公交大客車獨(dú)立懸架前橋的車輪定位分析及調(diào)整方法
2017-06-19 15:20:56北京公共交通控股集團(tuán)有限公司呂則江
城市公共交通 2017年5期
北京公共交通控股(集團(tuán))有限公司 孫 鵬 呂則江
公交大客車獨(dú)立懸架前橋的車輪定位分析及調(diào)整方法
北京公共交通控股(集團(tuán))有限公司 孫 鵬 呂則江
公交大客車應(yīng)用獨(dú)立懸架前橋越來(lái)越多,如何正確維護(hù)、調(diào)整獨(dú)立懸架前橋已成為亟待解決的問(wèn)題。目前,北京公交在用的12米、18米等車型裝配的獨(dú)立懸架前橋主要有RL-85EC(ZF品牌)和VN75(青年車橋品牌)兩種型號(hào)。
獨(dú)立懸架前橋的優(yōu)點(diǎn)是車橋輕量化,非懸掛質(zhì)量小,使車身受到的沖擊減少,提高了車輛行駛平順性和車輪附著性能;左右車輪單獨(dú)跳動(dòng),互不相干,減少了車身的傾斜和震動(dòng)。
但獨(dú)立懸架系統(tǒng)結(jié)構(gòu)復(fù)雜,特別是前橋定位技術(shù)與非獨(dú)立懸架的區(qū)別較大,對(duì)維修人員操作技術(shù)要求較高,而對(duì)獨(dú)立懸架前橋的定位調(diào)整,從設(shè)備應(yīng)用到人員培訓(xùn)需進(jìn)行專項(xiàng)研究和資金投入。
1 獨(dú)立懸架前橋在應(yīng)用中遇到的問(wèn)題和誤區(qū)
北京公交首批投入運(yùn)營(yíng)的獨(dú)立懸架前橋的公交車,累計(jì)運(yùn)行達(dá)到12萬(wàn)公里時(shí),部分車輛出現(xiàn)轉(zhuǎn)向沉重、跑偏、不歸位或輪胎過(guò)度磨損現(xiàn)象,司機(jī)反映駕駛時(shí)車輛有顛簸、搖擺等情況;獨(dú)立懸架前橋的機(jī)件間相互接觸不但影響轉(zhuǎn)向時(shí)內(nèi)、外輪轉(zhuǎn)向角度及轉(zhuǎn)向前束,而且在轉(zhuǎn)向助力的作用下,還會(huì)將橫拉桿擠壓變形,造成損壞。結(jié)合保養(yǎng)制度規(guī)定,當(dāng)更換獨(dú)立懸架前橋上的易損部件或者出現(xiàn)上述故障時(shí),就應(yīng)檢查車輪定位值,需要進(jìn)行四輪定位檢測(cè)。維修人員開始按照以往的調(diào)整經(jīng)驗(yàn)進(jìn)行前束測(cè)量及上線側(cè)滑檢測(cè),對(duì)獨(dú)立懸架橫、直拉桿調(diào)整還延續(xù)非獨(dú)立懸架的調(diào)整方法,即調(diào)整任意一根橫拉桿的長(zhǎng)度,從而完成前束調(diào)整“0-1mm”的標(biāo)準(zhǔn),但是行駛一段時(shí)間后,車輛故障依然存在。
究其原因,為了滿足駕駛的穩(wěn)定性要求,獨(dú)立懸架前橋橫拉桿由三根短拉桿組成,調(diào)整任意一根橫拉桿,都能輕松完成“0”前束調(diào)整,但這樣調(diào)整卻直接破壞了獨(dú)立懸架的其它特性參數(shù)。
為了進(jìn)一步解決公交車輛獨(dú)立懸架前橋在使用過(guò)程中的維護(hù)、調(diào)整問(wèn)題,需要對(duì)獨(dú)立懸架系統(tǒng)進(jìn)行研究和分析,并提出解決方案。
2 車輪定位概述
汽車的轉(zhuǎn)向車輪、轉(zhuǎn)向節(jié)和前軸三者之間的安裝具有一定的相對(duì)位置,這種具有一定相對(duì)位置的安裝叫做轉(zhuǎn)向車輪定位,也稱前輪定位。前輪定位包括主銷后傾角、主銷內(nèi)傾角、前輪外傾角和前輪前束(亦可用前束角表示)。這是對(duì)兩個(gè)轉(zhuǎn)向前輪而言,對(duì)兩個(gè)后輪來(lái)說(shuō)也同樣存在與后軸之間安裝的相對(duì)位置,稱后輪定位。前輪定位和后輪定位總稱為四輪定位。
車輪定位的作用是使汽車保持穩(wěn)定的直線行駛和轉(zhuǎn)向輕便,提高車輛行駛穩(wěn)定性,并減少汽車在行駛中輪胎和轉(zhuǎn)向機(jī)件的磨損。由于各汽車生產(chǎn)廠家對(duì)四輪定位原設(shè)計(jì)不同,使車輪定位各有不同,并有可調(diào)部分和不可調(diào)部分之分。
3 獨(dú)立懸架前橋前束定位調(diào)整分析
前橋是轉(zhuǎn)向橋,它除了能夠承受各方向的力和力矩外,還能使裝在車橋兩端車輪偏轉(zhuǎn)一定的角度,以實(shí)現(xiàn)汽車的轉(zhuǎn)向,保證汽車所需要的行駛方向。由于獨(dú)立懸架前橋有著特殊結(jié)構(gòu),用非獨(dú)立懸架前橋的傳統(tǒng)調(diào)整方法則無(wú)法正確調(diào)整前輪前束。
通常情況下,車輛的前束為正前束或“0”前束,北京公交采用的兩種型號(hào)前橋均采用“0”前束設(shè)計(jì)。
3.1 前束標(biāo)準(zhǔn)狀態(tài)(“0”前束)
依據(jù)前橋特性參數(shù),繪制出標(biāo)準(zhǔn)狀態(tài)如圖1所示。
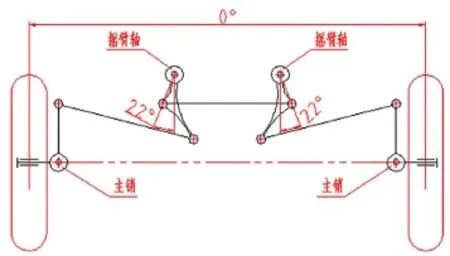
圖1 “0”前束標(biāo)準(zhǔn)狀態(tài)
從圖1中可以看到,轉(zhuǎn)向搖臂上中間橫拉桿球頭和轉(zhuǎn)向搖臂軸形成直線的延長(zhǎng)線(以下簡(jiǎn)稱轉(zhuǎn)向搖臂延長(zhǎng)線)與車身中心線形成的角度關(guān)系。轉(zhuǎn)向搖臂延長(zhǎng)線與車身中心線的夾角為22°,且左、右兩個(gè)夾角相等并對(duì)稱。
標(biāo)準(zhǔn)狀態(tài)車輪最大轉(zhuǎn)向角及轉(zhuǎn)向前束如圖2所示。
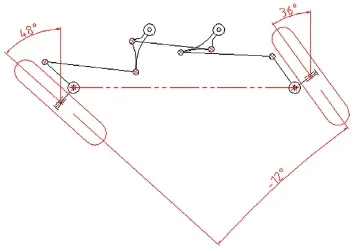
圖2 標(biāo)準(zhǔn)狀態(tài)下最大左轉(zhuǎn)向狀態(tài)
圖2 為標(biāo)準(zhǔn)狀態(tài)下左轉(zhuǎn)向時(shí),最大內(nèi)、外輪轉(zhuǎn)向角及最大轉(zhuǎn)向前束的標(biāo)準(zhǔn)特性參數(shù)值。
3.2 正負(fù)前束狀態(tài)(超標(biāo)準(zhǔn)狀態(tài))
前束超出標(biāo)準(zhǔn)狀態(tài)時(shí),通常會(huì)有兩種情況出現(xiàn):一種是負(fù)前束值過(guò)大,另一種是正前束值過(guò)大。這兩種情況通常稱之為負(fù)前束和正前束。在這兩種情況中,還存在著單輪負(fù)前束和單輪正前束的狀態(tài)。
當(dāng)獨(dú)立懸架前橋的前束超出標(biāo)準(zhǔn)狀態(tài)時(shí),調(diào)整三根橫拉桿中任意一根橫拉桿的長(zhǎng)短,都能實(shí)現(xiàn)“0”前束的調(diào)整。但調(diào)整后雖能滿足“0”前束的要求,卻破壞了獨(dú)立懸架前橋其它的特性參數(shù)值,如車輪內(nèi)轉(zhuǎn)角和轉(zhuǎn)向前束等。
假設(shè)左、右兩根橫拉桿等長(zhǎng),但長(zhǎng)于標(biāo)準(zhǔn)值。其它參數(shù)處于標(biāo)準(zhǔn)狀態(tài),即左、右轉(zhuǎn)向搖臂延長(zhǎng)線與車身中心線的夾角(22°)及中間橫拉桿長(zhǎng)度處于標(biāo)準(zhǔn)狀態(tài)。
負(fù)前束狀態(tài)如圖3所示。
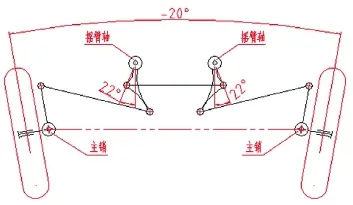
圖3 負(fù)前束狀態(tài)
如圖3,由于左、右橫拉桿長(zhǎng)于標(biāo)準(zhǔn)值而其他參數(shù)不變,因此形成負(fù)前束狀態(tài)。
圖4為負(fù)前束調(diào)整后的“0”前束狀態(tài)。該“0”前束的調(diào)整是通過(guò)縮短中間橫拉桿長(zhǎng)度方法實(shí)現(xiàn)的,但此時(shí)轉(zhuǎn)向搖臂延長(zhǎng)線與車身中線的夾角變?yōu)?2°,小于標(biāo)準(zhǔn)值。
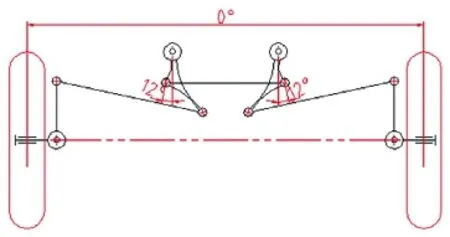
圖4 調(diào)整中間橫拉桿后的“0”前束狀態(tài)
調(diào)整中間橫拉桿實(shí)現(xiàn)“0”前束后,車輪外輪轉(zhuǎn)向角及轉(zhuǎn)向前束值都不符合標(biāo)準(zhǔn)(圖5)。當(dāng)負(fù)前束值增大到一定數(shù)值時(shí),右橫拉桿會(huì)與中間橫拉桿右端球頭發(fā)生接觸,在這種狀態(tài)運(yùn)行的車輛極易造成獨(dú)立懸架轉(zhuǎn)向機(jī)件的損壞。
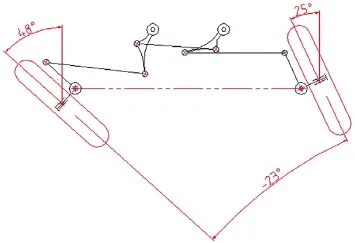
圖5 最大左轉(zhuǎn)向狀態(tài)
如果左、右轉(zhuǎn)向搖臂延長(zhǎng)線與車身中心線的夾角為22°,但左、右橫拉桿等長(zhǎng)且小于標(biāo)準(zhǔn)值,就會(huì)形成正前束狀態(tài)。其調(diào)“0”原理與負(fù)前束時(shí)的問(wèn)題類似,不再贅述。
3.3 單輪正負(fù)前束
假設(shè)左橫拉桿過(guò)長(zhǎng)且超出標(biāo)準(zhǔn)值,其它參數(shù)處于標(biāo)準(zhǔn)狀態(tài),即左、右轉(zhuǎn)向搖臂延長(zhǎng)線與車身中心線夾角(22°)、中間橫拉桿及右橫拉桿長(zhǎng)度都處于標(biāo)準(zhǔn)狀態(tài)。
由于左橫拉桿過(guò)長(zhǎng)而其他參數(shù)不變,因此形成單輪負(fù)前束狀態(tài),如圖6所示。

圖6 單輪負(fù)前束狀態(tài)
圖7 為按照以往的經(jīng)驗(yàn)通過(guò)縮短中間橫拉桿長(zhǎng)度方法實(shí)現(xiàn)的“0”前束,但此時(shí)左轉(zhuǎn)向搖臂與車身中線的夾角變?yōu)?5°,小于標(biāo)準(zhǔn)值。
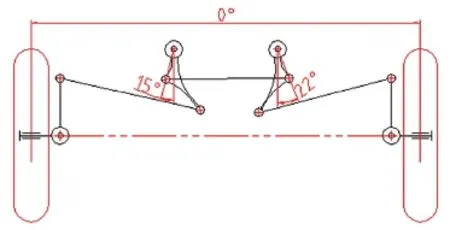
圖7 單輪負(fù)前束調(diào)整后的“0”前束狀態(tài)
圖8 為調(diào)整后的最大左轉(zhuǎn)向狀態(tài),其最大外輪轉(zhuǎn)角及轉(zhuǎn)向前束值都不符合標(biāo)準(zhǔn)值。
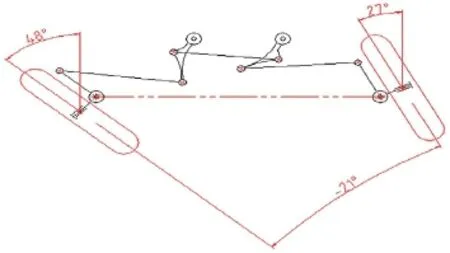
圖8 單輪負(fù)前束調(diào)整后的最大左轉(zhuǎn)向狀態(tài)
因?yàn)閱屋嗀?fù)前束狀態(tài),左、右橫拉桿長(zhǎng)度不相等,故失去了左、右轉(zhuǎn)向時(shí)的對(duì)稱性,導(dǎo)致了最大左、右轉(zhuǎn)向狀態(tài)的特性參數(shù)不同,所以還需要對(duì)單輪負(fù)前束調(diào)整后的最大右轉(zhuǎn)向角進(jìn)行分析。
調(diào)整后最大右轉(zhuǎn)向狀態(tài)如圖9所示。
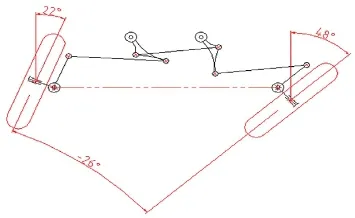
圖9 單輪負(fù)前束調(diào)整后的最大右轉(zhuǎn)向狀態(tài)
從圖9中可以看出,調(diào)整后外輪轉(zhuǎn)向角及轉(zhuǎn)向前束值都不符合標(biāo)準(zhǔn)值。通過(guò)對(duì)比圖8和圖9,可以明顯看出左、右外輪轉(zhuǎn)向角及轉(zhuǎn)向前束對(duì)應(yīng)數(shù)值不等。
如果左、右轉(zhuǎn)向搖臂延長(zhǎng)線與車身中心線的夾角為22°,中間橫拉桿和右橫拉桿長(zhǎng)度均為標(biāo)準(zhǔn)狀態(tài),但由于左橫拉桿過(guò)短而小于標(biāo)準(zhǔn)值,就會(huì)形成單輪正前束初始狀態(tài),其調(diào)“0”原理與單輪負(fù)前束時(shí)的問(wèn)題類似,也不贅述。
4 獨(dú)立懸架前橋的調(diào)整方法
通過(guò)以上分析,傳統(tǒng)的調(diào)整方法和技術(shù)手段雖能滿足調(diào)整獨(dú)立懸架前橋“0”前束的要求,但調(diào)整后的外輪轉(zhuǎn)向角及轉(zhuǎn)向前束值均不符合標(biāo)準(zhǔn)值。
由于獨(dú)立懸架車橋結(jié)構(gòu)的特殊性,在維護(hù)和調(diào)整中需要借助儀器或?qū)S迷O(shè)備,常用四輪定位儀對(duì)獨(dú)立懸架車橋進(jìn)行定位檢測(cè),并依托四輪定位儀進(jìn)行定位調(diào)整。
4.1 準(zhǔn)備工作
為保證車輛定位后的調(diào)整質(zhì)量,在定位前需要做一些必要的車輛檢查和儀器設(shè)備檢查。
(1)車輛檢查。一是輪胎氣壓應(yīng)符合技術(shù)標(biāo)準(zhǔn),目測(cè)輪胎磨損情況。要求同軸輪胎花紋相同,且磨損情況基本相同,各輪輞無(wú)變形、無(wú)磨損;二是檢查車橋各連接件。要求獨(dú)立懸架系統(tǒng)安裝牢固,各零部件完好,空氣懸架氣囊、推力桿連接良好,轉(zhuǎn)向拉桿安裝牢固,拉桿球頭無(wú)松曠,拉桿鎖止機(jī)構(gòu)有效。
(2)設(shè)備檢查。四輪定位儀屬于精密測(cè)試設(shè)備,內(nèi)有敏感元件,在使用過(guò)程中應(yīng)輕拿輕放,切勿亂扔亂摔,否則可能使外殼變形,甚至導(dǎo)致內(nèi)部元件出現(xiàn)故障,影響正常使用。
4.2 檢測(cè)過(guò)程
在完成四輪定位前的各項(xiàng)準(zhǔn)備工作后,根據(jù)四輪定位儀的提示和操作內(nèi)容,逐步進(jìn)行各項(xiàng)檢測(cè)(圖10)。
檢測(cè)主要包括前束角、前輪外傾角、主銷后傾角、主銷內(nèi)傾角等基本特性參數(shù),利用四輪定位儀的功能還可測(cè)量輪距、軸距數(shù)值。
4.3 調(diào)整規(guī)律
在完成四輪定位檢測(cè)后,開始對(duì)超出特性參數(shù)的部位進(jìn)行調(diào)整,應(yīng)按照四輪定位儀顯示的實(shí)時(shí)數(shù)據(jù)進(jìn)行調(diào)整。
在定位調(diào)整時(shí),要遵循先位置后角度的調(diào)整規(guī)律,即要先確定車橋位置,然后再進(jìn)行角度調(diào)整。在角度調(diào)整時(shí),要先調(diào)整車輪外傾角,再調(diào)整前束角,其原因是車橋位置與定位角度之間相互牽連,相互制約。遵循調(diào)整規(guī)律,可避免重復(fù)勞動(dòng),能夠提高工作效率。
4.4 調(diào)整后的檢查
(1)定位參數(shù)檢查。定位調(diào)整后,需要使用四輪定位儀進(jìn)行定位檢測(cè),以驗(yàn)證定位調(diào)整結(jié)果。如果檢測(cè)結(jié)果超出標(biāo)準(zhǔn)范圍,還需回到上一步重新進(jìn)行調(diào)整。
(2)最大轉(zhuǎn)向角檢查。獨(dú)立懸架前橋在定位調(diào)整后,對(duì)最大轉(zhuǎn)角的檢查非常重要,由于北京公交車輛使用了ZF轉(zhuǎn)向機(jī)及轉(zhuǎn)向助力系統(tǒng),在車輪旋轉(zhuǎn)到最大轉(zhuǎn)向角時(shí)應(yīng)停止助力。在定位調(diào)整時(shí),很可能破壞轉(zhuǎn)向助力控制系統(tǒng)的正常工作,引起轉(zhuǎn)向系統(tǒng)機(jī)件損壞,造成機(jī)械故障,所以在定位調(diào)整后,要啟動(dòng)發(fā)動(dòng)機(jī)檢查最大左、右轉(zhuǎn)向角的卸荷情況,確保在最大左、右轉(zhuǎn)向角時(shí)轉(zhuǎn)向助力控制系統(tǒng)處于卸荷狀態(tài)。
(3)路試檢查。在完成以上檢查及調(diào)整工作后,需要進(jìn)行路試檢查。在路試中要注意車輛運(yùn)行狀況,直線行駛是否跑偏,左、右轉(zhuǎn)向后是否能夠自動(dòng)回正等操控性檢查。
5 總結(jié)
(1)通過(guò)綜合分析獨(dú)立懸架前橋前束值超差的原因及誤調(diào)整帶來(lái)的影響,說(shuō)明不能用非獨(dú)立懸架前橋的傳統(tǒng)調(diào)整方法對(duì)獨(dú)立懸架車橋進(jìn)行車輪定位調(diào)整。
(2)針對(duì)獨(dú)立懸架前橋的參數(shù)特性和技術(shù)特點(diǎn),運(yùn)用四輪定位的調(diào)整原則和方法,結(jié)合公交車輛特點(diǎn)制定車輪定位的檢測(cè)流程和技術(shù)標(biāo)準(zhǔn),對(duì)被測(cè)車輛的前束值和各車輪定位角進(jìn)行正確的調(diào)整。
(3)通過(guò)對(duì)獨(dú)立懸架前橋車輪定位的正確調(diào)整,能夠減少輪胎的異常磨損,保證車輛的操控可靠性,確保轉(zhuǎn)向機(jī)構(gòu)的安全性和平穩(wěn)性。
(4)對(duì)獨(dú)立懸架前橋車輪定位的調(diào)整要結(jié)合公交車輛的保養(yǎng)制度和檢查標(biāo)準(zhǔn),加強(qiáng)獨(dú)立懸架前橋使用狀態(tài)的預(yù)判,循序漸進(jìn)地做好獨(dú)立懸架前橋車輪定位的檢查和調(diào)整。需要強(qiáng)調(diào)的是,前期的正確維護(hù)和檢測(cè)比故障出現(xiàn)后的調(diào)整更為重要。

圖10 四輪定位檢測(cè)流程圖
