新型有軌電車道岔控制方案分析
2017-06-23 13:49:40楊學鋒
環球市場 2017年15期
關鍵詞:設備
楊學鋒
武漢市城建工程有限公司
新型有軌電車道岔控制方案分析
楊學鋒
武漢市城建工程有限公司
現代有軌電車工程由于其本身的特點及運行環境的復雜性,與傳統的地鐵和輕軌相比存在著明顯的特殊性,這就要求要在詳細分析其功能需求的基礎上,借鑒類似工程的經驗,合理做出選擇,因此進一步加強對其的研究非常有必要。基于此本文分析了新型有軌電車道岔控制方案。
新型有軌電車;道岔控制;方案
1 、新型有軌電車概述
新型有軌電車由傳統有軌電車全面升級而來。與道路公交相比,車輛壽命是道路公交的3倍左右,運輸效率高于快速公交,且有利于環保。與地鐵和輕軌相比,其造價低、正線站間距小、路權相對開放、車站結構簡單、可以兩輛近距離排列運行、一般通過人工駕駛。
正因這些區別,新型有軌電車的正線信號系統的功能需求有別于其他軌道交通,新型有軌電車無需超速防護、安全間隔駕駛、自動駕駛和精確停車的需求。在正線道岔區域,有軌電車需要使用與地鐵、輕軌類似的聯鎖控制。有軌電車信號系統需通過對軌旁信號設備狀態的采集來實現進路選排、道岔轉換、鎖閉和解鎖及信號機的開放,司機駕駛電車根據信號燈的指示行車。由此可知,在有軌電車正線信號系統中,保證行車安全的任務由道岔控制系統完成。本文對道岔控制系進行討論分析,有軌電車信號系統的結構如圖1所示。
2 、現代有軌電車正線運行需求分析
有軌電車正線信號系統有著與傳統城市軌道交通不同的功能需求,具體表現在:
1)無安全間隔控制需求(長大隧道路段除外)。在地鐵或輕軌中常用的正線信號系統通常具備ATP防護的列車控制功能,以保證高運量、封閉環境中追蹤列車運營安全。但是在有軌電車工程中,線路不完全封閉,存在與地面公共交通的平面交叉路口和相對開放的運營環境,它決定了傳統的ATP防護功能并不能防止電車和社會車輛、行人之間的沖突,達不到其控制目的。如采用ATP防護,在有軌電車復雜的路權環境中,將導致ATP的功能需求更高更復雜,不僅增加工程投資,而且會增加司機的依賴性、降低司機的警覺性,對與社會車輛和行人發生事故埋下一定的安全隱患。
2)無超速防護需求,但有一定的輔助駕駛告警需求。有軌電車允許其具備靈活的運營組織、2輛以上的車可以以很近的間距排列行駛或站內停靠。因此,系統無超速防護需求,只要求司機保證避免追尾和沖撞。在曲線限速段、轉彎處、路口、長大下坡等路段,可對司機進行語音提醒,但無控制功能。
3)無ATO自動駕駛和精確停車需求。由于有軌電車采用人工駕駛模式,所以無ATO自動駕駛需求。同時,在站臺的停車作業也是由司機來操作完成的,無精確停車需求。
3 、有軌電車道岔控制方案
本文對道岔控制方案的研究基于運營調度管理系統采用GPS/BD與列車位置檢測設備組合方案,以GPS/BD作為基本的列車定位模式。列車在區間或非道岔區段運行時,采用GPS/BD實時定位;列車運行至道岔區段時,采用列車位置檢測設備進行精確定位,保證行車安全。有軌電車道岔控制系統如圖2所示。
正線道岔控制系統主要包括轉轍機(地埋式)、地面控制箱、無線通信單元、進路表示器、列車位置檢測設備、電源設備等。車載和地面采用無線通信進行數據交換。
3.1 道岔控制方式
根據系統特點,道岔控制方式可分為自動進路控制和車載遙控兩種
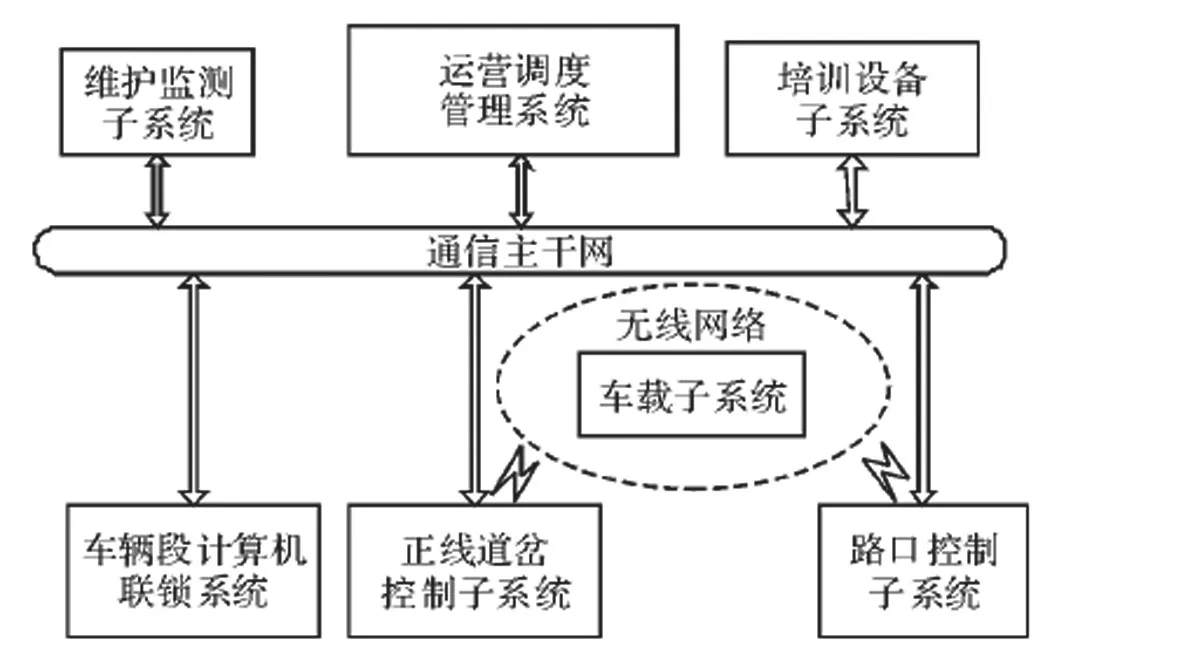
圖1 有軌電車信號系統結構示意圖
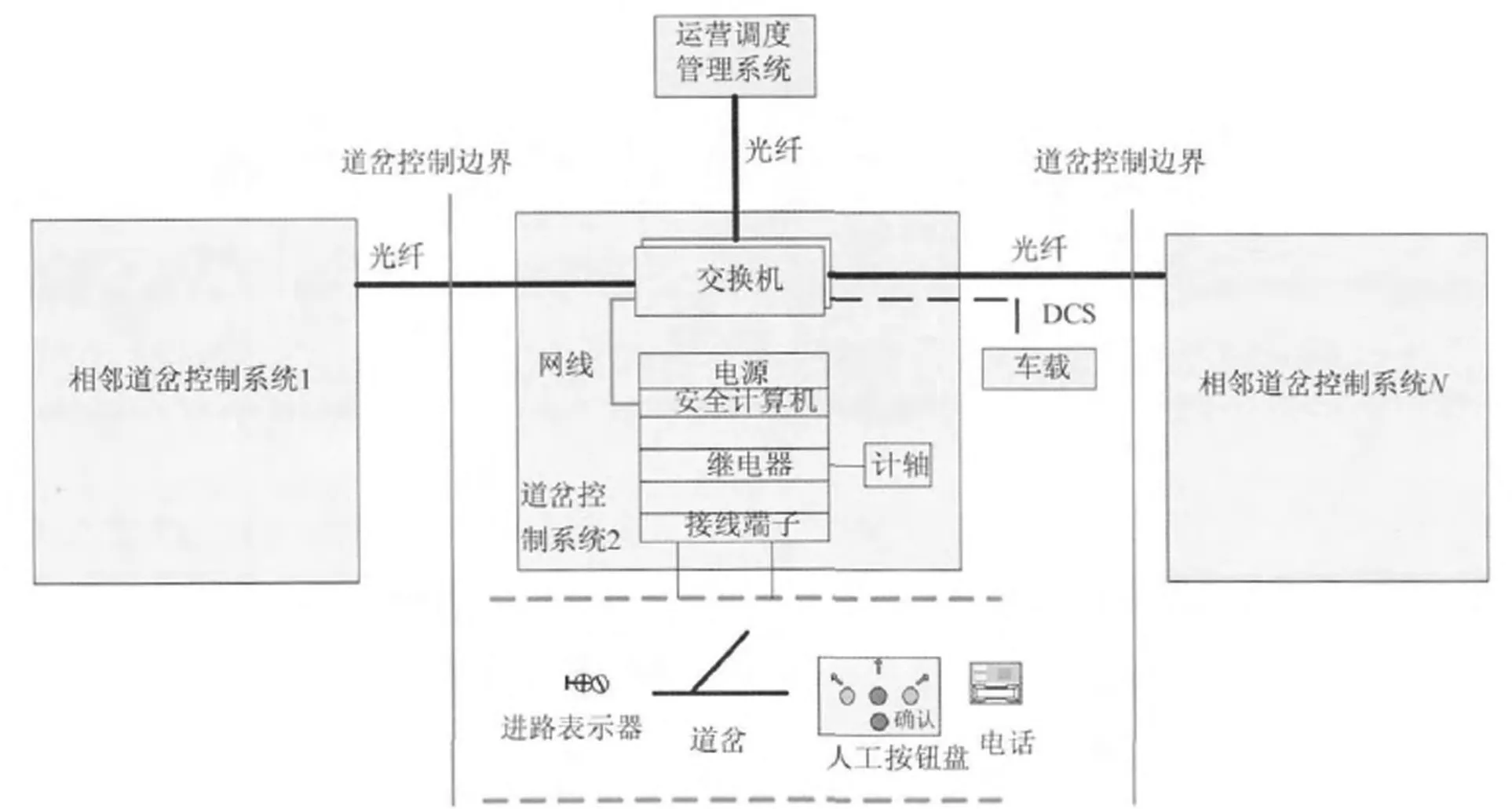
圖2 有軌電車道岔控制系統
3.1.1 自動進路控制
運營調度管理系統將當日的列車時刻表通過軌旁光纖網絡傳輸至沿線的每個道岔控制器,并事先規定了列車的運行方向。列車根據當日時刻表運行,當接近道岔區段時,列車通過道岔區域的車地短程無線通信向地面控制設備發送請求信息;地面控制設備接收到請求信息后,結合地面檢測設備的信息,將請求反饋信息發送給車載設備;車載設備接收到地面道岔控制設備發送的信息后,自動反饋確認信息至地面控制設備;地面控制設備根據計軸設備和進路表示器狀態,檢查信號開放條件滿足后,自動完成道岔轉換并鎖閉道岔。列車通過該道岔區段后,道岔控制權自動釋放。該道岔控制方式安全可靠,行車效率高,系統的自動化程度較高,且符合軌道交通領域的發展方向。
3.1.2 車載遙控系統
車載遙控控制模式,與自動控制方式最主要區別是依賴電車司機來進行人工辦理進路。當電車通過道岔接近區段位置時,道岔控制器未接收到車載的道岔控制命令時,道岔控制器發送提示信息給車載,車載語音提示司機人工辦理進路,司機減速行車,按壓車載上相應按鈕進行人工辦理進路,感應環線將進路信息發送給道岔控制系統,道岔控制系統接收到進路命令后,進行聯鎖關系運算,確保安全后將道岔轉換至相應的位置并鎖閉,同時開放信號機。當軌道電路檢測到列車通過道岔區段后,進路自動解鎖,車載系統自動解除人工控制道岔的功能。
該道岔控制方式自動化程度較低,人為因素對行車安全和系統可靠性影響較大,同時也增加了司機的勞動強度。
3.1.3 現地控制
當通過自動進路控制方式或車載遙控方式都無法辦理進路時,工作人員操作現地操作盤辦理進路,道岔控制系統中的聯鎖邏輯控制器通過開關量采集單元接收進路信息,完成進路的辦理。
3.1.4 故障情況下的控制模式
在故障模式下,需要人工確認道岔區段空閑,通過人工操作道岔按鈕或人工搬動道岔。在這種方式下,車載設備和道岔控制器均不作任何邏輯運算。
3.2 道岔控制系統接受命令方式
表1體現了系統設備在不同組合狀態下道岔控制器通過不同途徑來接受進路命令。
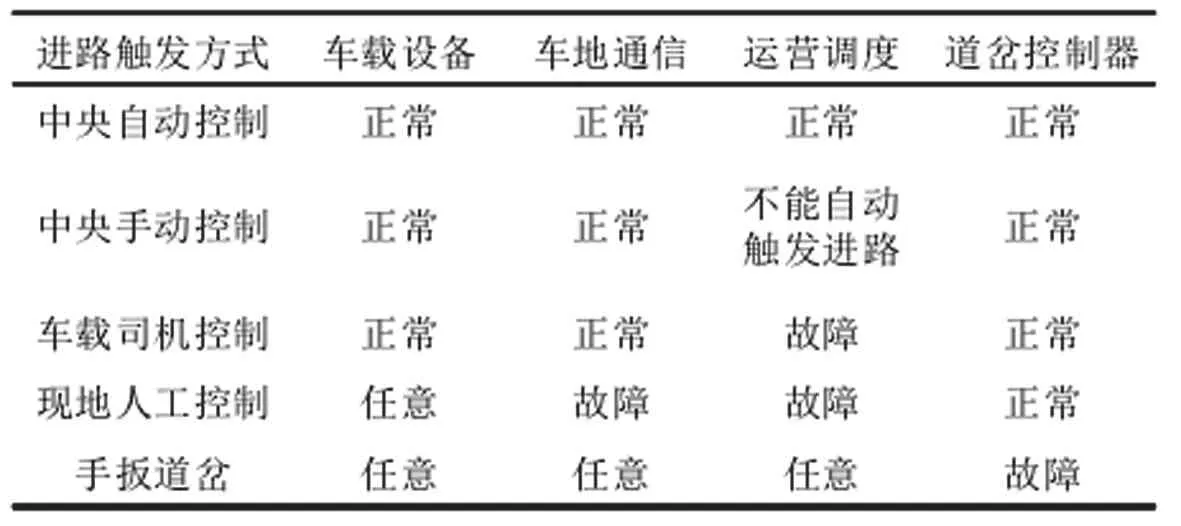
表1 進路命令接受
總之,有軌電車正線道岔控制系統在造價允許的情況下可實現控制系統的全部冗余備用,可以顯著提高系統的可靠性,減少日常維護,該系統具有很好的應用前景和推廣價值,因此進一步加強對其的研究非常有必要。
[1]薛洪峰.現代有軌電車信號控制關鍵技術研究[D].北京交通大學,2013.
[2]劉新平.新型有軌電車信號系統方案研究[J].城市軌道交通研究,2012,05:50-52+60.
[3]原志彬.現代有軌電車新型車載運行控制系統原理樣機的研制[D].北京交通大學,2012.
[4]巫偉軍.有軌電車系統特點及應用前景研究[J].鐵道標準設計,2007(8):122-125.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00