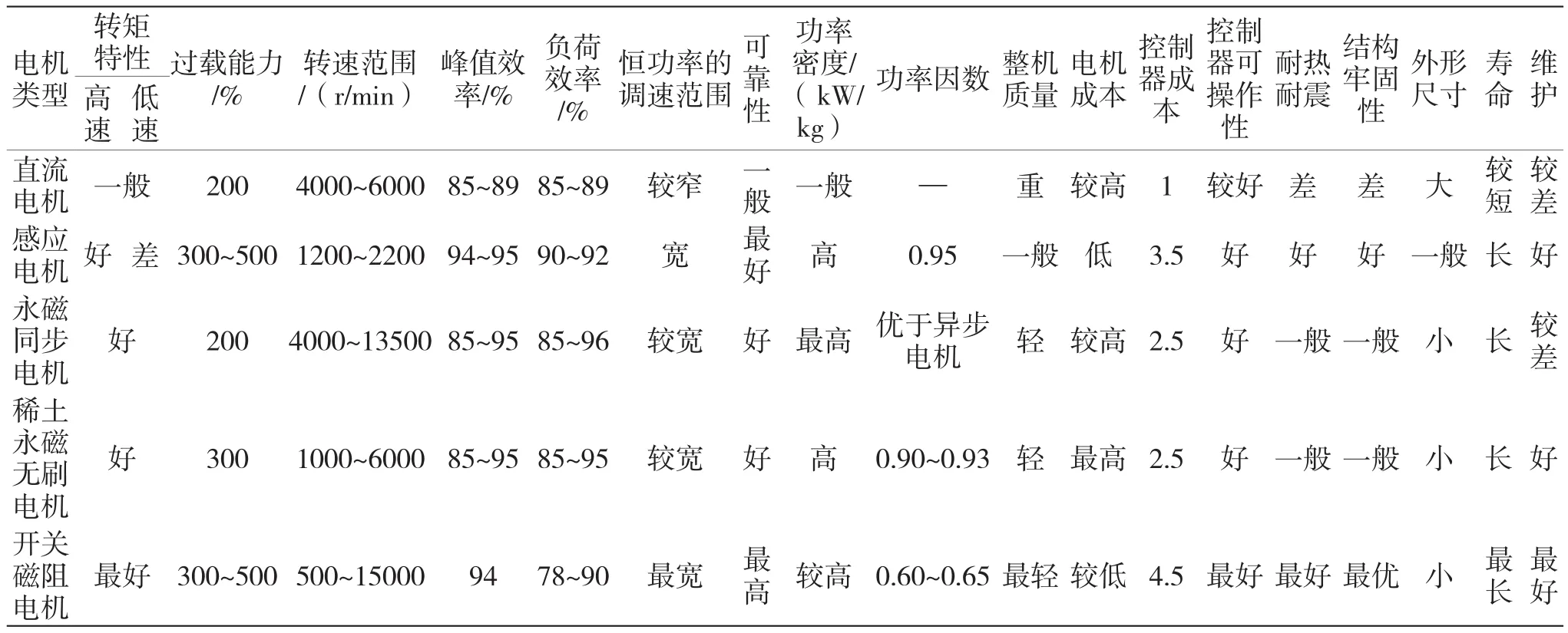
表3 電動汽車主驅電機及驅動控制系統性能比較
當前對SRD的深入研究在如下幾方面:電動機優化設計,功率轉換器、控制器、無位置傳感器控制高效簡化與智能化,無軸承SRM(磁懸浮)、損耗與溫升、故障診斷和容錯運行等的研究。
以強大的數據處理能力和高運行速度為特色的DSP (Digital signal processor)芯片的出現,為SRD推向電動汽車的應用作出巨大的貢獻。DSP芯片這種獨特架構的微處理器,也直譯作數字信號處理器,運行速度可達每秒千萬條復雜的指令程序。程序與數據分開,可同時訪問指令和數據;片內有快速的RAM,能通過獨立的數據總線在多單元中同時訪問、操作;實時快速實現各種數字信號處理算法。智能技術不斷成熟,高效高性能低價的DSP開發各種復雜算法的間接位置檢測技術,無需再附加外部的硬件電路,還極大地提高了SRM的檢測可靠性和適用性,更大限度顯示出SRD在電動汽車中應用的優勢。
5 結語
開關磁阻電機及其應用控制,除需諳熟電機的電磁場原理,還與電子科技、微電子技術、數字技術、自動控制技術以及材料科學等發展緊密聯系,要求技術人員熟悉交流直流、電動發電能量轉換、數字與模擬以及信號傳感器等領域。
[1] Tom Denton.Automobile ElectronicalandElectronicSystems[M].Elsevier Butterworth Heinemann Co.Ltd., 2009.
[2] Ronald K.Jurgen.Automotive Electronic Handbook(3th Edition)[M].McGraw–Hill Corpanics Inc,2008
[3] 李涵武.電動汽車技術技術[M].北京:化學工業出版社,2014.
[4] GB/T 18488.1—2006,電動汽車用電動機及其控制器第1部分:技術條件[S].
[5] GB/T 19596,電動汽車術語[S].
[6] GB/T 18488.2—2015,電動汽車用驅動電機系統 第2部分:試驗方法[S].
[7] 陳天殷.汽車電子技術的現狀與展望[J].汽車電器,2012(12):1-3.
(編輯 楊 景)
Application & Maintenance of Switched Reluctance Motor in Electronic Vehicles
ZHANG Hu1, Chen Tian-yin2
(1.Foton Motor Co., Ltd., Changsha 410100, China;2. Apeks Motors (Hangzhou) Co., Ltd., Hangzhou 310013, China)
This paper introduces the structure, working principle, main merits, application and future development on designing of the switched reluctance motor.
switched reluctance motor; working voltage; working temperature range; working life; reliability
U463.23
B
1003-8639(2017)05-0014-06
2016-12-12;
2017-01-17
張虎(1981-),男,湖南湘潭人,北汽福田歐輝環境裝備事業部/技術中心液壓電控部電控科/電控設計主任工程師,研究方向環衛車電控系統及新能源汽車底盤電控系統;陳天殷,男,教授級高級工程師,美國亞派克機電(杭州)有限公司總工程師,研究方向為汽車電機電器及電子,曾在學術會議及多家技術刊物發表過多篇專業文章。
