某工作船主機異常停車故障的分析與處理
2017-06-19 19:36:31陳深,胡清,孫顯
中國修船 2017年2期
關鍵詞:故障
陳 深,胡 清,孫 顯
(安慶中船柴油機有限公司,安徽 安慶 246005)
技術交流
某工作船主機異常停車故障的分析與處理
陳 深,胡 清,孫 顯
(安慶中船柴油機有限公司,安徽 安慶 246005)
文章針對某工作船2臺主機并聯運行時出現的異常停車故障現象,進行故障原因分析,通過現場調整PID參數,并在高負荷下進行測試,經過長時間運行,無異常停車現象發生,驗證了該處理方案的有效性,最終解決了故障問題。
電子調速器;異常停車;PID參數
主機在船舶推進動力裝置[1]中扮演著至關重要的角色,是全船的心臟,因此對于主機的安全運行保障就顯得尤其必要。若船舶在運行或作業過程中出現主機突然停車的事故,對于某些特殊用途的船舶或其他相關設施可能會造成重大危害,所以在引起危害前必須盡快找出影響異常故障發生的關鍵因素并制定合理的方案,才能解決問題,避免故障再次發生,為船舶的安全運行提供可靠的環境。
1 故障現象
某深水三用工作船采用4臺柴油機、雙可調螺距螺旋槳驅動軸帶發電機的推進系統。每2臺柴油機分別通過高彈性聯軸節,將功率輸入1個齒輪箱,再經中間軸系與調距槳聯接。每臺齒輪箱還分別通過高彈性聯軸節與1臺軸帶發電機聯接,2臺主柴油機可同時也可單獨驅動軸帶發電機。該船為更方便地實現2臺左或右主機在并聯模式下運行,4臺主機均采用了電子調速器,通過2臺電調控制器(Woodward 723Plus)之間的通訊電纜和負荷分配線連接,同時利用設定軟件在控制器中進行簡單配置,其系統結構如圖1所示。
該船在執行作業或航行任務時,絕大多數情況下均采用2臺主機并聯運行模式。該船交付使用半年后,某次在海上執行航行任務時,突然出現并聯運行過程中的1#與2#2臺左主機出現異常自動停車現象,導致船舶瞬間失去動力。在首次出現上述故障現象后,一旦2臺主機在較高負荷下(60%以上額定負荷)運行幾分鐘時間,都會出現此故障,嚴重影響了該船的正常營運。
2 故障分析
對于該船主機反復出現的異常停車故障現象,技術人員從以下幾個比較可能的方面進行逐步分析。
2.1 主機安保系統動作
當出現如主機滑油壓力過低或出現真實超速等安全情況時,安保系統[2]將自動發出指令給位于柴油機上安裝的燃油停車電磁閥,該停車電磁閥得電使控制空氣進入燃油切斷裝置工作,從而驅動燃油公共連桿朝停車方向轉動,達到斷油停車的目的。在上述各種安保動作的情況下,控制系統會及時地在主機控制箱上發出聲光報警信息,提醒船員注意。在調閱了該船集控室監測報警系統監控電腦的歷史報警記錄發現,在幾次故障發生的時候,均無安保方面的報警記錄,主機控制箱上記錄報警的觸摸屏報警信息列表里也沒有相關記錄。從這一點進行判斷,停車故障可能不是由主機安保動作引起的。為了進一步驗證這個判斷的正確性,服務工程師在2臺故障主機的燃油切斷裝置的活塞桿露出部位均涂抹上黃油,如圖2所示。如果是由主機安保動作引發的停車情況,該活塞桿會向切斷裝置控制氣缸的內部方向運動,在此運動過程中必定會將該部位的黃油從活塞桿上擠出,這種明顯的變化可以作為驗證的手段,船員不必在機艙中對燃油切斷裝置時刻保持關注。船上人員操作將主機負荷逐步提高,當故障出現后,再次到機艙觀察切斷裝置的活塞桿部位,發現原先涂上的黃油保持原樣,從而排除了主機安保引發停車的可能性。
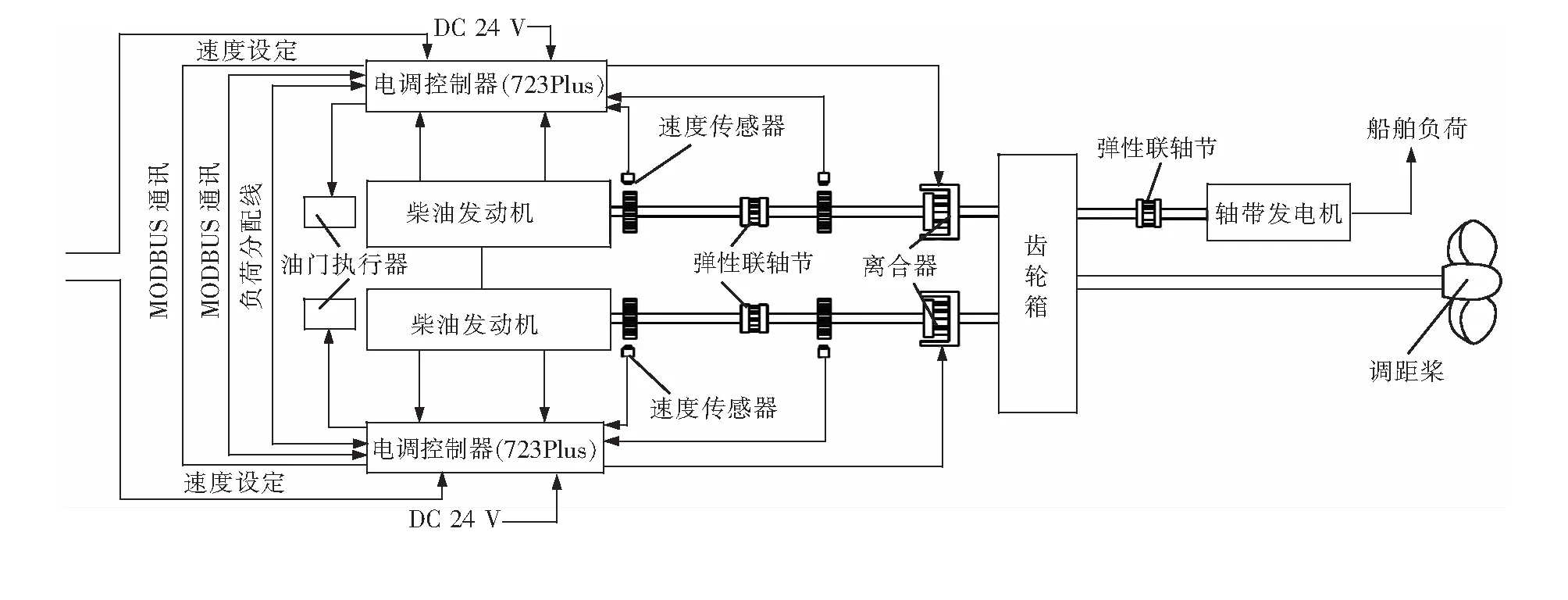
圖1 雙機并聯系統圖
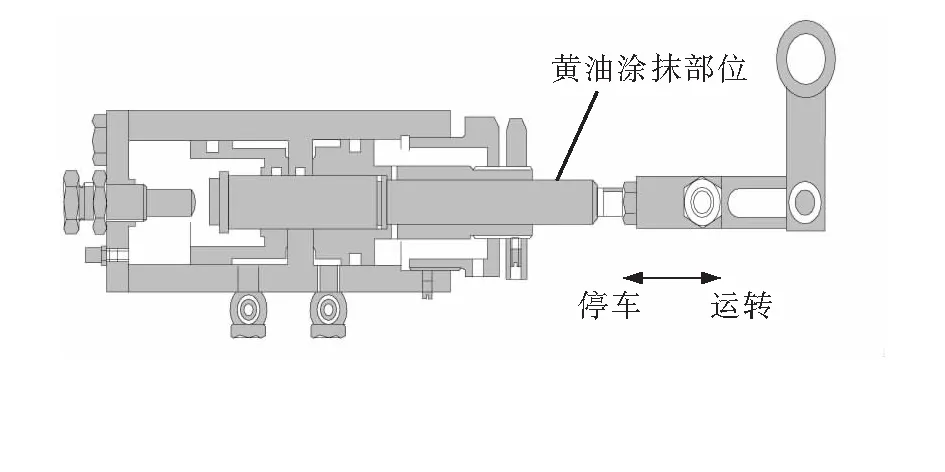
圖2 燃油切斷裝置
2.2 安保系統相關電氣元件故障
安保系統中比較重要的電子元器件,如柴油機轉速傳感器、轉速傳感器監控模塊以及PLC模塊一旦出現故障,或者在主機運行過程中受到船上其他電子設備的干擾,在屏蔽措施沒有做好的情況下,柴油機轉速傳感器可能會發出虛假的脈沖信號,這種虛假脈沖信號被安保系統PLC控制器接收并處理,會自動執行超速停車指令并導致主機停車。此種情況和第一種分析情況在停車動作的執行過程上是一樣的,同時也一定會伴隨有聲光報警提示并自動記錄。服務工程師首先檢查了船上對于柴油機轉速傳感器從機上接線箱到控制箱的電纜情況,從該電纜是否為屏蔽電纜、轉速傳感器信號是否是單獨的電纜、屏蔽電纜的屏蔽層有沒有進行接地處理等幾個方面分別檢查,該船以上幾個方面均符合相關規范以及技術要求[3]。同時,對曾經在其他船有故障案例出現的轉速傳感器監控模塊以及PLC模塊均進行了更換,更換后異常停車現象仍然會發生,說明以上電子元器件質量是完好的,對停車現象不構成影響。
2.3 主機電子調速器執行器故障
該船主機配置Woodward公司的UG8執行器,是該型號柴油機在國內首次和電子調速器配套使用,缺乏使用經驗。經與調速器廠家的技術人員進一步了解,電子調速器的執行器只是單純的執行機構,本身不具備調速功能,其主要作用就是接收723Plus控制器輸出的0~200 mA電流信號,通過控制器自身改變的電流大小來驅動內部的電機工作來加、減油門,從而實現轉速的調節。從以上說明可以看出,執行器不會出現主動拉油門的動作讓柴油機停車,它只會被動地根據控制器給出的調節指令去執行相應的動作。同時,從船員那里可以獲得一些重要信息,2臺主機如果分別在單機模式下工作,即使負荷加到80%以上長期運行,也不會出現運行中無故異常停車的現象,故而判斷主機電子調速器執行器故障的可能性是非常小的。
2.4 主機電子調速器控制器及外圍供電故障
2臺主機中任意一臺電子調速器723Plus控制器如果出現故障,會不會引發前面所述的停車故障現象呢?比如說控制器故障導致內部設定好的參數因為某種原因發生了變化,而這一點是很好判斷的,可以用隨機配置的手持式編程器查看相關設定參數,和該船交船前的系泊試驗時記錄的參數進行對比,發現所有的參數都和以前保持一致,沒有任何變化。隨后,技術人員查看了該型號控制器的操作說明書,其規定的供電范圍為DC 18~40 V。調速器廠家工程師懷疑是否并聯運行主機在較高負荷時出現控制器供電不足(一旦供電電壓跌至18 V以下,可能會出現異常故障)。根據該船主機控制系統圖紙要求,723Plus控制器電源從主機安保箱中提供,該電源來自船上UPS電源箱。通常情況下,UPS電源是不間斷供電模式,且能保持其輸出電壓的穩定性。重新啟動主機,并讓2臺主機并聯運行,駕駛室按照要求逐步地提高負荷,同時在此期間技術人員用萬用表直流電壓檔測試控制器的供電電壓,發現該電壓值維持在DC 23 V左右。一直到出現2臺主機停車故障,觀察發現萬用表顯示數值依然保持DC 23 V不變,并沒有降低或超出至該控制器供電電源要求范圍的現象。
2.5 電子調速器PID參數與發動機不匹配
對于配置電子調速器的主機,在主機廠臺架試驗以及船廠系泊試驗期間,都要根據實際試驗負荷情況的不同,對每1臺主機配套的電子調速器的參數進行調試,主要是PID參數的調整。技術人員利用Woodward調速器公司專為電子調速器設計的在線監控軟件Toolkit在筆記本上對主機的轉速變化進行監控。現場監測到的轉速曲線顯示,如圖3所示,當并聯運行主機提高到較高負荷時,一段時間(大概2~3 min)以后執行器控制信號發生抖動,最終導致停機。因為2臺主機處在并聯運行模式,轉速的波動對負荷分配有很大影響,1臺主機停機,故障主機的所有負荷將瞬間轉移到和其并聯的另1臺主機上,導致另1臺主機出現超負荷直接停機。經現場分析,結合監控曲線可以初步判斷,出現這種現象可能是比例增益過大導致執行器信號震蕩所致。該船這2臺故障主機在主機廠臺架試驗和船廠系泊試驗時PID參數都經過了多次調整,但對于在較高負荷下的工況可能還不是很合適。因為發動機狀態是會發生變化的,隨著運行時間的增加,發動機的運行特性不可避免的會發生變化。PID參數為了能夠涵蓋所有的變化是需要不斷摸索的,一般需要在臺架上進行充分的實驗。因此,技術人員分析現在出現的問題就是發動機隨著磨合穩定,特性有所變化,而前期參數沒有經過足夠多工況的驗證,當發動機特性變化導致PID參數未涵蓋其變化導致輸出波動進而在高負荷停機。針對以上情況,并根據故障發生時轉速波動曲線變化,綜合分析之后,決定采取的解決方案是將2臺電子調速器的比例增益向下調整。

圖3 轉速監控曲線(調整PID前)
3 故障處理
再次啟動主機之后,技術人員要求船上駕駛室先讓2臺主機在低負荷下運行一段時間,以便對PID參數進行調整,并在線觀察調整后的轉速曲線變化情況,調整界面如圖4所示。
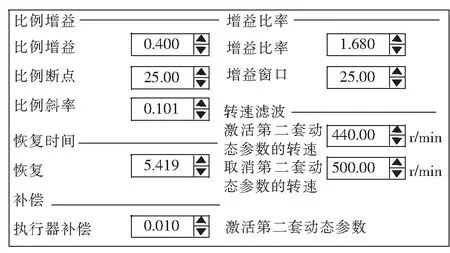
圖4 PID參數修改界面
分別對2臺故障主機的電調控制器PID參數調整如下:1#比例增益 Gain 由0.9調整至0.66;2#比例增益Gain 由1.1調整至0.89,調整之后在主機高負荷情況下監控發現轉速波動情況明顯好轉,不過依然不太理想。為了使轉速波動范圍進一步減小,技術人員繼續調整PID參數,1#比例增益 Gain 由0.66調整至0.4;2#比例增益Gain由0.89調整至0.72。經過再次調整后,2臺主機運行轉速曲線非常平穩,監控截圖如圖5所示。隨后,該船1#與2#2臺主機在并聯模式下高負荷工況運行約4 h未發生任何異常。自此次調整后,該船主機已經無故障運行近半年時間。
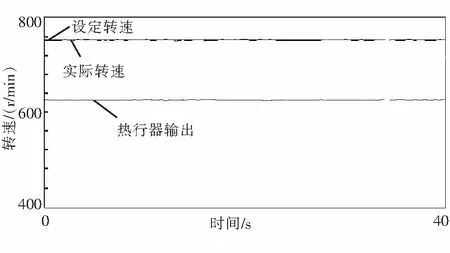
圖5 轉速監控曲線(調整PID后)
4 結束語
經過此次主機異常停車故障分析與處理過程,可以得出如下結論。
1)隨著柴油機狀態的改變,被控制對象的動態特性與之前相比發生了變化,超出了PID參數的控制范圍。因此PID參數與發動機之間出現不匹配,引起執行器控制信號抖動,從而使柴油機轉速波動過大造成轉速傳感器檢測失真,觸發停車。
2)經過多次調整,使電子調速器PID參數和發動機之間達到了良好的匹配,已能覆蓋出現故障的1#與2#2臺并聯運行主機所有的工況,在今后的使用中應能良好的工作。
船舶主機出現的故障現象多種多樣,本文對今后船舶主機出現類似故障現象的解決具有一定的借鑒與參考意義。
[1] 黃少竹. 船舶柴油機[M]. 大連:大連海事出版社,2005.
[2] 鄭鳳閣. 輪機自動化[M]. 大連:大連海事出版社,1998.
[3] 中國船級社. 中國船級社國內航行海船入級規范[M]. 北京:人民交通出版社, 2006.
In regard to the abnormal shutdown of the two main engines of certain workboat during parallel running,all the possible influencing factors are analyzed for seeking solutions to solve the problem.The specific measure is to adjust PID parameters at site and to conduct test under heavy load.After a long time of running,no abnormal shutdown is found.As a result,the effectiveness of this solution is verified.
electronic governor;abnormal shutdown;PID parameters
陳深(1980-),男,安徽安慶人,工程師,學士,主要從事柴油機電氣控制工作。
U672
10.13352/j.issn.1001-8328.2017.02.001
2016-12-02
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39