新型地鐵站臺門與車門之間頂置式防夾人自動探測系統的設計
2017-06-19 16:56:49饒美婉
城市軌道交通研究 2017年5期
關鍵詞:設置
饒美婉
(廣州地鐵設計研究院有限公司,510010,廣州 ∥ 高級工程師)
?
新型地鐵站臺門與車門之間頂置式防夾人自動探測系統的設計
饒美婉
(廣州地鐵設計研究院有限公司,510010,廣州 ∥ 高級工程師)
針對地鐵車站站臺門與車門之間空隙存在夾人夾物的安全問題,介紹了目前應用較廣泛的只適合于直線站臺的通過司機瞭望檢測方式的瞭望燈帶,以及受限界尺寸影響的激光對射探測方式存在檢測盲區的問題。提出了基于機器視覺的頂置式防夾人夾物的自動探測設計方案。該方案的安裝不受限界尺寸影響,探測范圍廣,盲區小,實現了對乘客及行車運營更為可靠的安全防護。
地鐵; 站臺門; 頂置式異物探測; 安全防護
Author′s address Guangzhou Metro Design & Research Institute Co.,Ltd.,510010,Guangzhou,China
站臺門作為軌道區與站臺區的隔離設備,其在保證運營安全、節能等方面的作用非常明顯。如今,國內各城市地鐵線路已經把站臺門作為必備設備而廣泛采用。同時,為了保證行車安全,站臺門在站臺的安裝位置(距軌道中心線的距離)應嚴格按照限界的要求。
本文結合目前應用較廣的設置瞭望燈帶通過司機瞭望檢測方式以及激光對射探測方式存在較大探測盲區的問題[2],提出了新的基于機器視覺的頂置式異物探測方案,解決了目前使用的探測方案遇到的困難,可實現對乘客及行車運營更為可靠的安全防護。
1 目前應用較廣的間隙探測方式
1.1 設置瞭望燈帶和三角擋板[3]
針對車門與站臺門之間的空隙,為方便司機在關閉站臺門后的瞭望,在限界允許的情況下,通用的做法是在每側站臺的列車進站端設置橡膠軟管燈帶,固定在1號站臺門單元立柱的設備區側;沿立柱從上至下安裝一條燈帶,固定燈帶的支架長度可調節,如圖1所示。如車門與站臺門之間有障礙物時,光帶被遮擋,則司機通過瞭望可發現障礙物。同時,在滑動門門體底部的機械結構上設置安全擋板(見圖2),并結合滑動門在關門過程中遇到障礙物探測功能,有效地防止乘客夾于列車與站臺門之間。在滑動門底部設置的安全擋板,完全覆蓋于門檻的表面上,加寬了站臺門門體障礙物探測的范圍。

圖1 瞭望燈帶設置
圖2 門體底部安全三角擋板
但對于曲線站臺,由于曲線限界和車輛限界的加寬,列車車門與站臺門之間的間隙相應增大,僅僅設置瞭望燈帶是無法滿足探測乘客或障礙物可能夾在車門和屏蔽門之間的問題。針對此問題,目前應用較多的方式為激光對射探測。
1.2 激光對射探測
激光發射器與接收器分別置于同一側站臺門的兩端[4-5],對車門與站臺門之間空隙進行探測,如圖3所示。
圖3 激光對射探測方案原理圖
曲線段站臺根據站臺的加寬情況由多組激光探測裝置組成,其設置方案如圖4所示。
圖4 曲線段站臺激光裝置安裝示意圖
對射探測方式探測距離長、設備簡單,但其對安裝對位要求極高,而且列車運行產生的振動容易造成發射器和接受器瞬時甚至是穩態對位失效,容易產生誤報;更突出的缺點是探測范圍有限,對射設備安裝在列車與站臺門之間,受限界尺寸限制,安裝位置只能超出站臺門20~30 mm,也就是探測的區域只有20~30 mm,剩余100~180 mm之間無法探測。 國內一些地鐵公司采用了該系統,但在實際使用后,由于出現探測范圍受限制且誤報率高的問題,致使后續線路都不再采用。
針對激光對射探測方式由于安裝位置受限界的限制,間隙探測范圍極小,且未從根本上解決該空隙的檢測,還存在一定的安全隱患等問題,有必要設計新的間隙探測方式。為此,提出了新的設計方案——基于機器視覺的站臺門與列車門之間頂置式異物探測設計方案。
2 基于機器視覺的頂置式防夾人自動探測系統設計
機器視覺就是利用攝像頭[6]和計算機來代替人眼進行測量和判斷。機器視覺系統主要由3部分組成[7]:圖像獲取,圖像處理和分析,圖像輸出或顯示。基于機器視覺的站臺門與車門之間的頂置式防夾人自動探測系統的設計,就是在每扇滑動門與列車門之間的間隙范圍內頂部設置一套視覺異物識別儀,對滯留在滑動門與列車門之間的異物進行自動探測;一旦探測到滯留在滑動門與列車門之間的異物(人、包、手等不應該存在的東西),探測系統通過設置在端門處的監控觸摸屏和對應滑動門上的門頭燈發出光報警信號,將危險狀況告知司機和站務人員,司機可通過監控觸摸屏顯示的存在異物視頻圖像確認。
2.1 基本原理
視覺識別儀向下拍攝縫隙內的燈帶圖像,在列車進站后滑動門開門前建立背景模板,在滑動門關閉且緊鎖后進行異物探測;如有異物,斷開異物探測結果繼電器,并通過網絡將信號和現場視頻傳送給監控主機,并在監控觸摸屏上顯示對應的門體情況。同時,視覺異物探測系統的探測信號串入站臺門安全回路,在異物未排除之前,將不允許列車出站。當然,該系統同時也具備旁路功能,可視需要脫離站臺門安全回路。
高校體育教學與專業課的教學存在著各方面較大的不同,但是在體育教學中也按照專業課程教學評價一樣進行相應的評價管理,并融入學生評教還是非常有意義的,大體體現在以下兩個方面:
每個站臺門門單元布置一套自動檢測單元,其中檢測單元的視覺識別儀設置位置比較關鍵。設置位置的選取取決于其拍出的視頻圖像是否清晰以及攝像范圍是否存在盲區。因此,設計上采用將圖像采集的攝像頭安裝在距離站臺面高3 m的混凝土頂梁下方,視覺識別儀的處理單元則設置在門機梁上,以方便后期的維護管理。頂置式的安裝方式避免了風壓震動導致圖像不清晰或誤報的情況,同時安裝高度的提高可進一步增大探測范圍(見圖5)。相應地,特征光帶設置于滑動門底部站臺外側面防踏空膠條處(見圖6)。
圖5 視覺識別儀探測范圍
機器視覺系統設計的難點在于探測時對光照的穩定性要求較高。因光帶安裝在門檻防踏空膠條下,站臺燈光可照射到膠條,準確度受到站臺光照的影響,因此設計上要重點考慮環境光的干擾以及保證主動照明光源的發光穩定性;同時,提高相機分辨率,也是抗環境干擾的解決措施之一。
2.2 系統接口設計
整個自動探測系統中,燈帶、視覺識別儀、組內交換機等設備電源引自站臺門門頭電源端子排,監控主機、交換機等設備電源引自站臺門機房內雙電源切換箱。

圖6 自動探測系統安裝示意圖
列車到站、出站信息從設置于出站端端門處的列車檢測器識別,站臺門系統將此信息傳輸給自動探測系統;自動探測系統接收到列車進站信息后開始進入工作狀態,并在列車進站后滑動門開啟前建立背景模板。
滑動門開門和關閉且鎖緊狀態由站臺門發送給自動探測系統;自動探測系統接收到站臺門發送的關閉且鎖緊狀態后進行異物探測。如探測到異物,則站臺門安全回路斷開(也可根據需要旁路此功能),對應門頭指示燈閃爍報警;同時,該信息傳送至端門監控觸摸屏,司機可通過視頻圖像再次確認是否存在異物。
自動探測系統接口設計原理圖見圖7。
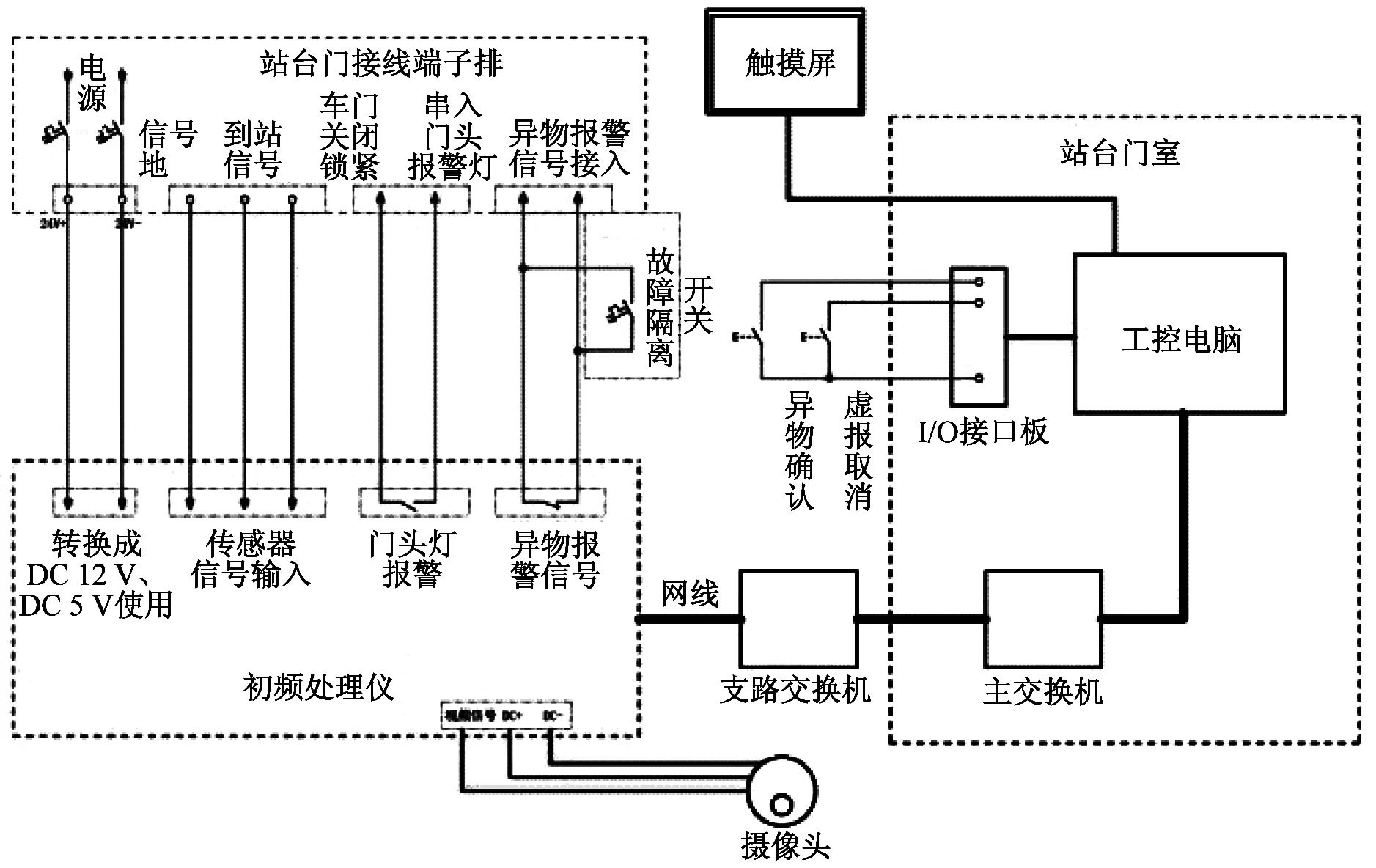
圖7 自動探測系統接口設計原理圖
2.3 系統性能指標
(1) 系統的平均無故障運行周期不小于60萬個周期。
(2) 系統運行強度滿足每天運行20 h,每90 s開/關1次,每年365 d連續運行。
(3) 系統可承受的震動水平滿足BS7854第一級水平。
(4) 在探測區域內的障礙物大于等于5 cm×5 cm。
(5) 系統的響應時間小于1 s。
(6) 系統最高幀掃頻率為25幀/s,掃描周期小于100 ms。
(7) 系統網絡滿足地鐵環境的電磁兼容要求。
2.4 系統特點
2.4.1 頂置式安裝探測范圍廣
視覺識別儀安裝在混凝土頂梁下部,受限界影響小,可靈活調整探測區域,滿足能探測到兩門之間中部位置的要求,避免了以往激光對射方式由于受限界影響僅能探測站臺門外30 mm范圍的弊端。
2.4.2 攝像頭防塵防水
攝像頭設置在軌道區,環境相對較差。考慮綜合因素,選用彩色攝像頭,其性能指標為:焦距2.1 mm,可視角度140°,最大分辨率3M,幀掃頻率最大可達30幀/s,工作溫度-10~50 ℃。同時,為防止長期運行后視覺識別儀鏡頭罩沾染灰塵,本方案中的鏡頭罩均涂有納米防塵材料。該防塵材料可使鏡頭罩保持光潔,不留水漬油漬,并避免粘灰。
2.4.3 模式可選,增強穩定性和可靠性
整個系統由自動和旁路兩種模式構成,每種模式可以單獨使用也可以混合使用,從而保證整個探測系統的穩定性和可靠性。當某個檢測單元發生不可恢復的故障時,可以對該檢測單元起動旁路模式,因而不影響其他檢測單元在自動模式下運行。因此,該系統可以同時讓多種模式并存進行探測來增強系統的可靠性。
視覺識別儀每天定時對燈帶區域進行檢查來判斷燈帶是否正常,同時與連接設備進行連通性檢測,并將檢測結果發送到監控主機。監控主機可根據各視覺識別儀的自檢結果來判斷設備是否存在異常。通過上述狀態實時監測設備,保障及時發現異常設備并進行維修。
2.4.4 LED光帶作為特征光帶
LED(發光二極管)光帶作為特征光帶設置在站臺門滑動門門檻邊,長3 m,燈珠100個/m,發光顏色為藍色,波長450 nm,單位長度光通量為42~90 lm/m,防護等級IP67,電源采用24 V安全直流電壓。
2.4.5 方便司機操作
系統在站臺門端頭處設置監控顯示屏,將探測到有異物的門體畫面顯示在屏幕上,方便司機查看。同時,設置有“誤報”和“異物確認”2個按鈕,當系統報出有異物時,司機可進行再次確認,以降低系統誤報而影響行車的概率。
3 結語
對于直線站臺,設置瞭望燈帶及三角擋板是屬于站臺門與車門之間空隙探測簡潔有效的防護措施,但司機必須下車瞭望檢查。對于曲線站臺,激光對射探測方案由于受限界限制,探測范圍小,盲區大。而基于機器視覺的站臺門與列車門之間頂置式自動探測系統,其頂置式布置的核心優勢在于不受限界影響,可探測兩門之間的任何位置,并且通過圖像二次確認,提高了可靠性。
隨著地鐵線網的延伸,地鐵車站曲線站臺的類型越來越多,站臺門與車門之間空隙存在的安全問題不容忽視。鑒于基于機器視覺的站臺門與車門之間頂置式自動探測系統是全新的方案,已作為科研項目在廣州地鐵運營車站的一個站臺門上進行了試驗,效果良好。結合試驗結果進一步完善改進后,該系統將應用于廣州地鐵線路的曲線站臺,不僅解決曲線站臺帶來的安全問題,并使以后實現司機無需下車瞭望從而提高運營行車效率成為可能。
[1] 中華人民共和國住房和城鄉建設部.地鐵設計規范:GB 50157—2013[S].北京:中國建筑工業出版社,2013.
[2] 黎競.屏蔽門激光誤報警原因分析與解決方案[J].中國高新技術企業,2013(1):75-76.
[3] 盧昌儀.防止地鐵屏蔽門與列車之間間隙夾人的方案[J].都市快軌交通,2008,21(5):82-84.
[4] 朱寧.地鐵屏蔽門激光防護方案研究[J].中國高新技術企業,2011(13):23-25.
[5] 張琨,趙加建.安全防護裝置在屏蔽門系統中的應用[J].城市軌道交通研究,2009(1):48-51.
[6] 郭進,張秀彬.基于圖像識別技術的站臺屏蔽門智能控制系統[J].微型電腦應用,2011(3):26-28.
[7] 韓九強.機器視覺技術及應用[M].北京:高等教育出版社,2009.
Design of Top Mounted Anti-pinch Automatic Detection System between Platform Screen Door and Train Door
RAO Meiwan
To avoid clamping problems caused by the gap between subway platform door and train door, the widely used outlook light band is introduced, which is only suitable for the linear platform and driver′s outlook detection, because of the blind area in laser detection affected by the limited size. So, the design of the top mounted foreign body detection based on machine vision is put forward, which has a wide detection range, smaller blind area and could not be affected by the limit of installation, the safety of passengers and more reliable protection for the vehicle operation are achieved.
metro; platform screen door; top mounted foreign matter detection; safety protection
U 231.4
10.16037/j.1007-869x.2017.05.031
2016-04-13)
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
水上消防(2020年5期)2020-12-14 07:16:18
中國畢業后醫學教育(2020年5期)2020-12-06 06:52:46
鐵道通信信號(2019年7期)2019-10-08 08:38:02
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
鐵道通信信號(2018年1期)2018-06-06 02:27:38
玩具世界(2017年9期)2017-11-24 05:17:29
作文評點報·低幼版(2017年42期)2017-11-16 22:12:34
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
