無人機海洋觀測系統集成技術研究
2017-06-19 19:18:59王軍鋒魏育成徐成華
艦船科學技術 2017年5期
關鍵詞:系統
王軍鋒,鄧 豪,魏育成,2,徐成華,2
(1. 中科九度(北京)空間信息技術有限責任公司,北京 100190;2. 中國科學院電子學研究所,北京 100190)
無人機海洋觀測系統集成技術研究
王軍鋒1,鄧 豪1,魏育成1,2,徐成華1,2
(1. 中科九度(北京)空間信息技術有限責任公司,北京 100190;2. 中國科學院電子學研究所,北京 100190)
本文主要針對特定區域海洋觀測的需求,以海洋環境和海上目標機動快速監測為目標,研制基于船載無人直升機平臺的多傳感器海洋觀測系統。重點研究海洋觀測的系統集成技術,包括無人機與機載載荷的集成、數據處理系統的集成。開展船載無人機起降和多傳感器協同海洋觀測的系統集成驗證試驗,最終建立船載無人機海、陸、氣一體化的海洋觀測系統。為構建面向海洋實際業務應用系統奠定基礎。
無人機;海洋觀測;系統集成
0 引 言
海洋技術開發在傳統海洋資源開發的基礎上,不斷向深遠海新資源和能源開發轉移。近年來,我國海洋事業進入快速發展時期,逐步完成“數字海洋”空間數據基礎設施的構建,并用于海洋權益維護、海洋資源開發利用、海洋生態環境保護等方面。因此對海洋進行更加全面、系統地觀測日益重要[1–4]。
艦載無人機以成本低、體積小、作戰使用靈活、費效比高、可避免人員傷亡等優勢,目前得到世界各國海軍的廣泛認可。尤其以艦載無人直升機,具備運動艦面自主起降能力,適合中大型水面艦艇搭載,能夠執行戰場偵察、目標指示、通信中繼、電子對抗等多種任務;隨著美國的 RQ-8A “火力偵察兵”無人機、奧地利的 S-100 無人機、瑞典的 APID-60 無人機在艦載海洋上的成功應用,艦載無人直升機展示了其用于海戰的廣闊前景。可以預見,無人機將成為未來艦載武器系統中不可替代的重要組成部分。
目前,海洋環境觀測手段大多采用多種傳感器、儀器及多種觀測平臺,對海域進行全時空、高密度、高頻率的立體觀測。對研究海域進行長期的、實時的、動態的、交互式的觀測[5–6]。近年來,隨著國內無人機技術的快速發展,無人機遙感監測已在民用技術領域得到廣泛的應用并取得了良好的應用效果。在海洋環境監測方面,無人機作為一種新的遙感監測平臺,成為空間數據獲取的重要手段,與衛星航天遙感、有人機航空遙感、海面船舶調查形成有機補充,形成對海洋環境的全方位、立體化監測。同時隨著無人機技術的不斷成熟,能夠搭載多種不同的海洋環境探測任務載荷,對各類海洋動力環境要素、海洋環境現象和海上目標進行探測。船載無人直升機探測技術以其高機動性、快速反應、高分辨率、低成本的應用特點在海洋觀測系統中占有重要的地位[7–8]。為了更好地開發利用海洋資源,維護海洋權益,盡快發展和完善我國無人機海洋觀測系統的集成應用技術研究目前已成為一個重要的研究課題。
1 無人機海洋觀測系統組成
無人機海洋觀測系統主要由 3 部分組成,分別是無人機飛行平臺、海洋觀測載荷和多源觀測數據處理系統。其中海洋觀測載荷主要包括了微型 SAR、激光雷達、溫濕度傳感器等,為進行全方位的海洋觀測提供了良好的觀測手段。無人機系統作為飛行平臺為載荷觀測提供空中觀測平臺,在獲取觀測數據后,對不同觀測數據進行處理與融合分析,從而形成一套完整的海洋觀測系統。
1.1 無人機飛行平臺
無人機海洋觀測系統飛行平臺選取 Z-5 型無人直升機,Z-5 型無人直升機結構組成如圖 1 所示。
無人機海洋觀測系統主要由直升機平臺分系統、船載監控站分系統和船載保障分系統 3 部分組成。無人直升機平臺分系統主要提供飛行和裝載的功能,由機體結構、動力及傳動系統、旋翼及尾槳系統、電氣及控制系統等組成;船載監控站分系統由飛行控制與導航設備、數據鏈測控設備等組成,主要完成任務的規劃、飛行狀態的監測與控制等功能;船載保障分系統主要由船載供電設備、燃油加注設備等組成,主要用于維護、燃油加注、系留、飛行前的準備和測試[9]。Z-5 無人直升機主要技術指標如表 1 所示。
在 Z-5 型無人直升機系統的基礎上,根據海洋觀測船載使用環境的要求,進行無人機系統的船載適應性改造,包括結構的適應性改造、飛行控制系統的船載自主起降功能設計、測控系統的小型化設計以及船載保障系統的設計等,完成船載自主起降的功能測試,開展載荷集成工作,并配合載荷開展飛行試驗。
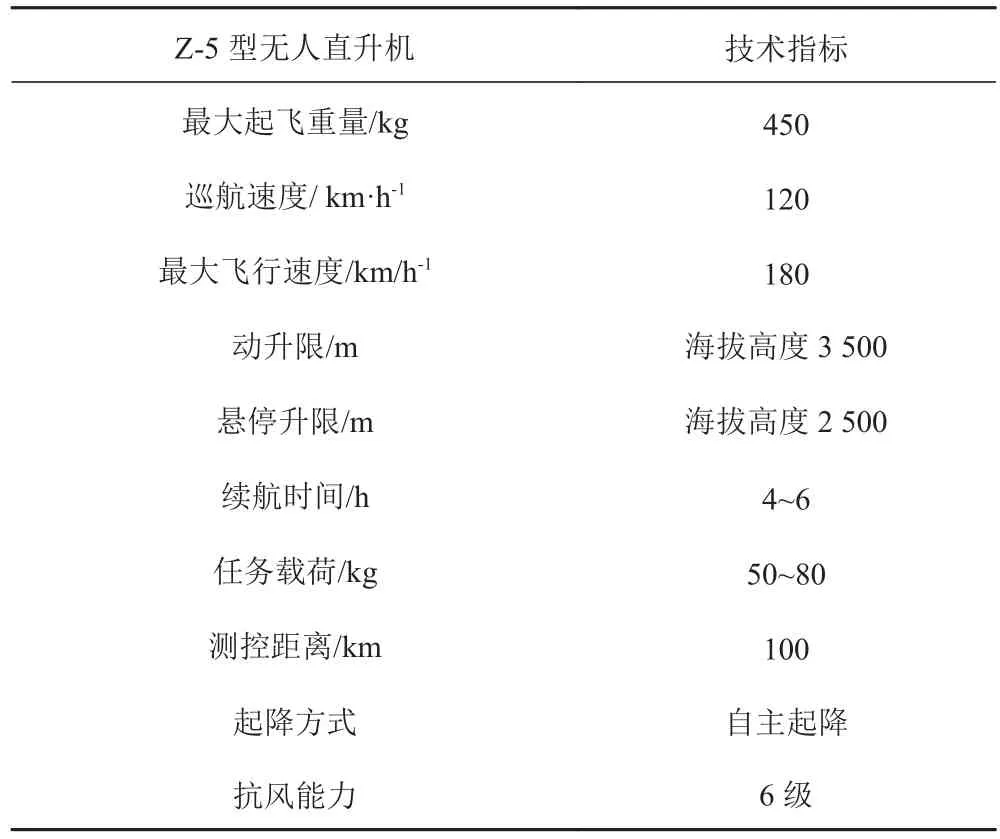
表1 Z-5 型無人直升機主要技術指標Tab. 1 Z-5 UAV main specifications
無人直升機海洋觀測系統的系統組成如圖 2 所示。
1.2 海洋觀測載荷
海洋觀測環境復雜多變,不同的應用方向需要不同的載荷。海洋移動目標和海島監測需要全天時、全天候的 SAR 載荷和光學攝像機;海洋動力環境觀測需要 SAR 載荷和激光測風雷達;海氣邊界層觀測需要激光測風雷達和溫濕度檢測儀,進而建立多傳感器、多角度、全方位的海、陸、氣一體化海洋監測系統[10]。
本系統根據應用需求,主要選取研制3款類型載荷:微小型全極化 SAR 載荷、相干多普勒激光測風雷達和溫濕度檢測儀,同時利用成熟的光學攝像機,開展多載荷協同作業,適應海洋觀測應用。
1)無人機機載微小型全極化 SAR 載荷
針對海洋觀測應用需求,SAR 載荷能夠實現全極化 SAR 數據獲取、SAR 數據實時成像處理。從而獲得全天時、全天候海洋觀測能力,滿足海洋目標特性分析、目標識別、海島地物分類等觀測需求[11]。
2)無人機機載相干多普勒激光雷達
相干多普勒激光雷達是一種新型的遙感探測設備,探測數值精度高,能實現地面至低空 3 000 m 大氣風場的無盲區探測,具有很高的時間分辨率(秒級)、空間分辨率(30~50 m)和精確度(0.5 m/s),并進行不間斷連續探測。相干多普勒測風激光雷達可以快速、準確測量晴空大氣三維風場,實時提供高精度、高分辨率的大氣風場信息。同時,還具備云底高度、海氣邊界層高度、能見度及氣溶膠等大氣參數的綜合探測能力。
3)無人機機載溫濕度檢測儀
無人機機載溫濕度傳感器在系統結構上主要分為信號調理模塊和數據處理與通信模塊兩部分。信號調理模塊負責信號的采集、放大、數字化、調整與補償;數據處理與通信模塊負責溫濕度傳感器入云及出云自動監測、數據的自容存儲、無線傳輸和雙傳感器之間的通信[12]。
1.3 觀測數據處理系統
觀測數據處理系統依據船載無人機多傳感器對海觀測特點和多源數據組織融合需求,設計開發的具備多源數據融合處理、集成管理和可視化展示能力的綜合處理系統。本系統利用搭載的不同傳感器具有的特性,進行船載無人機海洋觀測系統中的測量方法和反演模型的研究,并對海面的風場、波浪場、溫濕度廓線、地物特性、船只目標等要素進行機動快速觀測,最終實現海-陸-氣一體的多傳感器協同觀測與數據融合集成[13]。
系統主要由以下 4 部分組成:
1)載荷驅動完成對無人機上搭載的傳感器(SAR、激光雷達、溫濕度)的工作狀態的監視、數據讀取、狀態讀取以及對傳感器命令控制和通信初始化。
2)數據管理是進行數據預處理和轉換格式,并提供標準的數據處理接口。將標準化的海量數據進行保存,構建穩定易擴展的數據存儲模塊。
3)載荷數據引擎是監控傳感器的運行狀態,并將觀測數據以可視化的形式進行實時顯示。
4)觀測數據融合與可視化通過虛擬現實、視景仿真技術和三維可視化技術對海洋數據中的非可見要素進行表達,構建高逼真的虛擬海洋環境場景,并利用三維圖形學和科學可視化技術,對海洋中的非可見的海洋參數信息進行多維度、多方式的動態可視化。
2 無人機海洋觀測系統集成
2.1 無人直升機任務載荷集成
無人直升機與任務載荷的集成主要包括電氣集成和結構集成2種。電氣集成主要由地面鏈路設備和機載鏈路設備組成,結構集成主要關注無人機在搭載載荷后的系統重心配平。
2.1.1 電氣集成
圖3 為無人機飛行平臺與任務載荷設備的電氣系統接口設計,分為機載鏈路和地面鏈路設備 2 個部分,通過系統標準化接口為無人機飛行平臺和任務載荷之間的飛行控制、航線設計、載荷觀測及數據傳輸的工作過程及工作原理圖。
1)地面鏈路設備
無人機正常飛行時,飛行控制指令和任務操控指令經鏈路控制模塊復合編碼后,利用遙控發射電臺進行傳輸。遙測及任務送給遙測軟件、任務處理設備和圖像顯示設備。結合遙控的通信可靠性,采用 2 個頻點同時發射。地面天線選用全向玻璃鋼或吸盤天線,離開一定距離放置在無遮擋平面上,要求間隔1個波長以上。
2)機載鏈路設備
機載鏈路設備與機上飛行控制計算機、任務載荷通過鏈路控制模塊進行數據交互。機載天線選用全向天線,并通過整機實際空中懸停測試,對機載天線布局進行安裝布局。
2.1.2 結構集成
結合 Z-5 型無人直升機搭載任務轉載在不同飛行總重下的重心范圍要求。從圖 4 可看出,起飛重量為450 kg 時直升機的重心范圍要求最為狹窄。為滿足大多數工況下的使用,對 Z-5 型無人直升機的航電設備,飛控設備及任務載荷設備進行了安裝位置的優化,以滿足無人機飛行平臺對飛行重心范圍的要求[14–15]。
優化后的任務設備安裝位置以及整機重心測試完成后,結構安裝及系統集成如圖 5 所示。
2.2 數據處理系統集成
2.2.1 數據處理系統硬件集成
海洋觀測數據處理系統的硬件組成包括:網絡交 換機、數據集成工作站和數據觀測顯示器,系統集成工作站通過交換機和串口鏈路與無人機地面站總控機進行通信交互。系統硬件結構如圖 6 所示。
2.2.2 數據處理系統架構
數據處理系統采用面向服務的多層架構模式,分為載荷驅動層、邏輯處理層、界面交互層以及數據層[16]。數據處理系統軟件架構圖如圖 7 所示。
1)載荷驅動層:以動態鏈接庫(DLL)的方式集成各個載荷的控制、狀態獲取以及觀測數據獲取等功能,向功能邏輯層提供載荷功能方法。
2)邏輯處理層:該層處于數據訪問層與表示層中間,通過訪問載荷驅動層和數據訪問層獲取數據,為UI 層提供功能數據。
3)界面交互層:采用 MVC 設計模式,將功能邏輯與 UI 展示分離,以動態視圖的方式,為用戶提供擴展性高的界面交互。
4)系統數據存儲:根據系統數據的特點,數據庫設計為文件系統與關系數據庫系統協同存儲的模式。文件系統用來存儲影像、圖片等觀測數據,關系數據庫存儲系統的索引結構和標量觀測數據。
3 無人機海洋觀測系統集成試驗驗證
為確保無人機海洋觀測系統的實用性,將載荷與無人直升機飛行平臺集成完成后進行飛行試驗[17],檢驗多傳感器的協同觀測能力,通過多傳感器海洋協同觀測數據對數據融合性能進行驗證。系統集成試驗驗證分為 3 個部分,分別是海島陸基觀測試驗、駁船起降飛行試驗和海上船載飛行試驗,分階段逐步完成對系統的集成性能進行試驗驗證。
3.1 海島陸基觀測試驗
通過選定適合起降條件的區域進行陸基對島觀測試驗,利用不同載荷進行多傳感器協同對島觀測,重點觀測海島地物,海島附近的海洋動力環境,以及海氣邊界層風場及溫濕廓線,從而獲取海島區域的海、陸、氣一體化觀測數據。測試無人直升機在負載情況下,復雜海上環境的飛行性能;通過機載載荷的海洋觀測數據矯正載荷參數指標,驗證數據處理系統的性能。具體試驗流程圖 8 所示。
3.2 船載起降飛行試驗
海上船載起降試驗是在海上測試驗證無人機船載起降飛行性能,進一步驗證船載無人直升機海洋觀測 系統的整體集成能力,評估海洋觀測系統系統在真實海上環境的表現,為海上應用提供技術保障。
試驗選擇駁船作為無人直升機系統的起降平臺,船只后甲板區域可為無人直升機提供起降空間。主要為無人直升機測控系統與駁船的集成,以及無人直升機起降平臺與駁船的系統集成。具體試驗流程如圖 9 所示。
3.3 海上船載飛行試驗
海上船載飛行試驗是在真實海況條件下,測試船載無人機定點起降性能;評估船載無人直升機海洋觀測系統的整體性能,完成海島(礁)海-陸-氣一體化觀測應用。在真實海況條件下進行完整的船上起飛、海面巡航、傳感器實時觀測與傳輸,船上定點降落和獲取數據后期處理與應用。海上船載飛行試驗具體試驗流程如圖 10 所示。
4 結 語
本文主要針對海洋觀測的實際應用需求,完成了基于無人機的海洋觀測的系統集成。首先針對海洋觀測的應用需求,給出海洋觀測系統的組成;其次重點介紹了無人機與機載載荷的硬件集成,數據處理系統的軟件集成;最后提出了船載無人機起降和多傳感器協同海洋觀測的系統集成驗證試驗。為建立船載無人機海、陸、氣一體化的海洋觀測系統,并構建面向海洋的實際業務應用系統奠定了基礎。
[1]羅續業, 周智海, 曹東, 等. 海洋環境立體監測系統的設計方法[J]. 海洋通報, 2006, 25, 4: 69–77.
[2]GASSLE, GLENN S M ,VONAIT C. Ocean observing systems for marine Habitats [C]// OCC' 98 Proceedings, Sea Technology, November, 1998: 567–570.
[3]賀明霞, 賀雙顏, 王云飛, 等. 中國衛星海洋觀測系統及其傳感器(1988-2025)[J]. 中國海洋大學學報(自然科學版), 2011(12) 91–103.
[4]曹洪濤, 張拯寧, 李明, 等. 無人機遙感海洋監測應用探討[J]. 海洋開發與管理, 2015(4) 51–53.
[5]NAEEM W, SUTTON R, CHUDLEY J. Modelling and control of an unmanned surface vehicle for environmental monitoring [C]// UKACC International Control Conference, August, Glasgow, Scotland, 2006.
[6]DEREK A P. Cooperative control of collective motion for ocean sampling with autonomous vehicles [D]. PhD thesis, Princeton University, 2007.
[7]劉波, 張洪濤, 管明森. 無人直升機技術的發展[J]. 艦船電子工程, 2011(3): 18–21.
[8]史光平, 劉瑀. 無人機遙感系統的海事應用[J]. 中國海事, 2011(4) 29–32.
[9]黃海. 無人直升機懸停/小速度段的飛行控制律設計技術研究[D]. 南京:南京航空航天大學, 2010.
[10]蔡志浩, 燕如意, 王英勛. 無人機遙感多載荷任務規劃方法[J]. 上海交通大學學報, 2011(2): 267–271.
[11]劉榮科, 張曉林. 無人機機載合成孔徑雷達的高速數據傳輸[J]. 遙測遙控, 2000(3): 19–23.
[12]鄢青青, 邵瓊玲, 王盛軍. 基于SHT75的無人機溫濕度測量系統研究[C]//中國電子學會信息論分會. 第二屆亞太地區信息論學術會議論文集(上冊)2011.
[13]尹航, 李少洪. 無人機載多傳感器集成與數據融合[J]. 現代防御技術, 2004, 32(2) 47–50.
[14]孔毅, 薛劍. 無人機海洋環境探測載荷配置優化[J]. 解放軍理工大學學報(自然科學版), 2012(2) 219.
[15]王軍鋒. MiniSAR與無人機系統集成應用研究[J]. 北京測繪, 2013(6) 42–45.
[16]張秋波. 海洋觀測系統集成中間件設計與實現[D]. 青島中國海洋大學, 2012.
[17]呂書強, 晏磊, 張兵, 等. 無人機遙感系統的集成與飛行試驗研究[J]. 測繪科學, 2007, 32(1): 84–87.
UAV onboard ocean observing system
WANG Jun-feng1, DENG Hao1, WEI Yu-cheng1,2, XU Cheng-hua1,2
(1. GeoDo (Beijing) Spatial Information Technology Co. Ltd., Beijing 100190, China; 2. Institute of Electronics, Chinese Academy of Sciences, Beijing 100190, China)
The prototype is based on combined types of sensors which are equipped on UAV on board. It can be used for observing specified marine area to aim at monitoring the marine environment and objects. This paper focus on the system integration technology of ocean observation, including the integration of the UAV and the airborne load, and the data processing system. The system integration verification test of the ship carrying UAV landing and multi sensor cooperative ocean observation is carried out, finally, a marine observation system of the shipborne UAV ocean, land and gas integration is established, which will lay a foundation for building the actual ocean business application system.
UAV;ocean observe;system integration
V279
A
1672–7619(2017)05–0157–06
10.3404/j.issn.1672–7619.2017.05.032
2017–01–13
國家高技術研究發展計劃資助項目(2014AA09A511)
王軍鋒(1976–),男,工程師,主要從事攝影測量與遙感、系統集成測試等工作。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32