
下肢外骨骼系統穩定性分析和步態控制研究
2017-06-19 23:20:19徐元杰樊軍
中國新技術新產品 2017年11期
關鍵詞:優化
徐元杰+樊軍
摘 要:本文在傳統ZMP穩定性判據的基礎上對ZMP穩定性判據進行了改進,建立了人的外界干擾因素對系統穩定性的影響的數學模型,然后對下肢外骨骼人機系統的運動過程穩定性進行研究,按最大穩定裕量原則對步態進行優化。為了在不同情況下保持平衡,提出了步幅、調整新的控制措施。通過仿真實例驗證了所提出方法的正確可行性。
關鍵詞:下肢外骨骼;ZMP;穩定性;優化
中圖分類號:TH12 文獻標識碼:A
外骨骼步行穩定的重點在于如何保持支撐腳與地面的相對安穩,維持外骨骼人機系統的平衡,使外骨骼穿戴者步行時不發生傾倒。目前,零力矩點(Zero Moment Point,ZMP)是基于外骨骼人機系統動態步行是否穩定的重要指標。ZMP是人機整體所受的重力、慣性力和地面反作用力三者的合力,在地面上投影應呈限于兩腳之間,即支撐腳底與地面接觸所構成的最小凸多邊形有效撐持區間內,則外骨骼人機系統才能使穩定行走。下肢外骨骼在靜態行走時人機系統均處于平衡穩定狀況,對于地面上重心的投影能夠一直處于支撐面之內,因此外骨骼人機系統能達到穩定狀況。但是,下肢外骨骼在穿在人身上后動態步行時,人體的外界不確定性因素使外骨骼在前向和側向產生慣性力作用,會使ZMP隨著擺動腳的落地變化可能超出支撐區域,這樣就造成了人體在穩定與不穩定狀態中來回變換。可知ZMP穩定性判據對系統外界的干擾因素的動態穩定性評估具有一定的局限性。因此在ZMP穩定性判據的基礎上需對ZMP穩定性判據進行改進,改進的ZMP動態穩定性評估方法能有效地對下肢外骨骼冠狀面和矢狀面內動態穩定性進行評估。由于人機系統的運動過程比較復雜,如果同時考慮人機系統在行走過程中的側向和前向運動之間的耦合,那么分析會比較復雜。結合步態實際特征,為了得到人機系統運動受擾時平衡狀態的計算判定方法,本文僅考慮對在側向運動人機系統的穩定性分析。
1.動態步行穩定性檢測
下肢外骨骼在動態行走時,質心具有速度,即便質心投影處于支撐區域內部也有存在失穩的可能性,因此需要判斷下肢外骨骼運動受擾時是否處于平衡狀態。由于下肢外骨骼人機系統的側向運動可以簡化為倒立擺的模型運動并且具有周期性。
設人機的質量m集中于質量中心(center of mass, COM)。其中D1為質心的位移;D2為人體腳底在地面的反力與壓力中央的位移,它的范圍被限制在人體的撐持面區域(即BOS)內,其極限值分別為D2-min和D2-max,根據動力學原理,運動中若平衡,則人機系統運動中平衡的判斷條件為
其中,人機系統質心的速度大小是V1。
2.改進的動態穩定性評估方法
若參數發生相應的變化時,由(1)式可以很快判斷出此時人機系統是否平衡。如果人機系統的協同控制能力處于失穩狀態,首先要確定外骨骼人機系統所在的支撐多邊形(BOS)中哪個邊是旋轉邊界,由此可以計算出來ZMP到旋轉邊界之間的距離。本文假設腳掌形狀為矩形,那么兩只腳共包括8個邊。候選的BOS是所有連接兩只腳的8個角的連線。左腳的頂角點分別用P1,P3,P5,P7來表示,右腳用P2,P4,P6,P8表示,其中P(X,Y)。通過兩個點Pi和Pj的連線用Lij表示。
則ZMP到Lij的距離可表示為
其中,Pij是zmp到Lij的垂足的位置矢量。
假如已知ZMP所處的位置,則通過等式(4)可以來確定旋轉邊界。由于在實際步態穩定控制時需要按最大穩定裕度d的要求對規劃的外骨骼人機系統的姿態進行優化,亦可采用公式(5)來定量描述步態的穩定程度。當d大于零時,步態處于平穩狀態,且d的值越大,穩定性越好;當d等于零時,步態臨界處于穩定狀態;當d小于零時,則步態處于不穩定狀態。
3.步態控制策略
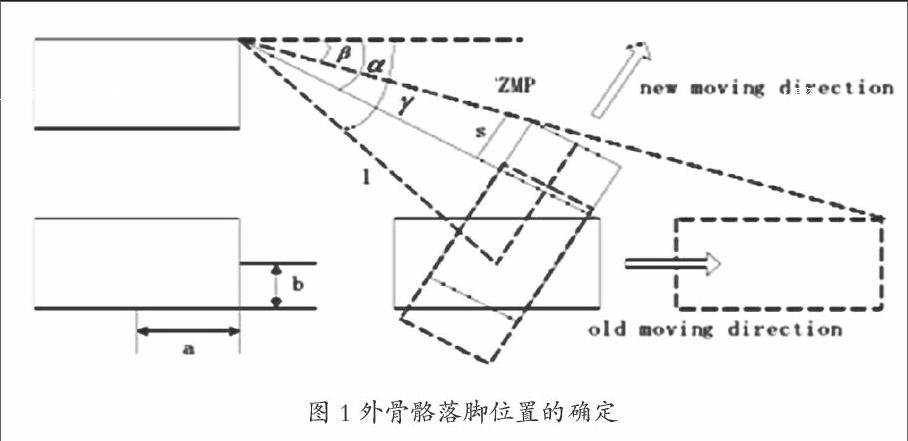
可以通過采用跨步的方式來改變撐持多邊形,從而達到下肢外骨骼在受到外力擾動的情況下仍保持其平衡。人采取的動作和行為,其機理是改變支撐多邊形,由于協調控制的要求,必須研究跨步隨動的控制機制(策略)。如圖1所示,在沒有外部力量支撐的條件下,則移動的腳應當處于正常步副的平面位置上。但在外力作用情況下,下肢外骨骼要繞著旋轉邊旋轉。這時,腳的落地位置應該改變,以達到人機系統保持平衡的要求。
腳所移動的距離I *f 可由下計算得出:
其中,a*為腳的移動方向改變角α為旋轉腳與水平線夾角,β為移動后腳與水平線夾角。
假設我們忽視腳部的額外移動所發生的重心改變量,則下肢外骨骼在新的落腳點與落腳時將是十分平穩的。
4.簡述仿真分析
完成人機系統的建模之后,我們采用動力學分析軟件ADAMS構建外骨骼人機系統的仿真型,對擴大步幅的仿真進行了考量。通過一系列的數據可以看出,當受到來自外部力量的作用時,外骨骼人機系統的平穩進行也能夠通過調整步幅來維持。
結語
本文對ZMP穩定性判據進行了改進,對人的外界干擾因素對下肢外骨骼人機系統的運動過程穩定性進行研究,按最大穩定裕量原則對步態進行優化。將下肢外骨骼簡化為倒立擺模型來進行動態步行穩定性分析。討論了維持穩定的方法:改變腳的著地位置。數字化仿真的模式體現了該方式的可行性。但如何實現可穿戴式下肢外骨骼在外界干擾下的實時控制還有待進一步研究。
參考文獻
[1]徐汝龍.一種可穿戴式下肢康復機器人的步態規劃及康復策略[D].西華大學,2012.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
