兩足并聯(lián)腿機(jī)構(gòu)工作空間分析
2017-06-24 13:25:48戚開誠張建軍劉宇紅商鵬
河北工業(yè)大學(xué)學(xué)報(bào) 2017年2期
戚開誠,張建軍,劉宇紅,商鵬
(河北工業(yè)大學(xué)機(jī)械工程學(xué)院,天津300130)
兩足并聯(lián)腿機(jī)構(gòu)工作空間分析
戚開誠,張建軍,劉宇紅,商鵬
(河北工業(yè)大學(xué)機(jī)械工程學(xué)院,天津300130)
采用并聯(lián)機(jī)構(gòu)3-UrPS作為兩足步行器的腿部機(jī)構(gòu),3-UrPS中3個(gè)Ur采用等腰對(duì)稱布置,建立了兩足步行器的三維CAD模型及其虛擬樣機(jī),分析了3-UrPS并聯(lián)機(jī)器人的反解,并根據(jù)反解研究該機(jī)構(gòu)的定姿態(tài)工作空間.基于三維空間搜索的方法在MATLAB中得到了工作空間的三維形狀,展示了工作空間的大小.結(jié)果表明該機(jī)構(gòu)可用于作為步行器的腿部機(jī)構(gòu),為控制研究奠定基礎(chǔ).
3-UrPS;定姿態(tài);工作空間;并聯(lián)機(jī)構(gòu);三維搜索法
0 引言
并聯(lián)機(jī)構(gòu)具有承載力高、高剛度等優(yōu)點(diǎn),少支鏈6自由度并聯(lián)機(jī)構(gòu)由于支鏈之間的干涉少,結(jié)構(gòu)緊湊,而得到廣泛研究.許多學(xué)者采用了不同的機(jī)構(gòu)用于承載用的步行器.Daniele Cafolla[1]研制仿人機(jī)器人,腿部機(jī)構(gòu)是三自由度并聯(lián)機(jī)構(gòu);王洪波[2-9]等分析3自由度3-UPU并聯(lián)機(jī)構(gòu),以及其兩兩合并后的6-SPU并聯(lián)機(jī)構(gòu),討論它們?cè)谒淖?兩足可重組并聯(lián)腿步行機(jī)器人中的應(yīng)用;王云等[7]研究了基于3-RPS機(jī)構(gòu)的四足步行器特性;金振林[8-9]等基于3-UPS機(jī)構(gòu)研究了雙足以及六足步行器的運(yùn)動(dòng)特性;范順成[10]等基于Stewart機(jī)構(gòu)分析了兩足并聯(lián)腿的運(yùn)動(dòng)仿真特性;榮譽(yù)等[11]提出了1種基于(U+UPS)P+UPS機(jī)構(gòu)的三自由度并聯(lián)機(jī)械腿,建立了機(jī)械腿機(jī)構(gòu)的誤差模型;Tao L[12]等提出了1種7自由度平面機(jī)構(gòu)步行腿,實(shí)現(xiàn)了直線行走;Rodriguez-Cianca[13]基于柔性機(jī)構(gòu)提出了一種柔性關(guān)節(jié)應(yīng)用于步行器的腳趾關(guān)節(jié).
以上學(xué)者采用的機(jī)構(gòu)其主動(dòng)副是P副[7-10],加在了支鏈的中間副上,存在問題是慣性大;平面機(jī)構(gòu)受其結(jié)構(gòu)限制,只能直線行走[12].采用三支聯(lián)六自由度并聯(lián)機(jī)構(gòu),并且采用兩自由度球面復(fù)合鉸鏈Ur,解決了自由度單一以及驅(qū)動(dòng)輸入的問題.
本文采用3-UrPS并聯(lián)機(jī)構(gòu)作為兩足步行器腿部結(jié)構(gòu),建立了其虛擬樣機(jī),分析了其機(jī)構(gòu)反解,基于三維搜索法研究了其工作空間,得到了其定姿態(tài)的工作空間的三維形狀.
1 兩足并聯(lián)腿CAD模型
采用3-UrPS作為腿機(jī)構(gòu),該機(jī)構(gòu)由3條支鏈組成,Ur副結(jié)構(gòu)示意圖如圖1所示,并聯(lián)腿機(jī)構(gòu)3-UrPS中Ur采用等腰對(duì)稱布置,如圖2是固定平臺(tái)3個(gè)Ur副的布置簡(jiǎn)圖;動(dòng)平臺(tái)的球鉸布置如圖3所示.

圖1 Ur副結(jié)構(gòu)示意圖Fig.1 Coordinate system of Ur

圖2 3-UrPS固定平臺(tái)Ur副的布置簡(jiǎn)圖Fig.2 Scheme of layout of Ur

圖3 動(dòng)平臺(tái)球角布置示意圖Fig.3 Scheme of layout of S
中間通過移動(dòng)副相連,構(gòu)成3-UrPS機(jī)構(gòu),該機(jī)構(gòu)的動(dòng)平臺(tái)作為步行器的腳,2個(gè)3-UrPS機(jī)構(gòu)的固定平臺(tái)通過連接件固連作為步行器腰部.如圖4所示為兩足步行器虛擬樣機(jī)模型,導(dǎo)入ADAMS中,加入約束以及與地面的接觸,建立虛擬樣機(jī)模型.
2 并聯(lián)腿機(jī)構(gòu)的位置反解
3-UrPS并聯(lián)機(jī)器人通過3條相同的UrPS支鏈鏈接動(dòng)、靜平臺(tái)(見圖5).每條支鏈通過Ur副與靜平臺(tái)相連,3個(gè)Ur副的回轉(zhuǎn)中心U1U2U3構(gòu)成等腰三角形(見圖2),每條支鏈通過S副與動(dòng)平臺(tái)相連,3個(gè)S副的轉(zhuǎn)動(dòng)中心S1S2S3也構(gòu)成1個(gè)等腰三角形(見圖3).需要指出的是固定平臺(tái)和動(dòng)平臺(tái)上的2個(gè)三角形并不相似,采用此種布置方式使機(jī)構(gòu)更具有一般性.將世界坐標(biāo)系O-XYZ建在靜平臺(tái)上,坐標(biāo)系原點(diǎn)O坐落在等腰三角形U1U2U3的中心,OX軸沿OU1方向,OZ軸垂直于靜平臺(tái)所在平面并指向上方.OY軸由右手螺旋定則確定.動(dòng)坐標(biāo)系o-xyz固連于動(dòng)平臺(tái)上,坐標(biāo)系原點(diǎn)o位于等腰三角形S1S2S3的中心,ox軸指向oS1方向,oz軸垂直于動(dòng)平臺(tái)所在平面并指向上方.oy軸由右手螺旋定則確定.機(jī)構(gòu)處于初始位姿時(shí),坐標(biāo)系oxyz與坐標(biāo)系O-XYZ的方向相同,如圖5所示.
動(dòng)平臺(tái)上的3個(gè)球副到動(dòng)坐標(biāo)系原點(diǎn)的距離分別為:l1,l2,l3,其中.靜平臺(tái)上的3個(gè)Ur副的轉(zhuǎn)動(dòng)中心到靜坐標(biāo)系原點(diǎn)的距離分別為:L1,L2,L3,其中L2=L3.OU2與oS2分別與OY軸、oY軸的夾角為φ和θ,且φ≠θ.如圖1和圖2所示η為Ur副的OuE和U2U3的夾角,3個(gè)Ur副姿態(tài)相同.為此,可以獲得上述6個(gè)運(yùn)動(dòng)副在動(dòng)、靜坐標(biāo)系下的坐標(biāo)分別為

動(dòng)作標(biāo)系o-xyz的原點(diǎn)在靜坐標(biāo)系下的坐標(biāo)為

動(dòng)作標(biāo)系相對(duì)于靜坐標(biāo)系的基于ZYX歐拉角的旋轉(zhuǎn)矩陣為

每條支鏈間S副和Ur副間的距離由P副的長(zhǎng)度確定,故關(guān)系為



圖4 步行器虛擬樣機(jī)模型Fig.4 Model of the biped robot

圖5 3-UrPS并聯(lián)機(jī)構(gòu)的坐標(biāo)系Fig.5 Coordinate system of 3-UrPS
當(dāng)動(dòng)平臺(tái)的位置和姿態(tài)參數(shù)均已知時(shí),可以根據(jù)式(5)計(jì)算出P副的長(zhǎng)度.另外,根據(jù)S副和Ur副坐標(biāo)的關(guān)系,可以計(jì)算出P副所在方向的向量,該向量也就是Ur副動(dòng)平臺(tái)的法線方向.當(dāng)計(jì)算Ur副中的主動(dòng)副的輸入角度時(shí),P副所在向量將被用到,其可通過式(6)計(jì)算

Ur并聯(lián)機(jī)構(gòu)是純轉(zhuǎn)動(dòng)機(jī)構(gòu),只有姿態(tài)的變化,沒有位置的變化.根據(jù)Ur機(jī)構(gòu)的特點(diǎn),如圖1所示,當(dāng)電機(jī)E轉(zhuǎn)過一個(gè)角度θ1時(shí),s1的向量為

如圖1所示,當(dāng)電機(jī)A轉(zhuǎn)過1個(gè)角度θ2時(shí),s2的向量為:

由Ur機(jī)構(gòu)的幾何結(jié)構(gòu)特點(diǎn),s3既垂直于s1也垂直于s2,所以的單位矢量,其中整理得

所以,用Ur副動(dòng)坐標(biāo)系的3個(gè)單位主矢量相對(duì)于Ur副定坐標(biāo)系的方向余弦組成的3×3矩陣為整理得



根據(jù)式(5)計(jì)算出移動(dòng)副的長(zhǎng)度,可以知道動(dòng)平臺(tái)上S副在固連于副動(dòng)平臺(tái)上的坐標(biāo)系下的坐標(biāo)為

那么,關(guān)系式(15)成立



可見,式(5)、式(17)是描述了3-UrPS的位置反解.
2 3-UrPS并聯(lián)腿的定姿態(tài)工作空間
假設(shè)該機(jī)構(gòu)的幾何參數(shù):初始位姿時(shí),動(dòng)作標(biāo)系相對(duì)于靜坐標(biāo)系的旋轉(zhuǎn)矩陣為單位陣、動(dòng)坐標(biāo)系原點(diǎn)在靜坐標(biāo)系中的坐標(biāo)為:其他參數(shù)為:
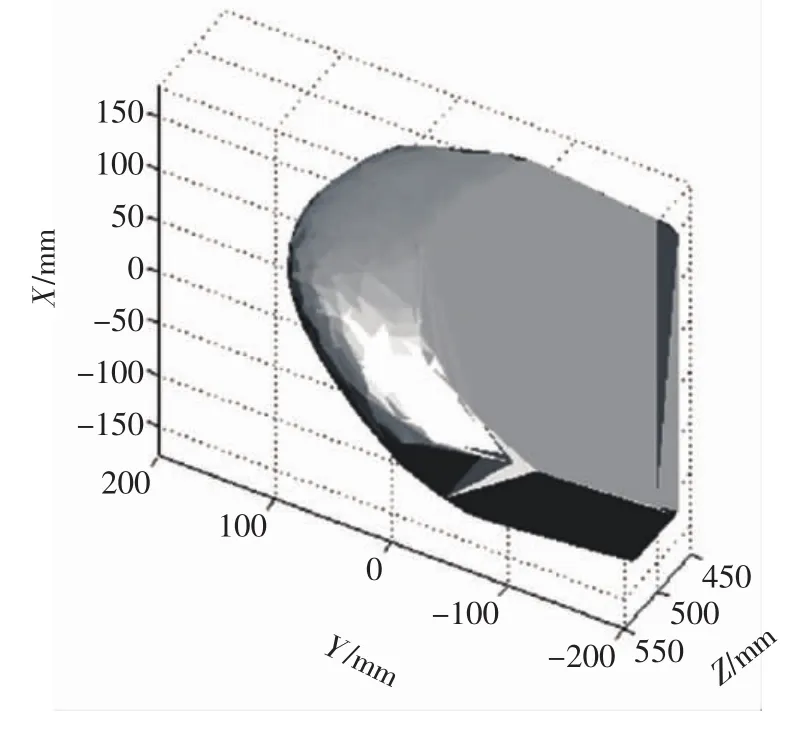
圖6 三維空間中的3-UrPS并聯(lián)機(jī)構(gòu)工作空間Fig.6 3D shape of workspace of 3-UrPS

圖7 x=-100時(shí)yz平面的工作空間形狀Fig.7 The shape in the plane yz and x=-100

圖8 x=-50時(shí)yz平面的工作空間形狀Fig.8 The shape in the plane yz and x=-50

圖9 x=0時(shí)yz平面的工作空間形狀Fig.9 The shape in the plane yz and x=0

圖10 x=50時(shí)yz平面的工作空間形狀Fig.10 The shape in the plane yz and x=50

圖11 x=100時(shí)yz平面的工作空間形狀Fig.11 The shape in the plane yz and x=100

圖12 x=150時(shí)yz平面的工作空間形狀Fig.12 The shape in the plane yz and x=150
從得到圖7至圖12的工作空間看,3-UrPS機(jī)構(gòu)尺寸并不大,工作空間為對(duì)稱圖形,而且該機(jī)構(gòu)的反解求解過程簡(jiǎn)單.僅從工作空間和控制的角度考慮,可以采用該機(jī)構(gòu)作為人形機(jī)器人的腿部機(jī)構(gòu).需要指出的是,在確定3-UrPS機(jī)構(gòu)工作空間時(shí),并未考慮球鉸的轉(zhuǎn)角范圍.
3 結(jié)論
1)3個(gè)并聯(lián)Ur機(jī)構(gòu)進(jìn)行等腰布置,建立了基于3-UrPS并聯(lián)腿的虛擬樣機(jī)模型;
2)分析了3-UrPS機(jī)構(gòu)的位置反解;
3)基于位置反解研究了給定姿態(tài)的工作空間,采用三維搜索法在MATLAB展示了三維工作空間的大小,給出了給定截面上二維形狀和大小.工作空間為對(duì)稱圖形,而且該機(jī)構(gòu)的反解求解過程簡(jiǎn)單.僅從工作空間和控制的角度考慮,可以采用該機(jī)構(gòu)作為人形機(jī)器人的腿部機(jī)構(gòu),為下一步的結(jié)構(gòu)設(shè)計(jì)及控制研究打下理論基礎(chǔ).
[1]Cafolla D,Wang M,Carbone G,et al.LARMbot:a new humanoid robot with parallel mechanisms[C]//ROMANSY 21-Robot Design,Dynamics and Control,2016.
[2]王洪波,齊政彥,胡正偉,等.并聯(lián)腿機(jī)構(gòu)在四足/兩足可重組步行機(jī)器人中的應(yīng)用[J].機(jī)械工程學(xué)報(bào),2009,45(8):24-30.
[3]溫月華.四足/兩足并聯(lián)腿步行機(jī)器人精度分析與優(yōu)化設(shè)計(jì)[D].秦皇島:燕山大學(xué),2015.
[4]王洪波,徐桂玲,胡星,等.四足并聯(lián)腿步行機(jī)器人動(dòng)力學(xué)[J].機(jī)械工程學(xué)報(bào),2012,48(23):76-82.
[5]桑凌峰,王洪波,孫利.載人步行椅機(jī)器人的自由度和腿機(jī)構(gòu)上平臺(tái)的布置方式分析[J].燕山大學(xué)學(xué)報(bào),2013(4):317-325.
[6]徐桂玲.助老助殘四足并聯(lián)腿步行機(jī)器人機(jī)構(gòu)設(shè)計(jì)與分析[D].秦皇島:燕山大學(xué),2010.
[7]王云.基于3-RPS四足并聯(lián)腿步行機(jī)器人的研究[D].秦皇島:燕山大學(xué),2014.
[8]武磊.基于三自由度并聯(lián)腿的仿生六足機(jī)器人的設(shè)計(jì)[D].秦皇島:燕山大學(xué),2012.
[9]榮譽(yù),金振林,崔冰艷.六足農(nóng)業(yè)機(jī)器人并聯(lián)腿構(gòu)型分析與結(jié)構(gòu)參數(shù)設(shè)計(jì)[J].農(nóng)業(yè)工程學(xué)報(bào),2012,28(15):9-14.
[10]范順成,韓書葵,谷慧茹.兩足步行機(jī)器人并聯(lián)腿機(jī)構(gòu)的穩(wěn)定性分析[J].河北工業(yè)大學(xué)學(xué)報(bào),2004,33(1):27-31.
[11]榮譽(yù),劉雙勇,韓勇,等.六足制孔機(jī)器人三自由度并聯(lián)機(jī)械腿的誤差模型及驗(yàn)證[J].農(nóng)業(yè)工程學(xué)報(bào),2016,32(15):18-25.
[12]Tao L,Ceccarelli M.Design and simulated characteristics of a new biped mechanism[J].Robotica,2014,33(7):1-21.
[13]Rodriguez Cianca D,Weckx M,Torricelli D,et al.A compliant 2-DoF ankle-foot system for a biologically inspired humanoid robot[C]//Ieee-Ras,International Conference on Humanoid Robots.IEEE,2015:264-269.
[責(zé)任編輯田豐 夏紅梅]
Workspace analysis of a biped mechanism
QI Kaicheng,ZHANG Jianjun,LIU Yuhong,SHANG Peng
(School of Mechanical Engineering,Hebei University of Technology,Tianjin 300130,China)
A parallel mechanism 3-UrPS is used to be the leg mechanism of a biped robot.The parallel mechanism Uris assigned with isosceles triangle in the modeling of 3-UrPS.The model of the biped robot is built in the research.The inverse kinematis of the parallel mechanism is analysed based on the invese positon solution,and the work space of fixed pose is researched.Then,the 3D shape is obtained in the Matlab used the three-dimensional optimization algorithm.The dimension and the shape are shown in the figures.The research in this paper is the basis of the control system of the biped robot.
3-UrPS;fixed pose;workspace;parallel mechanism;three-dimensional optimization algorithm
TH 112;TP 13
A
1007-2373(2017)02-0052-06
10.14081/j.cnki.hgdxb.2017.02.010
2017-01-06
河北省科技計(jì)劃(15211829);國家自然科學(xué)基金(15211829);天津市科技支撐計(jì)劃(14JCTPJC00532)
戚開誠(1975-),男,講師,博士,qkc@hebut.edu.cn.通訊作者:張建軍(1971-),男,教授,博士,zhjjun96@139.com.
