基于路徑跟蹤控制方法的拖掛式機器人系統路徑規劃算法
2017-06-27 08:10:42方曉波劉朕明孟德壯
計算機應用 2017年4期
方曉波,錢 宏,劉朕明,孟德壯
中國船舶及海洋工程設計研究院,上海 200011)(*通信作者電子郵箱xiaobofang@foxmail.com)
基于路徑跟蹤控制方法的拖掛式機器人系統路徑規劃算法
方曉波*,錢 宏,劉朕明,孟德壯
中國船舶及海洋工程設計研究院,上海 200011)(*通信作者電子郵箱xiaobofang@foxmail.com)
為解決拖掛式移動機器人系統路徑規劃算法精準性低、穩定性差和無法考慮系統間安全性等的問題,提出一種基于路徑跟蹤方法的路徑規劃算法。該算法融合快速拓展隨機樹(RRT)基本算法和路徑跟蹤控制方程,通過自動擬合樣條曲線,跟蹤并生成節點間軌跡,以此提高路徑精準性;加入系統夾角約束條件和節點擊中機制提高算法穩定性和結果安全性;此外,加入貪心優化算法,針對結果路徑進行優化處理。通過仿真實驗結果表明,相較基本RRT算法,改進算法搜索得到的路徑更貼近實際運動軌跡,在安全性和成功率上優于原算法,能夠滿足快速設計或實時系統的需求。
拖掛式系統;路徑規劃;路徑跟蹤; 快速拓展隨機樹;機器人
0 引言
拖掛式移動機器人(tractor-trailer mobile robots)是由機器人(牽引車)以鉸接等形式掛接若干拖車組合而成。這類機器人系統一般通過正、倒車和轉向驅動,帶動拖車完成指定運輸任務,通常被用于港口碼頭、自動化工廠、車站、酒店、核環境等場所,能代替人力執行一些危險或精度要求高的物資運輸工作。研究拖掛式機器人涉及的領域十分廣泛,包括運動學建模、運動規劃、路徑跟蹤、可控性分析等。與自由運動的單體機器人不同,拖掛式移動機器人系統是一個具有高復雜性和高綜合性的非完整、欠驅動、非線性系統,因此,一直是機器人領域研究的熱點和難點。
路徑跟蹤是通過設計合理的控制方法,實現機器人按照指定路徑完成行進動作。拖掛式機器人系統根據連接方式可分為離軸式和連軸式,根據運動特性又可分為正車和倒車,由于系統結構的復雜性,不同工況下系統的路徑跟蹤控制方法[1]都各不相同,尤其針對離軸式倒車系統,通常容易發生牽引車和拖車折疊、擠壓的現象。因此,控制方法的好壞將直接影響拖掛式移動機器人在跟蹤路徑上的安全性和穩定性。
路徑規劃是指機器人從所處的環境中自動搜索出一條從初始狀態到目標狀態的避碰、最優或次優路徑。通常選用的算法包括人工勢場(Artificial Potential Field)法、遺傳算法(Genetic Algorithm, GA)、蟻群優化(Ant Colony Optimization, ACO)算法[2]、模擬退火算法(Simulated Annealing, SA)、快速擴展隨機樹(Rapid-exploring Random Tree,RRT)算法等。鞏敦衛等[3]基于改進模擬退火算法,針對全局靜態移動機器人,通過引入脫障算子和一致尋優算子,提出提出了一種新的狀態產生方法,提高了尋優效率和全局尋優能力。劉傳領[4]基于勢場法和遺傳算法,針對單體移動機器人的路徑規劃算法,提出了一些改進的及新的解決方案,以提高算法的計算效率,擴展其使用范圍。杜明博等[5]針對車輛路徑規劃問題,基于快速擴展隨機樹算法,采用目標偏向采樣策略以及連續曲率后處理技術實現了車輛連續軌跡的生成,但降低了算法的穩定性和計算速度。
拖掛式移動機器人屬于多主體系統,在約束和控制方法上相對復雜,一般的單體無約束機器人的路徑規劃算法無法滿足實際需求。本文在基本RRT算法[6]中嵌入了該系統的路徑跟蹤控制技術,并加入了樣條曲線擬合、節點擊中機制、貪心(Greedy)優化[7]等算法,得到一種符合系統運動學特性的新型規劃算法。在此基礎上,通過VC++開發完成了可交互的拖掛式移動機器人路徑規劃軟件,驗證了算法的準確性和可靠性。
1 路徑跟蹤控制方法
1.1 運動學模型
根據帶一節拖車的拖掛式移動機器人系統,建立運動學模型,如圖1所示。
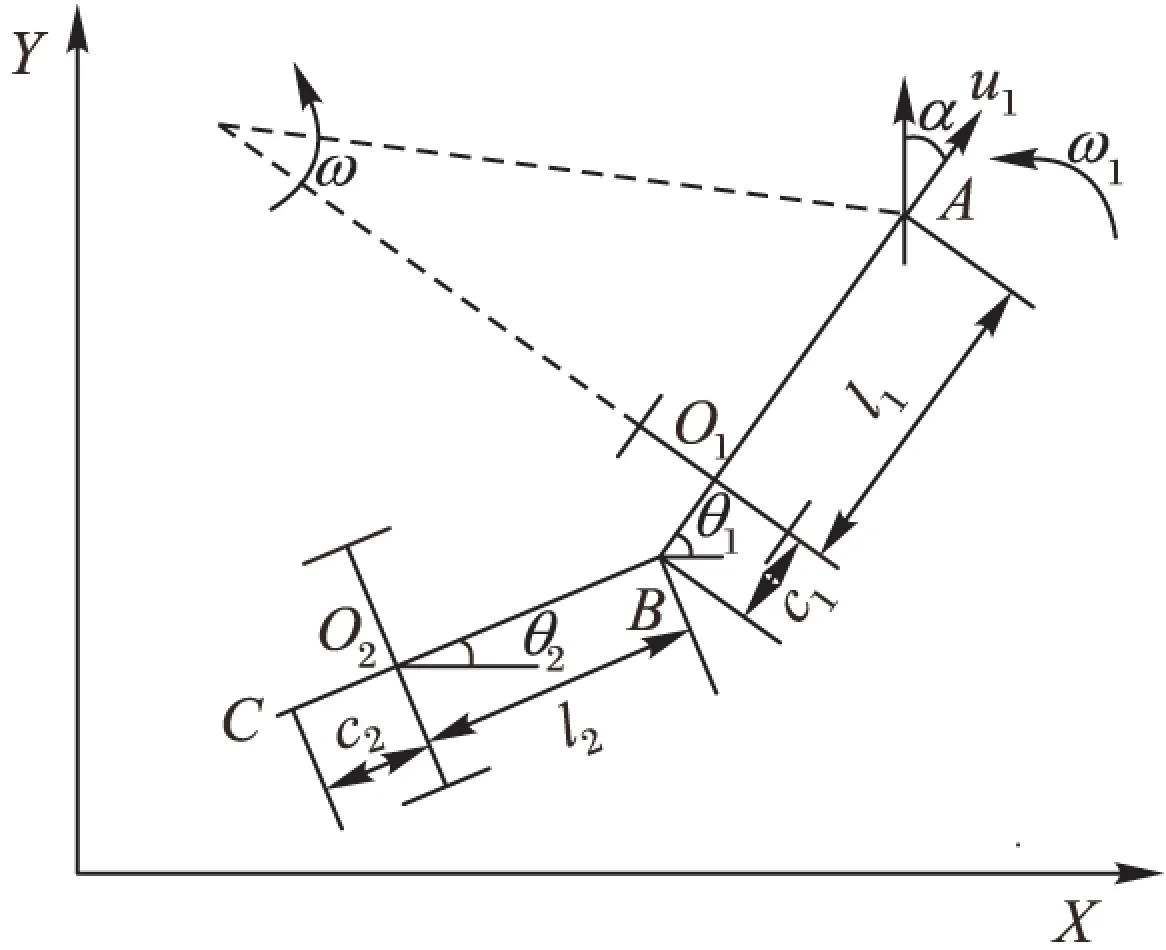
圖1 拖掛式移動機器人系統示意圖

(1)
根據拖車和牽引車的連接幾何關系可得:
(2)
1.2 路徑跟蹤控制方程
本文主要研究帶一節拖車的單體兩輪機器人系統模型。
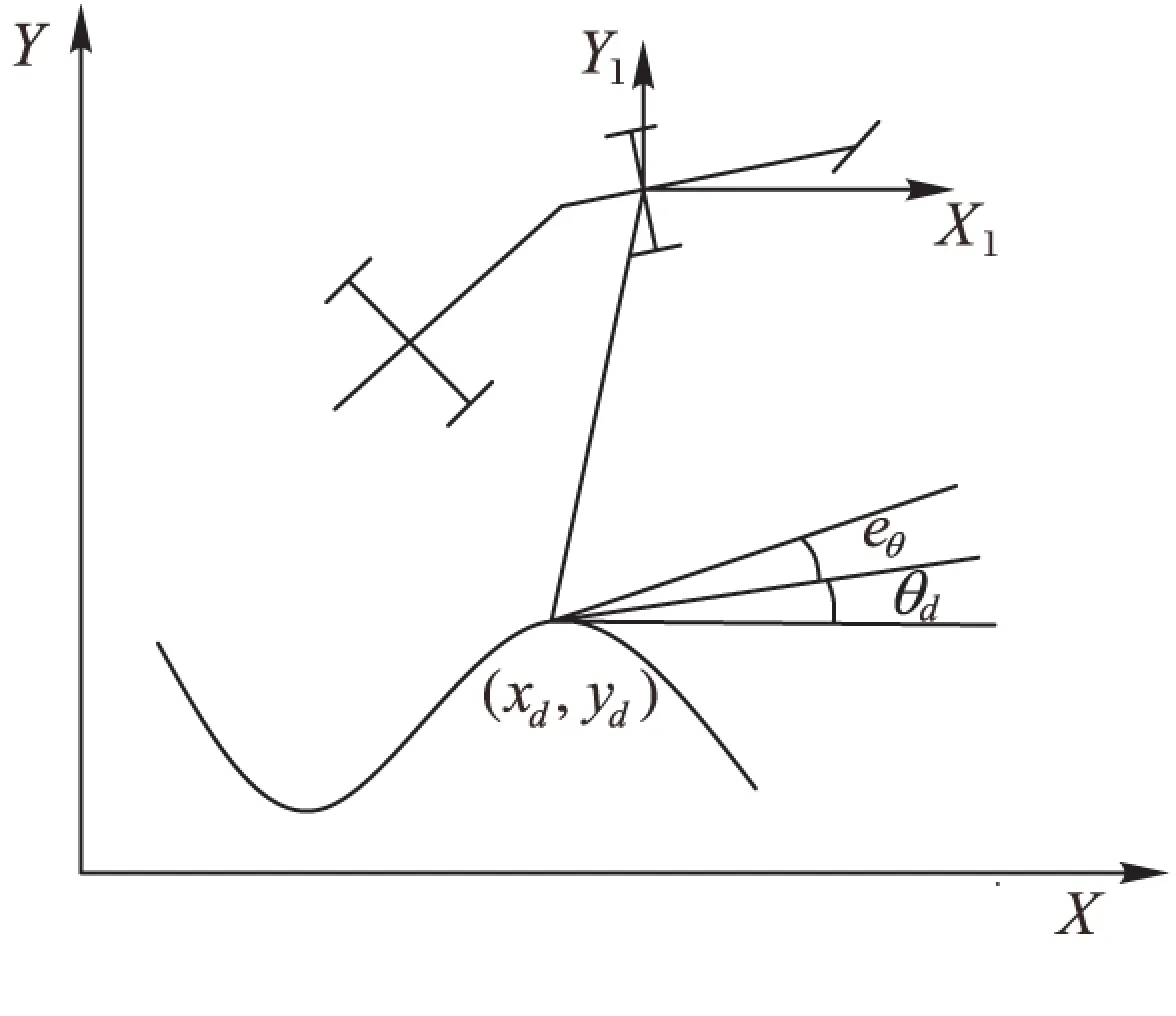
圖2 路徑跟蹤示意圖
1.2.1 離軸式和連軸式正車路徑跟蹤
根據系統連接方式的不同,拖掛式機器人系統可分為離軸式(c1>0)和連軸式(c1=0),兩種連接方式在正車驅動中的運動方程相同,故可用相同的控制方法進行路徑跟蹤。
根據文獻[8,10]可知:設期望路徑為ρd(xd,yd)、xd和yd三階可導且三階導數有界,期望路徑的曲率滿足kd≤1/r1min[9],若牽引車的控制率取為:
(3)
其中:u1、ω1為牽引車的線速度和角速度;系數k2,k3>0。期望線速度u1d、期望角速度ωd、誤差ex、ey、eθ滿足式(4):
(4)
則牽引車的運動將漸近收斂到期望路徑。
1.2.2 離軸式倒車系統路徑跟蹤控制方程
在實際使用情況中拖掛式機器人系統除了要向前正車完成路徑跟蹤外,還希望以向后倒車的方式沿著期望路徑將拖車控制到指定位置。若只改變u1d,沿用正車控制方程,將會出現拖車與牽引車擠壓、碰撞,甚至倒掛的現象。因此需要重新設計控制方法,將拖車和牽引車的夾角控制在合理的安全范圍內。
(5)
根據運動學方程可反推得到離軸式倒車系統的控制方程為:
(6)
1.2.3 連軸式倒車系統路徑跟蹤控制方程
對于連軸式系統,由于c1=0,運動學方程顯然已經不適用,根據模型可推得該系統下運動學方程為:
(7)
根據u2=u1cos (θ1-θ2),取控制率的u1為:
(8)
則
(9)

(10)
2 基于路徑跟蹤控制的改進RRT算法
2.1 基本RRT算法
RRT算法[11]是一種隨機釆樣的典型樹結構算法,采用特定的增量方式進行構造,其基本思想是由控制理論決定隨機樹的增長方式,通過在狀態空間隨機采樣狀態點將搜索導向空白區域,逐步縮短隨機狀態點與樹的期望節點即規劃目標點間的距離,從而找到一條連接起始點與目標點的規劃路徑。這種規劃方式拋棄狀態空間對障礙物精確定義的要求,選用碰撞檢測函數(Extend)來判定系統每個位形與障礙物的關系。這種方式可以簡化對空間的建模,搜索速度快,不會出現柵格法、人工勢場法等算法中易出現的維數災難問題。因此用于解決復雜環境下復雜系統的路徑規劃問題[12-13]。
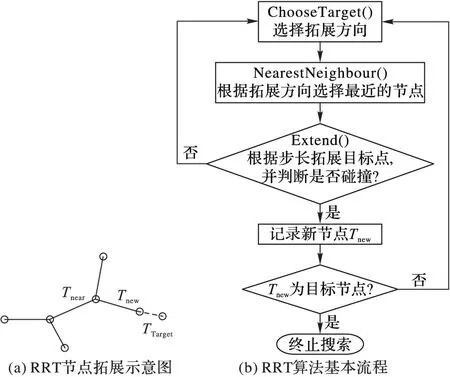
圖3 基本RRT算法
2.2 基于路徑跟蹤控制方法的改進RRT算法
2.2.1 嵌入路徑跟蹤控制方法
基本RRT算法在Extend中采用直線連接的方式拓展新節點,并根據該直線生成軌跡線進行碰撞檢測,此方法適用于無運動特性約束的單體機器人,可以提高路徑搜索速度。但在拖掛式移動機器人系統中,由于系統結構復雜,各個主體(牽引車和拖車)運動特性不同,采用直線擬合軌跡并進行碰撞檢測是不切實際的。
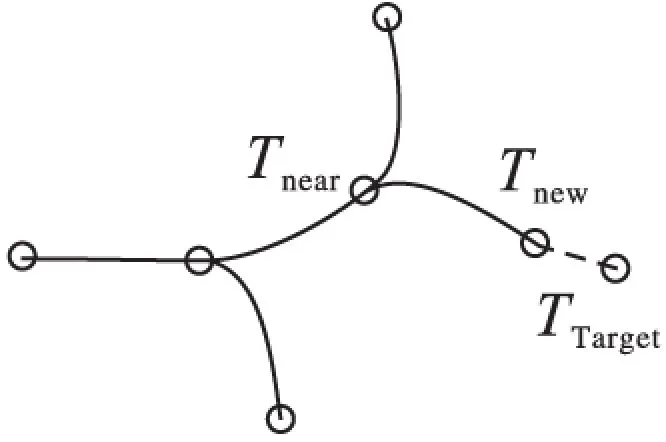
圖4 TTMT-RRT節點拓展示意圖
為了合理的將系統運動特性融合入RRT算法中,并生成合理的路徑軌跡,本文引入樣條擬合控制方法,如圖4所示,在節點拓展時,根據Tnear點拖車或牽引車的方位角信息與Tnew點的坐標值,進行兩點間的切向擬合,形成至Tnew的期望路徑,如圖5(a)所示。根據系統當前工況(正、倒車、離軸式、連軸式),選擇對應的控制方程(3)、(6)、(10),針對期望路徑進行路徑跟蹤,圖5(b)曲線分別為牽引車后輪、拖車后輪的中點的跟蹤軌跡線以及拖車的雙輪軌跡線。
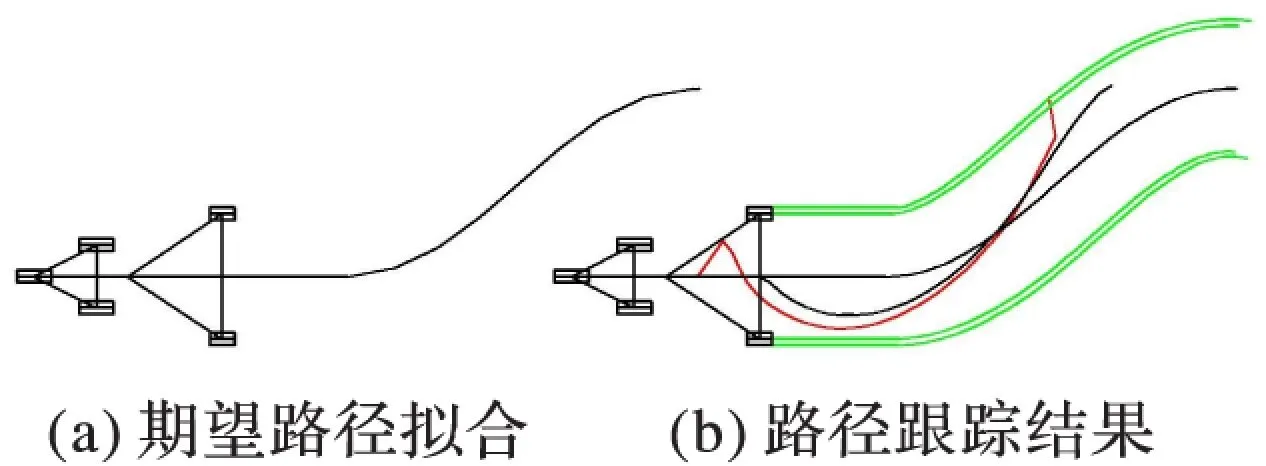
圖5 連軸式倒車系統的路徑跟蹤結果
2.2.2 節點擊中機制
牽引車和拖車之間由于幾何形狀的干涉約束,往往存在設計最大夾角,即牽引車與拖車縱向軸的最大夾角(約50°~90°)。為了在路徑規劃中考慮夾角安全性問題,避免倒掛、擠壓等問題的出現,算法添加了夾角約束檢測機制,針對跟蹤結果進行最大夾角約束檢測,若滿足安全閾值要求,則進一步進行碰撞檢測等;反之進行重新搜索。
由于在Extend()時加入了夾角約束條件,提高了節點拓展的難度,極易陷入某個局部最優的無限循環中,即節點樹中的某一節點Ti成為隨機選擇的高概率點,但由于離環境障礙物過近或者方位角過大,無法繼續拓展,則會造成算法搜索緩慢甚至搜索失敗。為了避免這種情況出現,就需要在擴展樹中刪除這種無效點Ti。本文采用節點擊中機制,記錄每次拓展所選擇的Tnear點以及其擊中次數,選擇合理的效率閾值(亦為節點最大子節點數),在擊中次數超出效率閾值的情況時,刪除Tnear點以及其子樹(子樹由于控制約束,一般無法繼承至Tnear的父項)。同時在每次一次拓展失敗時,嘗試將Tnear更改為其父節點進行重新拓展。經過測試,該拓展方法很好地解決局部最優問題,提高了算法穩定性。
2.2.3 基于貪心思想的結果優化算法
由于加入了路徑跟蹤控制方程,一般采用上述算法搜索得到的計算結果已經可以直接用于實際操作,屬于可行解,但不是最優解,需要對結果路徑進行進一步的優化。參考貪心思想,對節點樹主干節點進行優化,優化方法可分為正向優化與反向優化兩種,此系統采用正向優化方法。
Optimize(T:RRT Tree Points)
1)
Pruning(T);
2)
NewTOpt;
3)
TOpt.add (T0,S0);
4)
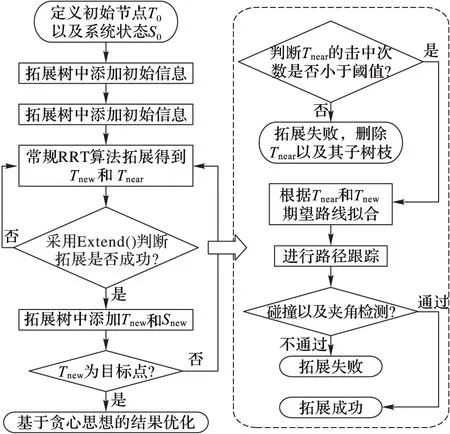
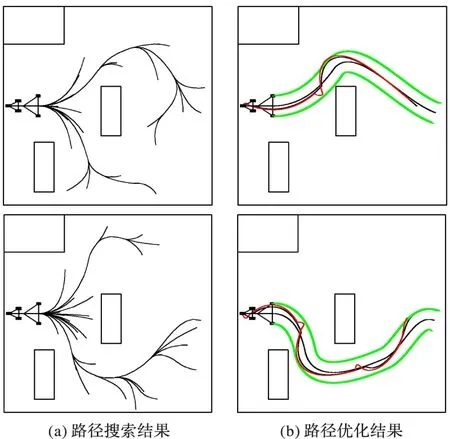
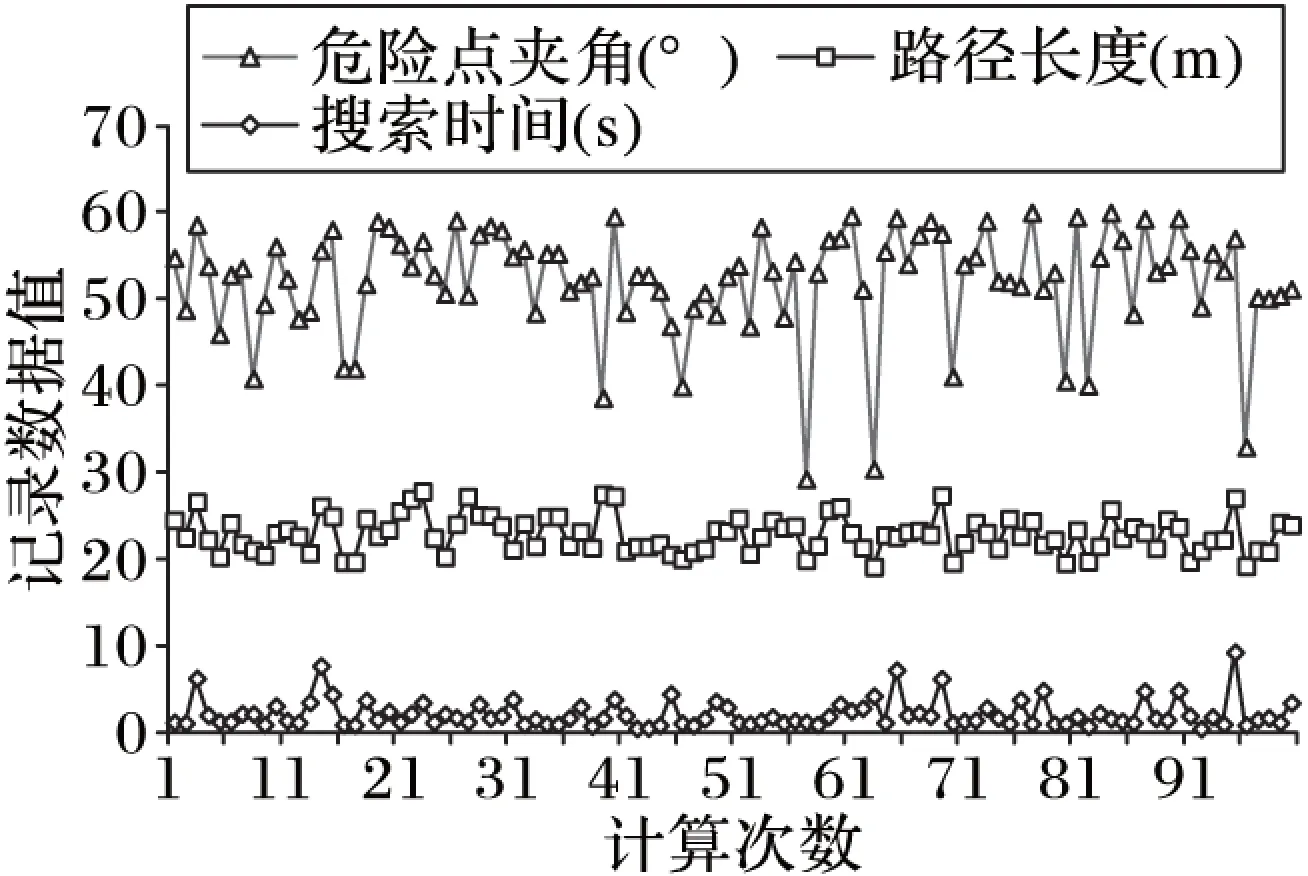
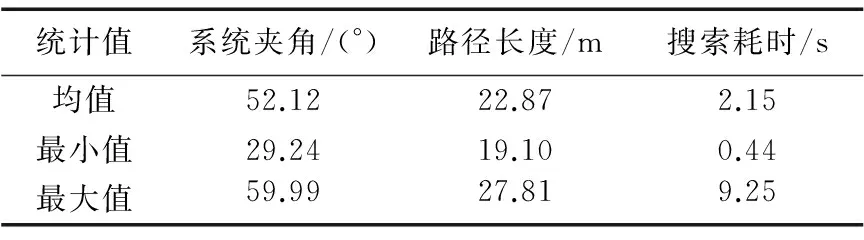
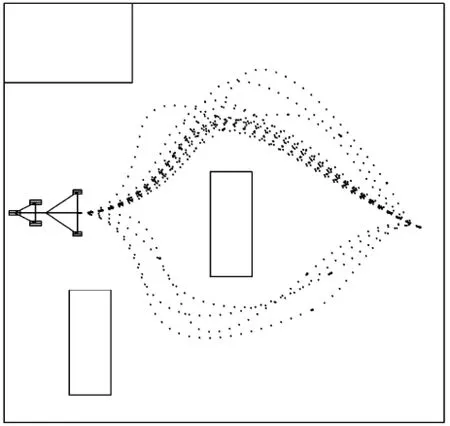
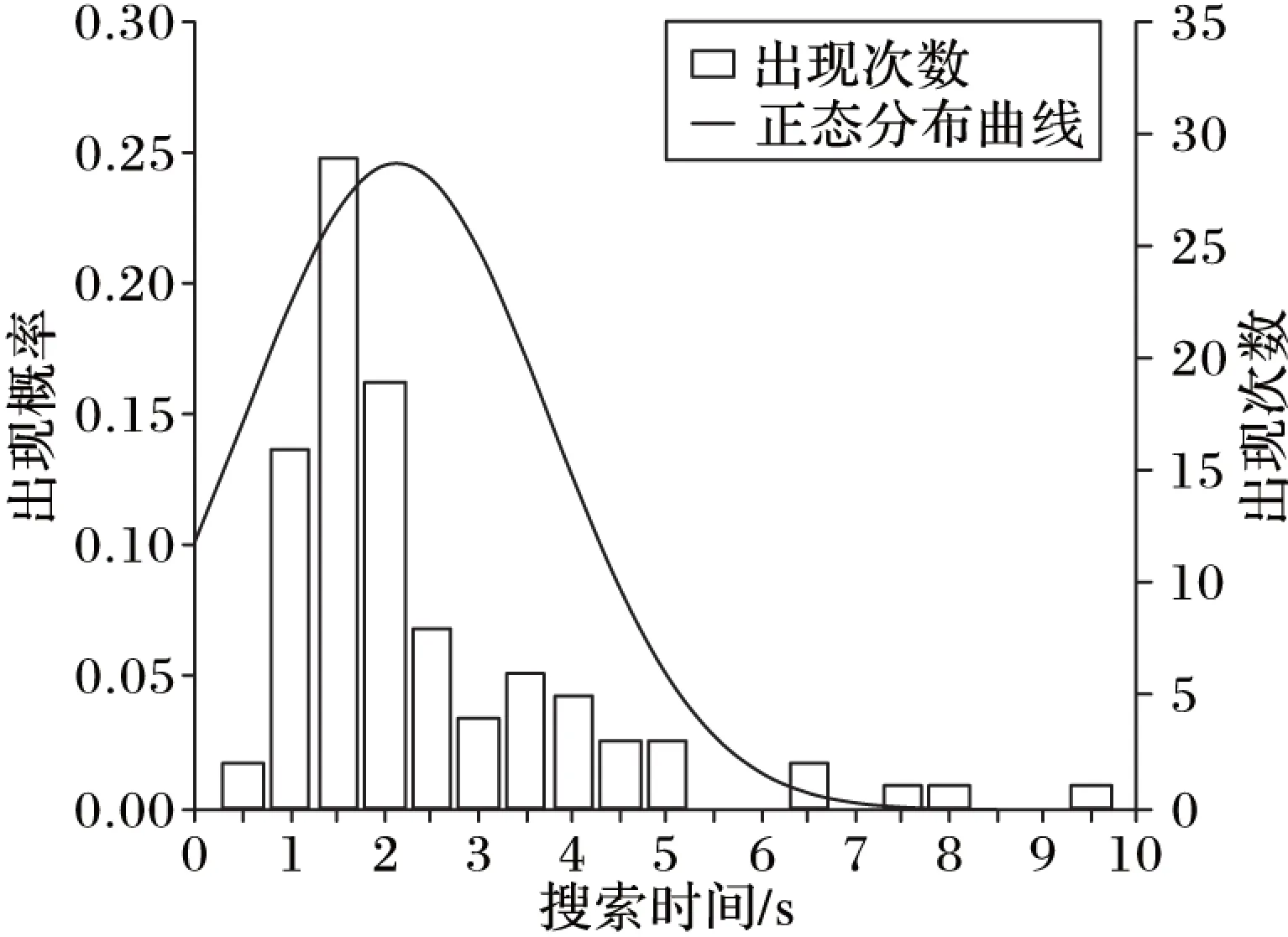
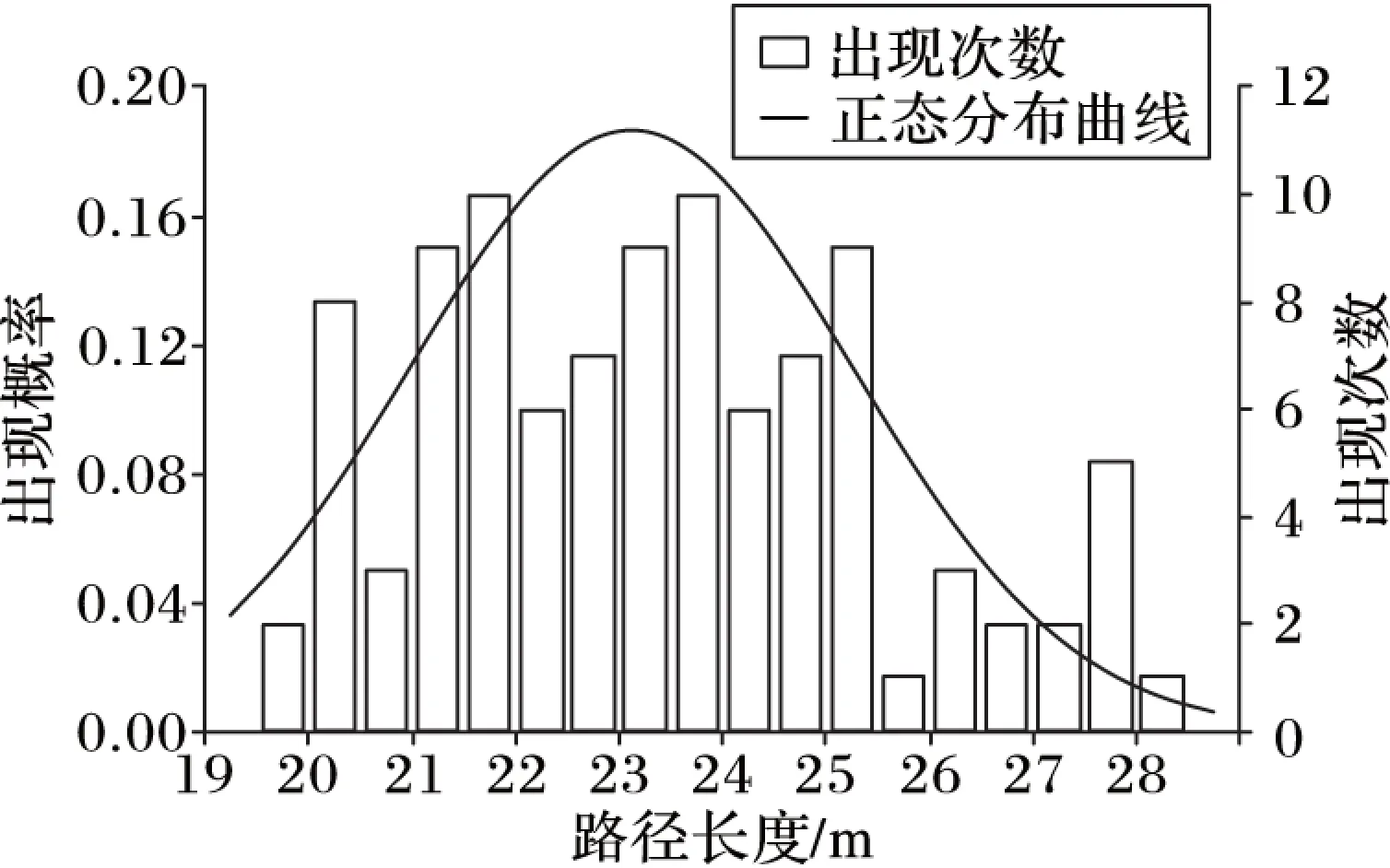
for (inti=0;i 5) for (j=T.st-1;j>I) 6) if (Extend (T,Tj,Ti,env)==TRUE) 7) TOpt.add (Tj);i=j;break; 8) elsej--; 9) end for 10) end for 上述算法中,步驟1)為對節點樹T進行剪枝處理,留下主干節點(T0,T1,…,Tn)。步驟2)~10)為從Ti點和該點系統狀態,依次嘗試連接拓展Tn,Tn-1,…,Ti+1,拓展方法Extend()參照TTMRPathPlanning算法,直至拓展成功,若Tj為Tn則結束優化。優化結果如圖6所示。 圖6 貪心思想優化算法示意圖 由貪心思想得到的Ti,由于改變了Ti點原有的系統狀態,無法保證Tn,Tn-1,…,Ti+1中存在成功拓展點,若沒有則需要進行退回處理,當Ti退回至T0時必有成功拓展點T1,因此,此優化算法是封閉有解的。 2.2.4 改進算法流程 圖7為基于路徑跟蹤的改進RRT算法流程。 圖7 基于路徑跟蹤的改進RRT算法流程 TTMRPathPlanning(env: environment,T: RRT Tree Points,Si:System state) 1) VarT0,S0; 2) T.add (T0,S0); 3) TTarget=ChooseTarget () 4) Tnear=NearestNeighbour (TTarget); 5) Tnew=Calulate (TTarget,Tnear,dl); 6) if(Extend (T,Tnew,Tnear,env)==TRUE) 7) T.add (Tnew,Snew) 8) if(Tnew==Tgoal) 9) Optimize(T) and return; Extend (T,Tnew,Tnear,env)代碼如下: 1) if (HitTimes (Tnear)>n) 2) T.delet (Tnear); 3) return FALSE; 4) else 5) if (PathTracking (Tnew,Tnear)==TRUE) 6) if (CollideTest (env)==FALSE) 7) return TRUE; 8) else return FALSE; 9) else return FALSE; 其中:第1)行中T0、S0為系統初始狀態,包括牽引車和拖車的初始位置和初始角度(x10,y10,z10),(x20,y20,z20),與常規RRT算法不同,TTMR-RRT每個節點記錄了系統6個自由度的狀態信息。第2)~8)行為基本RRT算法步驟,第9)行為對結果的貪心優化。Extend函數為改進的節點拓展方法,其中對所選擇的Tnear進行擊中次數檢測,超出設定的閾值則刪減樹中的Tnear點以及其子樹;否則,根據樣條曲線控制方法擬合期望路徑,計算該曲線的一至三階導數,并根據當前拖掛式系統的工況選擇合適的路徑跟蹤控制方程,進行路徑跟蹤(第5)行),跟蹤的結果滿足系統安全夾角要求dθmax=|θ1-θ2}<θrequire,則進行碰撞檢測,碰撞檢測算法一般采用二維面片干涉檢查算法,檢測通過則在樹上添加新節點。當Tnew為Tgoal,終止搜索,對搜索結果進行優化處理(見圖6),并根據優化結果進行重新擬合和跟蹤。 改進RRT算法可以使搜索結果滿足拖掛式移動機器人系統的運動學特性以及安全性要求,同時,能保證系統到達目標點的方位角滿足需求設定。當系統狀態為倒車時,可精準控制拖車到達目標點的朝向;當系統狀態為正車時,可控制牽引車到達目標點的朝向。 3.1 仿真初始信息與典型計算結果 根據上述路徑跟蹤控制方程以及改進RRT算法,搭建環境模型和系統模型結構,匯編成軟件,并進行實驗驗證。以連軸式倒車系統為例,實驗輸入數據包括起始點,起始點朝向A0=180°,目標點Tgoal(18,0),目標點朝向Agoal=160°,牽引車初始速度u0=-1,初始角速度ω0=0.6,系統安全夾角閾值為60°,搜索步長取為1.5 m,目標點隨機概率取30%,路徑跟蹤密度取1 000。典型路徑搜索結果如圖8所示。 根據當前系統輸入參數和環境模型,進行100次重復計算,統計結果路徑的路徑長度、搜索時間以及系統間最大夾角(見圖9)。 圖8 TTMR-RRT搜索結果 圖9 100次仿真計算結果信息 3.2 仿真結果分析 圖8(a)為TTMT-RRT搜索得到的節點樹狀圖,圖8(b)為剪枝以及優化之后的結果。路徑行進時間為20.736s,牽引車與拖車最大夾角為47.01°,滿足安全閾值60°的要求。由圖8所示,可行路徑主要分為上下兩種。 1)結果切實性。 由圖8可知,改進算法搜索得到的路徑軌跡為連續曲線,且區分拖車和牽引車各自的運動形態,存在一定的甩尾現象,相較原算法的線段式樹狀圖(圖3(a))更貼近實際情況,因此,碰撞檢測結果也更為準確。 2)結果穩定性和優化能力。 為了驗證改進算法的結果穩定性以及時效性,根據設定的環境和輸入信息,取20次計算結果中拖車雙輪中點的軌跡線,匯總成圖10。由圖10可知,由于設定的輸入信息中標定目標點朝向為160°(偏上),出現上路結果的概率明顯大于下路;其次,雖然算法具有一定隨機性,但經過后處理優化后,路徑結果基本趨向穩定。由此可知,相對于基本RRT算法,改進算法考慮了終點定位約束,在結果穩定性上明顯優于原算法;同時,解決了基本RRT算法存在的繞遠問題,在時效性上更勝一籌。 3)成功率和安全性。 根據100次仿真結果,將各結果中系統夾角、路徑長度和搜索時間匯總成表1,成功率為100%。 表1 100次仿真計算統計結果 由表1與成功率可知,相對于未添加節點擊中機制情況下的算法搜索成功率(56.5%),提高了43.5個百分點,可見算法解決了陷入局部最優問題,提高了搜索穩定性,在封閉性和收斂性上是相對成功的;同時,系統間最大夾角為59.99°,未超過設定的安全夾角閾值60°,因此,算法在結果安全性上也能夠予以保證。 圖10 拖車雙輪中點軌跡線20次計算結果匯總圖 4)結果時效性。 根據統計結果繪制正態分布曲線(圖11~12),其中,路徑搜索耗時的標準方差為1.62s,路徑長度的標準方差為2.13m。 圖11 搜索時間統計結果 圖12 路徑長度統計結果 由圖12可知,路徑長度分布較為平均,搜索結果處于在20~25m中較多,平均路徑長度為22.873m,最短路徑為19.097m,兩者相差16.51%,進一步驗證了改了算法在結果時效性上的提高。根據路徑長度正態分布曲線可知,平均只需搜索10次以內,即可得到最優路徑,結合搜索時間亦可確定此輸入狀態的系統,在搜索20s以內可以得到可行的最優路徑。 5)搜索快速性。 在搜索速度方面,基本RRT算法在環境變量一致的前提下,搜索平均耗時在0.78s,從統計結果來看,由于改進算法加入了路徑跟蹤計算以及夾角約束條件,犧牲了部分快速性。搜索以及結果優化的平均耗時為2.15s,由圖11可知,結果在2s以下的占66%,在1.5s以下的占47%,較原算法耗時增加2倍左右,該時間滿足快速設計的需求,但還不足夠用于實時系統,有一定改進空間。由于搜索耗時和環境復雜度、路徑長度、搜索步長、每步長跟蹤間隔、電腦性能都有密切關系,本結果中為了提高結果的精確度,設定每步長搜索間隔為1/1 000,若用于實時搜索,在滿足精度的前提下,可將間隔減低至1/300,經過驗證,搜索速度將以相同比例提升。 根據上訴仿真算例可知,TTMT-RRT算法在結果穩定性、切實性、成功率、時效性以及安全性上都優于原算法;反之,不可避免地在快速性上有所犧牲,在后續研究中需要進一步優化改進。 本文針對帶一節拖車的拖掛式移動機器人系統,提出了一種基于路徑跟蹤技術的自動路徑規劃算法。該算法融合RRT快速隨機數拓展算法,通過引入樣條曲線擬合方法和路徑跟蹤控制技術,提高了原算法的精準性;加入節點擊中機制和貪心優化算法優化了算法搜索成功率以及時效性。通過仿真實驗分析,進一步驗證了本文算法的正確性和可靠性。 由于加入了諸多約束和計算方程,算法在搜索耗時上高于基本RRT算法,犧牲了原有算法搜索速度快的優點,雖然速度可以通過降低搜索精度的方法予以提高,但治標不治本,如何在保證精度的前提下盡可能提高速度將是后續研究的重點。此外,本文研究的基本對象為帶一節拖車的拖掛式移動機器人系統,理論上可以通過改動路徑跟蹤控制方程拓展為多節拖車,在后續研究中,也將針對多節拖車系統進行進一步研究和驗證。 ) [1]MYOUNGKUKP,WOOLINC,MUNSANGK.Controlofamobilerobotwithpassivemultipletrailers[C]//Proceedingsofthe2004IEEEInternationalConferenceonRoboticsandAutomation.Piscataway,NJ:IEEE, 2004:4369-4374. [2] 王沛棟. 改進蟻群算法及在路徑規劃問題的應用研究[D]. 青島:中國海洋大學, 2012.(WANGPD.Researchonimprovedantcolonyalgorithmsandapplicationsforpathplanningproblems[D].Qingdao:OceanUniversityofChina, 2012.) [3] 鞏敦衛, 曾現峰, 張勇. 基于改進模擬退火算法的機器人全局路徑規劃[J]. 系統仿真學報, 2013, 25(3):480-483.(GONGDW,ZENGXF,ZHANGY.Globalpathplanningmethodofrobotbasedonmodifiedsimulatedannealingalgorithm[J].JournalofSystemSimulation, 2013, 25(3):480-483.) [4] 劉傳領. 基于勢場法和遺傳算法的機器人路徑規劃技術研究[D]. 南京:南京理工大學, 2012.(LIUCL.Researchesontechnologiesforrobotpathplanningbasedonartificialpotentialfieldandgeneticalgorithm[D].Nanjing:NanjingUniversityofScience&Technology, 2012.) [5] 杜明博, 梅濤, 陳佳佳, 等. 復雜環境下基于RRT的智能車輛運動規劃算法[J]. 機器人, 2015(4):443-450.(DUMB,MEID,CHENJJ,etal.RRT-basedmotionplanningalgorithmforintelligentvehicleincomplexenvironments[J].Robot, 2015(4):443-450.) [6]LAVALLESM.Rapidly-exploringrandomtrees:anewtoolforpathplanning[EB/OL]. [2016- 03- 01].http://msl.cs.illinois.edu/~lavalle/papers/Lav98c.pdf. [7] 馮林, 賈菁輝. 基于對比優化的RRT路徑規劃改進算法[J]. 計算機工程與應用, 2011, 47(3): 210-213.(FENGL,JIAJH.ImprovedalgorithmofRRTpathplanningbasedoncomparisonoptimization[J].ComputerEngineeringandApplications, 2011, 47(3):210-213.) [8] 苑晶, 黃亞樓, 孫鳳池. 兩種連接形式的拖掛式移動機器人路徑跟蹤控制[J]. 控制理論與應用, 2008, 25(3):398-406.(YUANJ,HUANGYL,SUNFC.Pathfollowingcontrolfortractor-trailermobilerobotswithtwokindsofconnectionforms[J].ControlTheory&Applications, 2008, 25(3):398-406.) [9] 徐國華. 帶拖車的輪式移動機器人系統的研究[D]. 天津: 南開大學, 1998.(XUGH.Researchesontractor-trailermobilerobotssystem[D].Tianjin:NankaiUniversity, 1998.) [10] 劉作軍, 孔鑫, 楊鵬, 等. 帶拖車移動機器人的運動學分析與仿真[C]// 中國控制與決策學術年會文集. 沈陽: 東北大學, 2007: 1309-1316.(LIUZJ,KONGX,YANGP,etal.Kinematicsanalyzeandsimulationfortractor-trailermobilerobot[C]//Proceedingsofthe2006ChineseControlandDecisionConference.Shengyang:NortheasternUniversity, 2007: 1309-1316.) [11]LAVALLESM,KUFFNERJJ.Randomizedkinodynamicplanning[J].InternationalJournalofRoboticsResearch, 1999, 20(5):473-479. [12] 徐娜, 陳雄, 孔慶生, 等.非完整約束下的機器人運動規劃算法[J]. 機器人, 2011, 33(6):666-672.(XUN,CHENX,KONGQS,etal.Motionplanningforrobotwithnonholonomicconstraints[J].Robot, 2011, 33(6):666-672.) [13]CHENGP,LAVALLESM.ReducingRRTmetricsensitivityformotionplanningwithdifferentialconstraints[EB/OL]. [2016- 03- 01].http://msl.cs.uiuc.edu/~pcheng1/papers/thesis.ps. ThisworkispartiallysupportedbytheFundforBasicResearchfromNationalScientificalandIndustrialTechnologyCommittee(A0720132001). FANG Xiaobo, born in 1992, M. S. candidate. His research interests include computer aided design of ships, computer simulation. QIAN Hong, born in 1966, M. S., research fellow. His research interests include computer aided design of ships, computer simulation. LIU Zhenming, born in 1988, M. S. candidate, engineer. His research interests include computer aided design of ships. MENG Dezhuang, born in 1989, M. S., engineer. His research interests include computer aided design of ships. Path planning algorithm of tractor-trailer mobile robots system based on path-following control method FANG Xiaobo*, QIAN Hong, LIU Zhenming, MENG Dezhuang (Marine Design & Research Institute of China, Shanghai 200011, China) Concerning the low accuracy, poor stability and security of the path planning algorithm of tractor-trailer mobile robots system, a path planning algorithm based on path-following method was proposed. On the basis of Rapid-exploring Random Tree (RRT) method and the equations of path-following, the path accuracy was improved by automatically fitting spline curve and tracking and generating the path between nodes; an angle constraint condition between systems and node hitting mechanism were added to the algorithm to improve the stability of algorithm and the security of results. In addition, an optimization algorithm based on greedy strategy was added to optimize results. The simulations results indicate that compared with the basic RRT algorithm, the path calculated by the improved algorithm is more close to the actual trajectory, and the success rate and security are better than the original algorithm, which can meet the requirement of quick design and real-time systems. trailer system; path-planning; path-following; Rapid-exploring Random Tree (RRT); robot 2016- 08- 09; 2016- 12- 27。 基金項目:國防基礎科研基金資助項目(A0720132001)。 方曉波(1992—),男,上海人,碩士研究生,主要研究方向:計算機船舶輔助設計、計算機仿真; 錢宏(1966—),男,上海人,研究員,碩士,主要研究方向:計算機船舶輔助設計、計算機仿真; 劉朕明(1988—),男,上海人,工程師,碩士研究生,主要研究方向:計算機船舶輔助設計; 孟德壯(1989—),男,河北邢臺人,工程師,碩士,主要研究方向:計算機船舶輔助設計。 1001- 9081(2017)04- 1116- 06 10.11772/j.issn.1001- 9081.2017.04.1116 TP24 A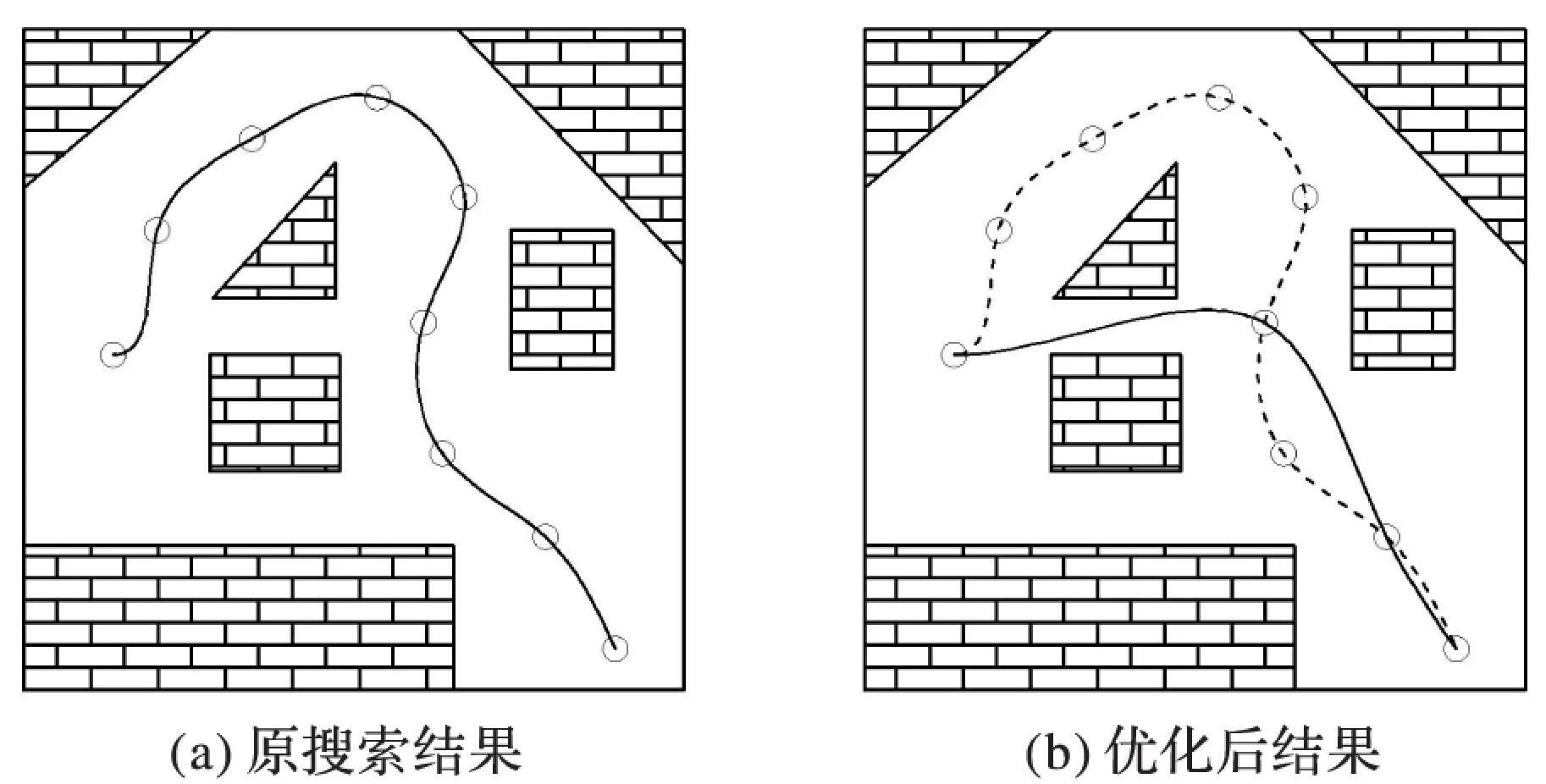
3 實驗與分析
4 結語
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
制造技術與機床(2017年3期)2017-06-23 08:11:21