后緣小翼智能旋翼有限偏角減振效果分析
2017-07-01 23:14:59劉士明楊衛東虞志浩董凌華陸凱華
振動、測試與診斷 2017年3期
劉士明, 楊衛東, 虞志浩, 董凌華, 陸凱華
(南京航空航天大學直升機旋翼動力學國家級重點實驗室 南京,210016)
?
后緣小翼智能旋翼有限偏角減振效果分析
劉士明, 楊衛東, 虞志浩, 董凌華, 陸凱華
(南京航空航天大學直升機旋翼動力學國家級重點實驗室 南京,210016)
建立了適合帶后緣小翼的縮比模型智能旋翼減振優化分析方法。考慮小翼運動引起的氣動力和慣性力對旋翼系統的影響,建立帶后緣小翼的旋翼氣動彈性分析模型,使用一種高效的代理模型方法計算帶后緣小翼的翼型氣動力。使用隱式梯形公式求解氣彈耦合動力學方程得到槳葉的彈性響應,采用力積分法計算槳葉剖面振動載荷與槳轂載荷。以小翼操縱輸入為設計變量,以槳轂載荷幅值為目標函數建立優化問題,使用最速下降法求解最佳減振效果對應的小翼偏轉規律。結果表明本模型計算的結構與氣動載荷可靠,對不同前進比狀態,后緣小翼都能有效降低槳轂垂向振動載荷。使用直接約束法和目標權重法都能模擬小翼偏轉能力不足的情況,小翼偏轉能力對減振效果有明顯影響,偏轉能力不足時后緣小翼仍具有一定的減振效果。
直升機; 旋翼; 振動; 后緣小翼; 優化方法
引 言
相比固定翼飛機而言,直升機前飛時旋翼的工作環境更加復雜,振動與噪聲問題嚴重。嚴格的振動標準(<0.05g)推進了直升機振動主動控制技術的發展,主動控制后緣小翼(actively controlled flap, 簡稱ACF)是一種重要的直升機振動主動控制方法[1]。ACF旋翼的每片槳葉外端后緣處安裝一片或若干片可偏轉的小翼,通過控制小翼合理地偏轉,產生附加的氣動力/力矩,影響旋翼的旋翼流場與氣彈響應,達到降低直升機振動水平或旋翼氣動噪聲的目的。相比其他主動控制方法,ACF具有控制需用功率小、可靠性高等優點。
國際上比較成功的全尺寸ACF旋翼試驗有SMART旋翼風洞試驗[2]、Sikorsky的ACF旋翼風洞試驗[3]和ADASYS智能旋翼飛行試驗[4]等。與全尺寸旋翼相比,開展縮比模型旋翼試驗代價相對較小,模型旋翼是驗證理論計算模型和主動控制算法至關重要的工具[5]。在試驗研究中ACF通常使用壓電材料或磁致伸縮材料等智能材料驅動裝置驅動后緣小翼[6],這些材料產生的力和位移十分有限,因而這些類型的驅動器產生的控制能力可能達不到最優減振控制的需求[7]。研究中還發現,氣動力引起的鉸鏈力矩也會明顯減小后緣小翼的偏角輸出[8]。對于縮比模型旋翼[9],槳葉內部空間更狹小,進行小翼驅動機構的結構設計時尤其困難,只能選用體積非常小的智能材料,此時,控制能力不足的現象會更明顯。在理論研究方面,文獻[10-11]分別建立了旋翼綜合分析模型,通過理論研究證明主動控制后緣小翼能有效控制旋翼振動載荷;然而國際上對驅動機構控制能力不足時后緣小翼的偏轉規律,以及此時后緣小翼的減振效果研究較少。進行有限偏角后緣小翼對旋翼的振動抑制分析有以下難點:高效可靠的帶小翼翼型氣動力計算方法;準確的后緣小翼智能旋翼氣動彈性分析模型;設計變量、目標函數、優化方法的選取;模擬小翼偏轉能力不足的方法。
筆者研究有限偏角的后緣小翼對智能旋翼的減振效果,建立后緣小翼智能旋翼氣動彈性分析模型,并構建優化問題確定最佳減振效果對應的小翼偏轉角,計算不同的前進比狀態以驗證方法的適用性,分析比較使用直接約束法和目標權重法兩種方法在模擬小翼偏轉能力不足時的減振效果。
1 智能旋翼氣動彈性模型
1.1 動能與應變能
研究對象為無鉸式旋翼,建模時無需考慮揮舞、擺振鉸自由度,變距軸承處剛體運動θ0由操縱給定。I為慣性坐標系,H為槳轂旋轉坐標系,B為槳葉變形前坐標系,E為變形后剖面坐標系。帶小翼的槳葉剖面如圖1所示。為描述小翼的運動,定義小翼坐標系C,C系原點位于小翼轉軸處,yC正方向朝小翼前緣,xC方向同xE,zC方向由右手定則確定。
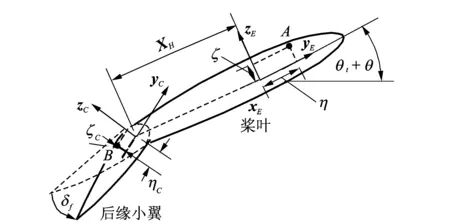
圖1 剖面坐標系Fig.1 Coordinate of blade section
槳葉上質點A經剛體運動和彈性變形后,在槳轂旋轉坐標系H中的坐標為
(1)

小翼的運動預先給定,不作為自由度,與槳葉上A點處于同一參考剖面上的小翼上任一點B在槳轂旋轉坐標系H中的變形后坐標為
(2)
其中:(ηc,ζc)T為B點在小翼坐標系中的坐標;XH為小翼偏轉軸到槳葉變距軸線的距離。
根據d′Alembert原理,以慣性力虛功的形式表示后緣小翼的動能變分
(3)
用相同方法得到槳葉的動能變分
(4)
基于幾何精確的大變形梁模型推導槳葉應變能[12],考慮預扭產生的坐標系基矢量的非正交性,采用有限變形的Green應變分析槳葉應變能。槳葉應變能表達式為
δUb=?(δεTQε)dAdx
(5)
1.2 后緣小翼旋翼氣動力模型
氣動力對槳葉做功由虛位移和外載荷點乘得到
(6)
其中:Gb為廣義力系數矩陣;Fa和Ma為變形后坐標系中的氣動力與氣動力矩;qb為廣義自由度;FA為氣動力虛功引起的廣義力。
為計算帶后緣小翼的翼型氣動力,筆者針對小翼偏轉后剖面的實際形狀劃分網格,使用計算流體力學(computational fluid dynamics,簡稱CFD)方法計算翼型氣動力,在氣彈耦合過程中使用徑向基函數作為CFD方法的代理模型以節約計算時間。詳細計算步驟如下。
1) 對Ma,α,δf這3個變量在計算域內使用拉丁超立方法生成n個樣本點。
2) 對樣本點依次計算小翼繞轉軸偏轉δf后的翼型表面形狀,翼型上點(x,y)T偏轉后為
(7)
其中:(xC,yC)為小翼轉軸位置。
劃分小翼偏轉后的翼型網格,使用CFD方法計算各樣本點的二維翼型氣動力,建立樣本點氣動力數據庫。
3) 構建如下徑向基函數[13]代理模型
(8)
其中:W為權重系數矩陣;φj為j點對各樣本點的基函數矢量;c為正實數;r為i和j兩點間歐氏距離。
由于氣動力對3個變量的敏感度不同,對3個變量添加權重k1,k2,k3建立r表達式

(9)
將n個樣本點的計算值代入式(10),確定權重系數矩陣
(10)
4) 對計算區間內任意未知點(Max,αx,δfx),使用代理模型計算其氣動力
(11)
計算旋翼氣動載荷時,槳盤平面誘導速度分布由黏性渦粒子法[14]得到,誘導速度為
(12)
其中:k為光滑參數;x為空間位置;K(ρ)為Biot-Savart核函數;α為渦粒子的渦矢量。
1.3 方程求解與載荷計算
在得到槳葉與小翼的應變能與動能變分、外力虛功后,依據Hamilton原理建立槳葉非線性動力學微分方程
(δTf+δTb-δUb+δWa)dt=0
(13)
由于高頻彈性扭轉及離心力的作用,旋翼動力學微分方程通常是剛性的,筆者采用隱式梯形公式與牛頓迭代算法在位形空間中求解方程[15]。使用力積分法計算槳葉結構載荷,從待求載荷的徑向位置到槳尖的剖面載荷積分得到參考點處的結構載荷。由各片槳葉的槳根載荷FRk計算槳轂載荷FH
(14)
其中:Nb為槳葉片數。
帶預錐角βp的旋翼,不同槳葉方位角處的坐標變換矩陣為
(15)
2 小翼操縱優化
使用2Ω~5Ω(Ω為旋翼轉速)的小翼操縱用于振動控制,操縱向量δf由2Ω~5Ω小翼轉角傅里葉級數這8個設計變量構成
δf=[δ2c,δ2s,δ3c,δ3s,δ4c,δ4s,δ5c,δ5s]T
(16)
一個周期內的小翼偏角表示為
(17)
對4片槳葉旋翼而言,4Ω的槳轂載荷是機身的主要振源,研究后緣小翼振動主動控制效果時,以4Ω槳轂振動的幅值建立振動目標函數Jv

(18)
研究希望最大程度地減小Jv,但是由于小翼的結構和小翼驅動機構的功率等約束,后緣小翼在工作時可能遇到偏轉能力不足的情況。為模擬偏轉能力不足時的小翼減振效果,介紹兩種研究方法。
1) 直接約束法。直接限制小翼偏角上限δmax,在數值上對小翼偏角進行如下處理
(19)
直接約束法求解時以Jv為目標函數。
2) 目標權重法。考慮振動水平的同時,在目標函數中考慮小翼偏轉角的影響。定義小翼操縱目標函數Jf為
(20)
以振動目標函數和小翼操縱目標函數加權求和的形式建立目標權重法中優化問題的最終目標函數
J=(1-wf)Jv+wfJf
(21)
其中:wf為小翼操縱目標函數權重,通過調整權重的大小能夠調節偏角限制的程度。
使用最速下降法可求解優化問題,確定目標函數最小值對應的小翼操縱,步驟如下。
1) 給定第k步時小翼操縱,由有限差分法得到小翼操縱δf的目標函數梯度
Jk(δf)=(,,…,,)
(22)
2) 根據梯度的物理意義,沿梯度的反方向標量場下降最快,確定第k+1步小翼操縱的變化方向
(23)
3) 使用一維尋優法確定第k+1步的小翼操縱,要求最優步長tk滿足

(24)
4) 重復步驟1~3,直到滿足收斂條件‖J‖<εres時,停止迭代,εres為給定小量。
3 計算模型驗證
3.1 帶后緣小翼翼型氣動力驗證
以帶0.2C后緣小翼的NACA0012翼型風洞試驗結果和非定常理論計算結果[16]驗證所建立的帶小翼翼型氣動力模型,翼型弦長C=0.18 m,Ma=0.4。基礎翼型與后緣小翼的周期運動規律為
(25)
圖2對升力系數和力矩系數進行了比較,可以看出本研究計算結果和文獻中理論計算結果與非定常風洞試驗結果吻合的都很好,證明建立的代理模型氣動力計算方法可靠,可用于氣動彈性計算。
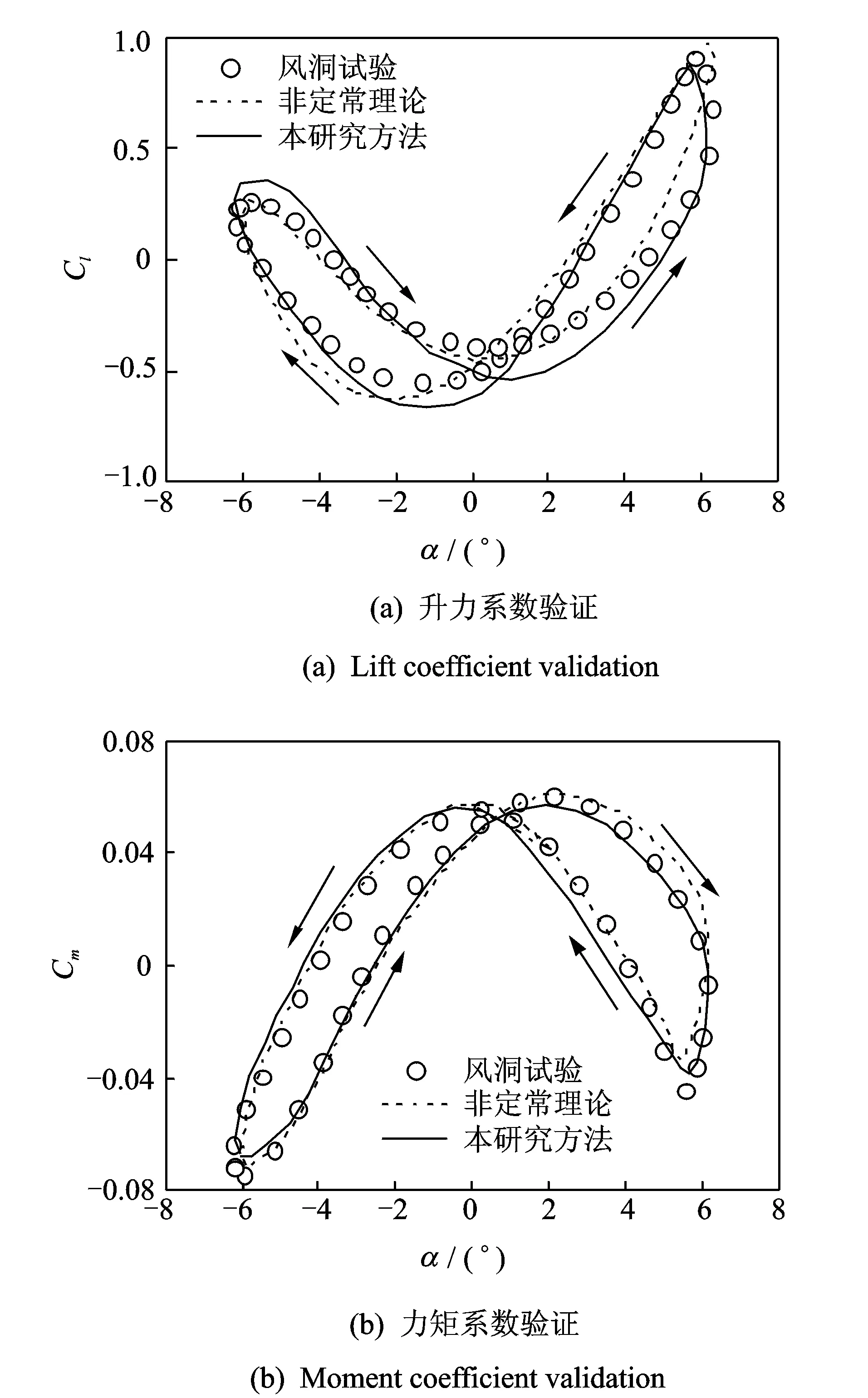
圖2 翼型氣動力模型驗證Fig.2 Validation of airfoil aerodynamic model
3.2 結構載荷驗證
以全尺寸的無鉸式BO105旋翼的風洞試驗結果和旋翼綜合分析軟件CAMRAD計算結果[17]驗證本旋翼模型計算結構載荷的能力。計算狀態為μ=0.197,αs=-4.8°,CT/σ=0.071。從圖3可以看出,本研究建立的計算模型能夠很好地預測槳葉中段與根部的揮舞彎矩,總體上精度優于使用自由尾跡/準定常氣動模型計算的CAMRAD/JA。0.144R處于150°方位角附近的揮舞彎矩預測結果比CAMRAD/JA更接近試驗值(見圖3(a)),很好地捕捉到了0.57R處旋翼后行邊揮舞彎矩的變化情況(見圖3(b))。

圖3 旋翼載荷驗證Fig.3 Validation of rotor load
3.3 氣動載荷驗證
SMART旋翼試驗是目前最成功的帶小翼全尺寸旋翼風洞試驗,文獻[18]使用兩種方法對該旋翼進行了分析,即Freewake/ UMARC耦合計算方法和CFD/ UMARC耦合計算方法,計算文獻[18]的case2狀態。考慮到小翼偏轉對剖面氣動力矩的影響比對升力系數和阻力系數的影響更顯著,俯仰力矩更難預估,比較小翼內端0.74R與小翼中部0.82R兩個剖面處的俯仰力矩,驗證本方法計算帶小翼旋翼氣動載荷的能力。從圖4可以看出,3種計算方法得到的俯仰力矩系數結果接近,證明了筆者建立的氣動模型的準確性,可用于帶后緣小翼的旋翼載荷計算。
4 數值計算與討論
研究半徑為1.143 m的4片槳葉的模型旋翼,其弦長為0.086 m,無尖削,無預扭,工作轉速為760 r/min,翼型為NACA0012,槳葉結構參數見表1,其中1號段為柔性段,4號段為小翼段。小翼尺寸及位置見圖5。
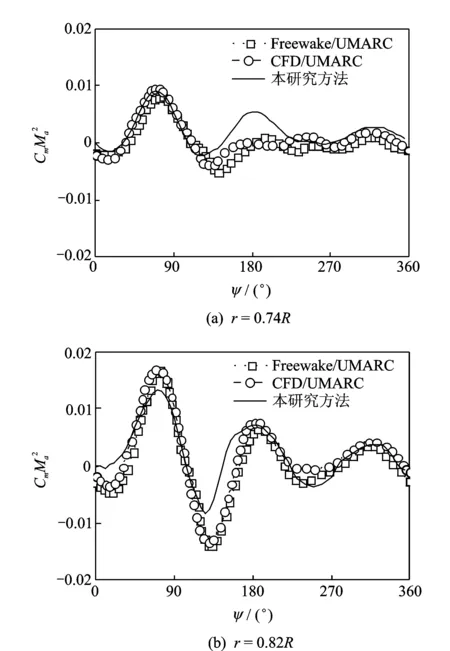
圖4 帶后緣小翼槳葉剖面俯仰力矩比較Fig.4 Pitch moment of blade section with ACF
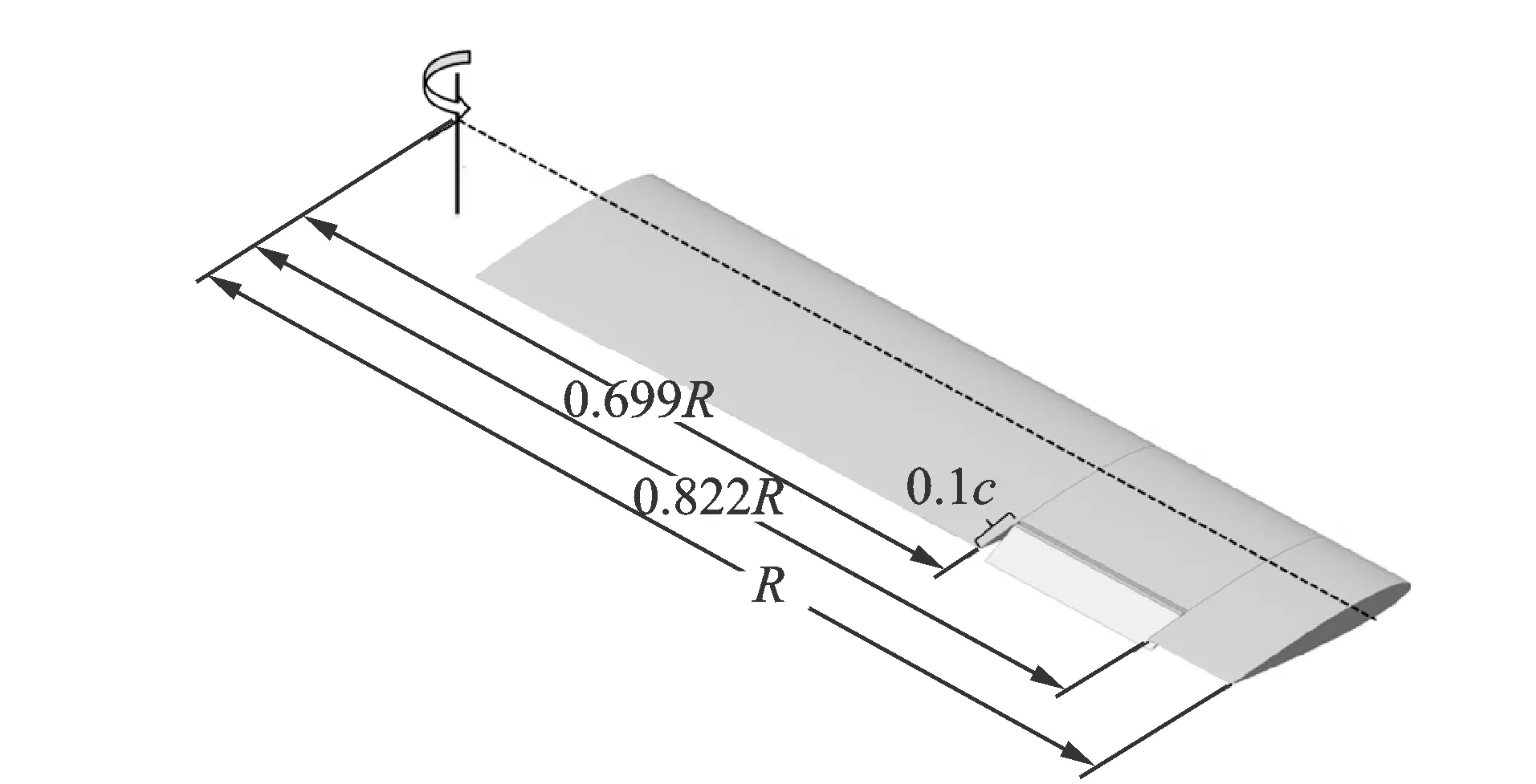
圖5 后緣小翼位置與尺寸Fig.5 Position and dimension of ACF
4.1 自由小翼減振分析
對小翼的偏角幅值不做任何約束,小翼操縱目標函數權重wf取0,計算4個前進比狀態(μ=0.1,
0.15, 0.2, 0.25),拉力系數為0.005,旋翼軸前傾角為0°,配平使槳根1階揮舞彎矩分量為0,忽略小翼偏轉對旋翼配平的影響。
圖6對不同前進比狀態的小翼靜止及小翼受控優化時的4Ω槳轂垂向載荷進行了比較,可以看出,前進比越大,小翼靜止時的垂向槳轂振動載荷越大。對于不同的前飛速度,通過優化小翼控制的方法都能有效降低4Ω槳轂垂向載荷。
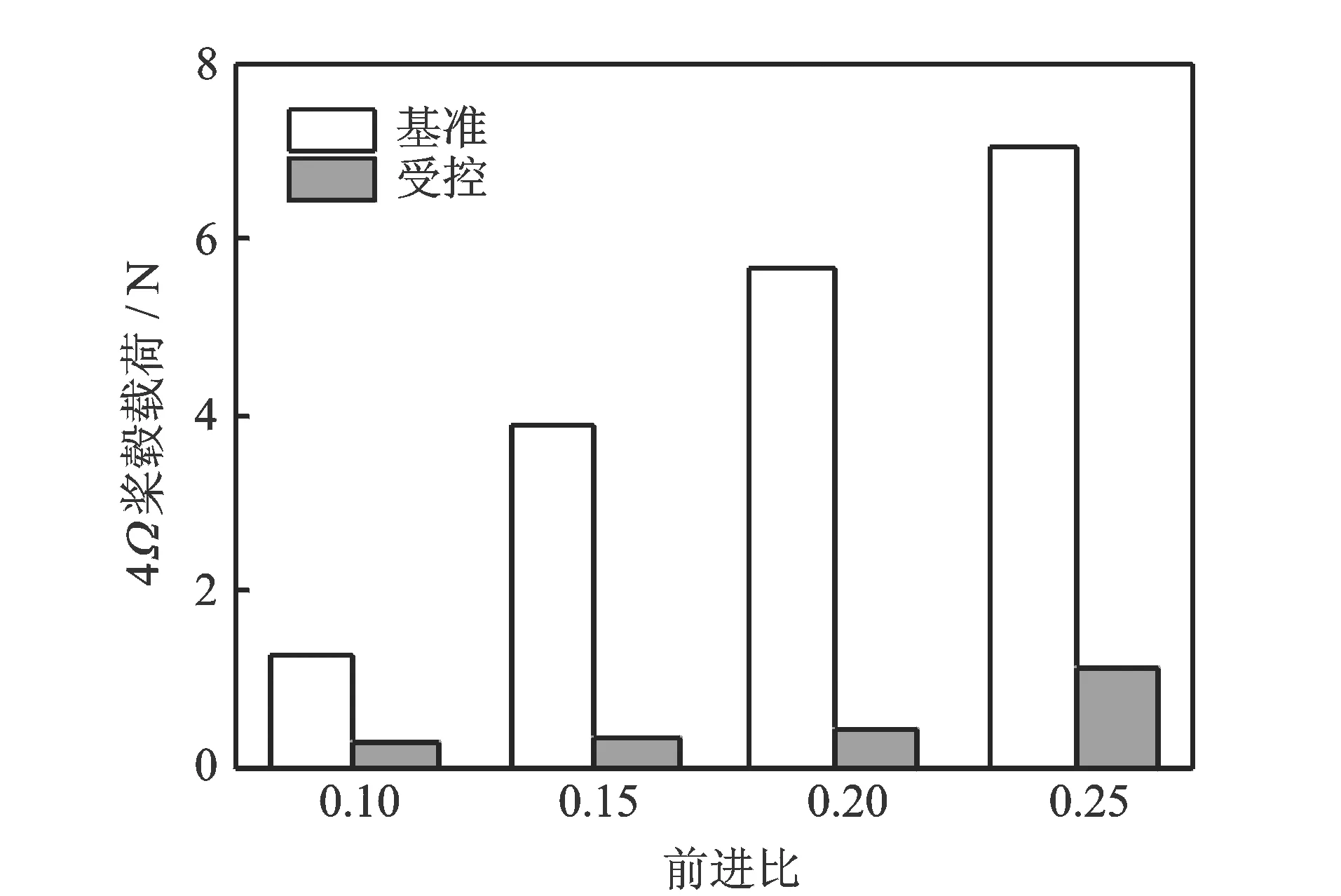
圖6 4 Ω槳轂垂向載荷控制效果Fig.6 Control effect of 4 Ω vertical hub load
前進比越大,槳轂振動載荷越大,需要小翼產生更大的氣動力用于抑制振動載荷,因此減振需要的小翼偏轉幅值越大。不同前進比狀態優化得到的小翼偏轉規律如圖7所示。幾個計算狀態的小翼在旋翼前行邊的偏轉幅度普遍大于后行邊的偏轉幅度,且前行邊的偏轉規律在相位上具有相似性。
對μ=0.2狀態,振動目標函數Jv由6.31降至2.74,下降了56.6%。圖8對此前進比小翼受控前后的槳根處垂向剪力和扭轉力矩的諧波幅值進行了比較。本研究計算非均勻誘導速度分布時使用的黏性渦粒子法能夠捕捉到氣動載荷的高階成分,槳葉在高階的氣動載荷作用下于根部形成高階的結構載荷。垂向剪切力中的3,4,5階諧波傳到槳轂上,形成4Ω的垂向槳轂振動載荷,這是垂向槳轂振動的主要來源。從圖8(b)可見,扭轉力矩諧波中1階幅值最明顯,這是前飛狀態周期變距操縱產生的。小翼不工作時除1階以外其他階次的幅值均非常小,小翼向下偏轉時改變了原有翼型的彎度,在翼型后緣下表面形成明顯的高壓區,將顯著改變翼型的俯仰力矩系數,由于2Ω~5Ω的小翼運動,明顯增加了2~5階扭轉彎矩幅值。

表1 模型旋翼結構參數

圖7 不同前進比小翼控制規律Fig.7 ACF control law of different advance ratio
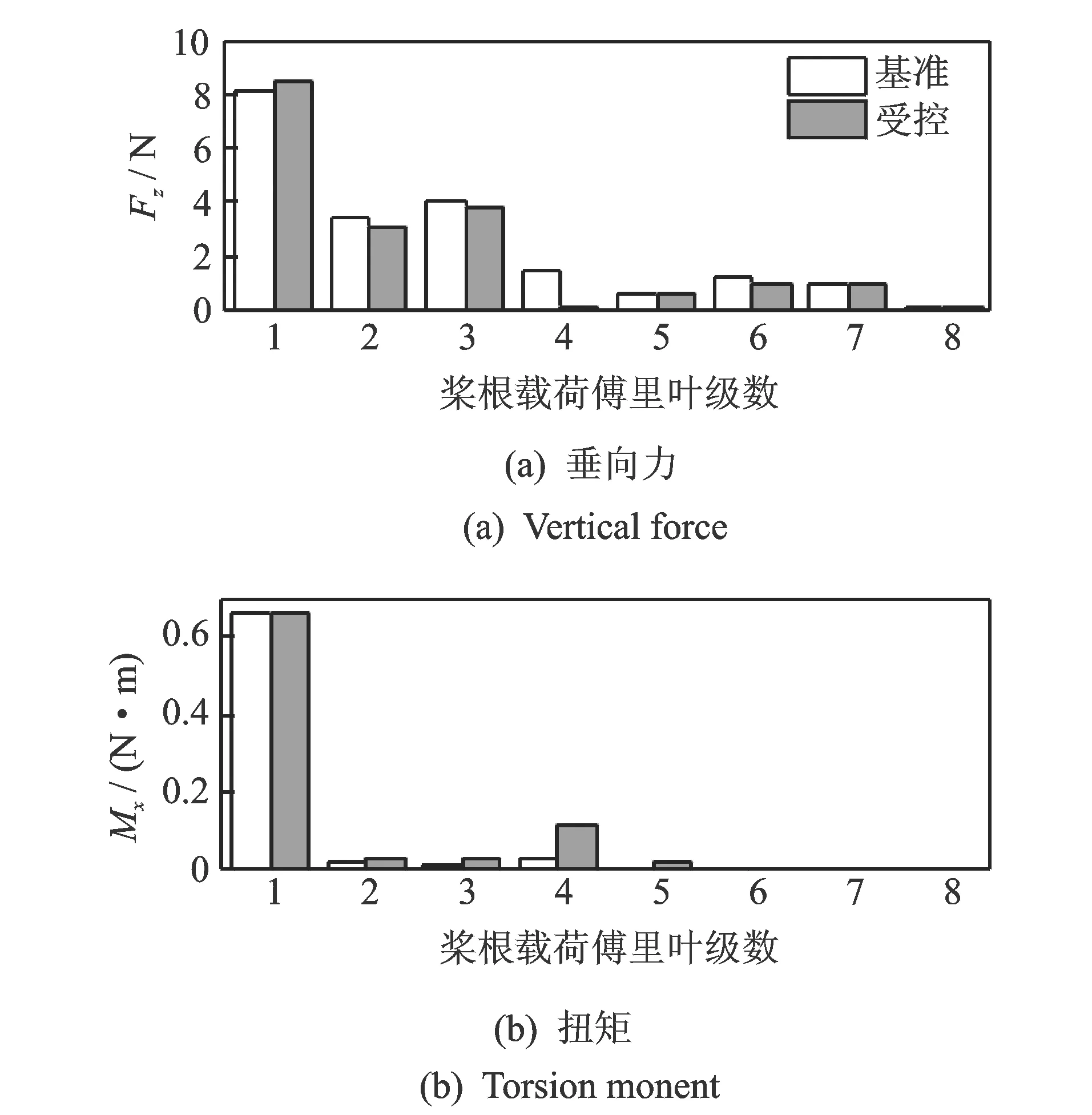
圖8 槳根載荷諧波幅值(μ=0.2) Fig.8 Amplitude of load harmonics at blade root(μ=0.2)
通過優化小翼偏轉規律,槳根垂向力的4階諧波基本降為0,其他階次的幅值和相位也都有所變化,合成后的垂向槳轂振動載荷明顯降低,如圖9所示。小翼偏轉輸入僅包含2Ω~5Ω,對更高階的振動影響不明顯。從圖9可以看出,減振后的垂向槳轂力仍保留明顯的8階成分。
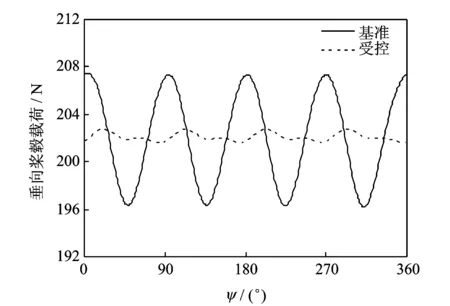
圖9 垂向槳轂振動載荷(μ=0.2)Fig.9 Vertical vibratory hub load(μ=0.2)
4.2 直接約束法
設計的模型旋翼后緣小翼驅動機構使用3個串聯的PTJ200系列壓電堆驅動菱形框帶動小翼偏轉,使用ANSYS分析驅動機構在交變的額定電壓(200 V)作用下的工作能力。計算得到不同頻率電壓作用下的小翼偏轉能力如表2所示,無氣動力作用時設計的驅動機構在小翼工作頻率附近的偏轉能力約為±3°,實際工作時由于氣動力的作用,偏轉幅值會更小。

表2 小翼偏角幅值
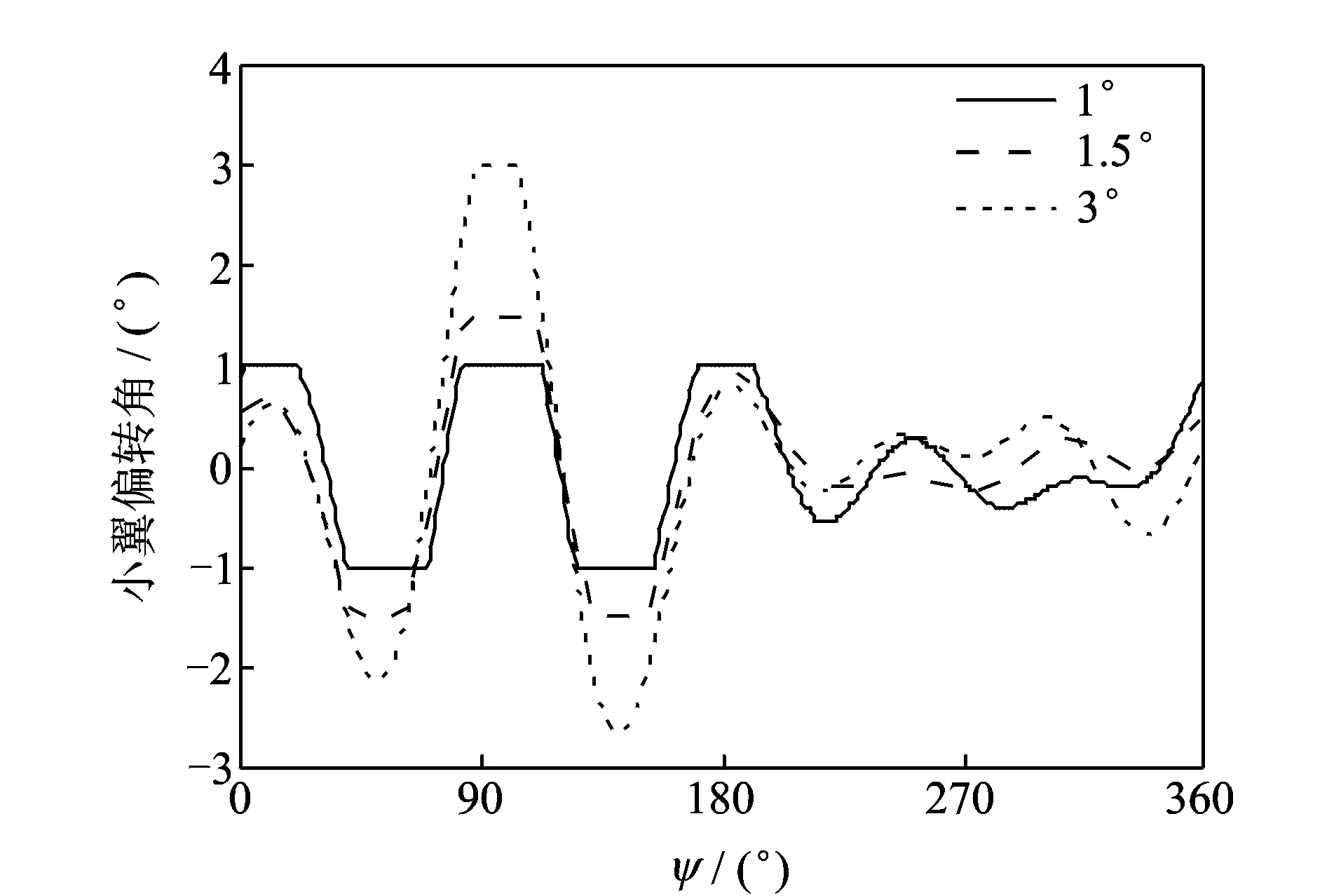
圖10 直接約束法小翼偏轉角Fig.10 Deflection angle with direct constraint method
針對設計的小翼驅動機構驅動能力,使用直接約束法(wf=0)分析有限偏角小翼的減振效果,分別對δmax=1°,1.5°,3°這3種情況進行分析,計算得到的最優小翼偏轉角如圖10所示。可以看出,不同的偏角上限對小翼控制律的相位影響較小,對幅值影響較大。±3°的限制幾乎沒有影響到小翼的自由偏轉,此時4Ω槳轂垂向振動載荷降低了92.4%,減振效果十分明顯。當小翼僅在±1°的范圍內偏轉時,最優狀態能降低71.2%的4Ω槳轂垂向振動載荷。
比較圖11中不同方向的槳轂載荷可以發現,后緣小翼智能旋翼對垂向槳轂振動載荷影響最明顯,由于各自由度之間的耦合作用,垂向槳轂振動降低的同時其他方向的載荷也有所變化。雖然小翼運動使槳根扭轉振動載荷大幅增加,如圖8(b)所示,但是其數值與槳根揮舞彎矩相比太小,所以在合成為槳轂俯仰和滾轉力矩后體現不出扭轉力矩的影響。
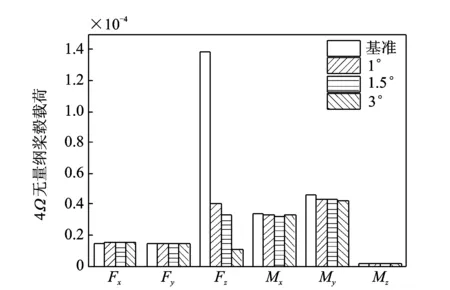
圖11 直接約束法4Ω槳轂載荷Fig.11 4Ω hub load with direct constraint method
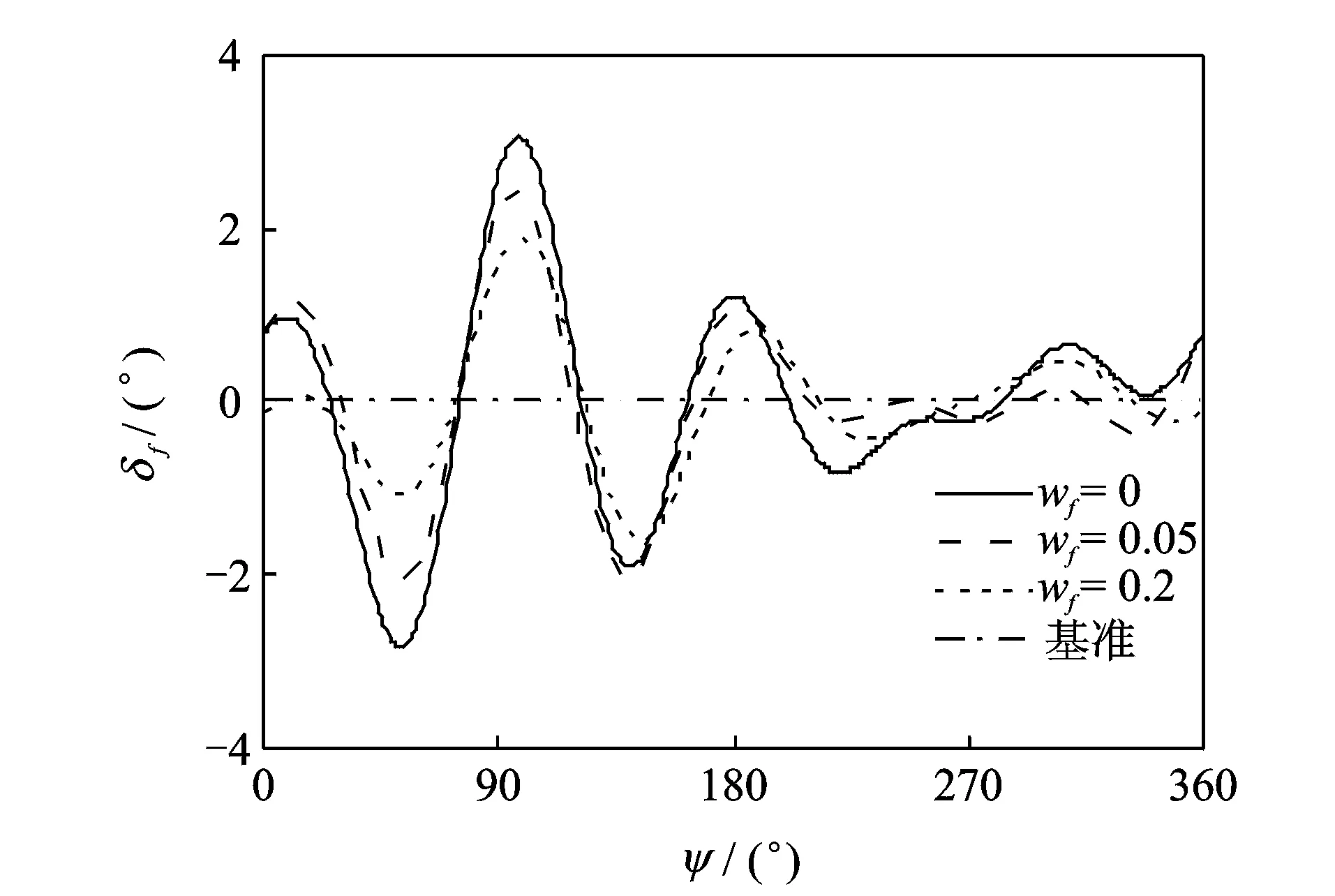
圖12 目標權重法小翼偏轉角Fig.12 Deflection angle with objective weight method
4.3 目標權重法
目標權重法通過加權的形式重構目標函數,圖12對不同權重系數得到的優化小翼偏角進行了比較。可以看出,適當增加權重系數wf能有效降低小翼偏角的峰-峰值,模擬小翼受驅動機構、小翼鉸鏈力矩等限制導致的偏轉能力不足的情況,但不同權重系數得到的小翼偏轉相位基本相同。當wf=0.05時,小翼偏角峰-峰值為4.16°,此時4Ω垂向槳轂振動載荷降低了47.8%,如圖13所示。
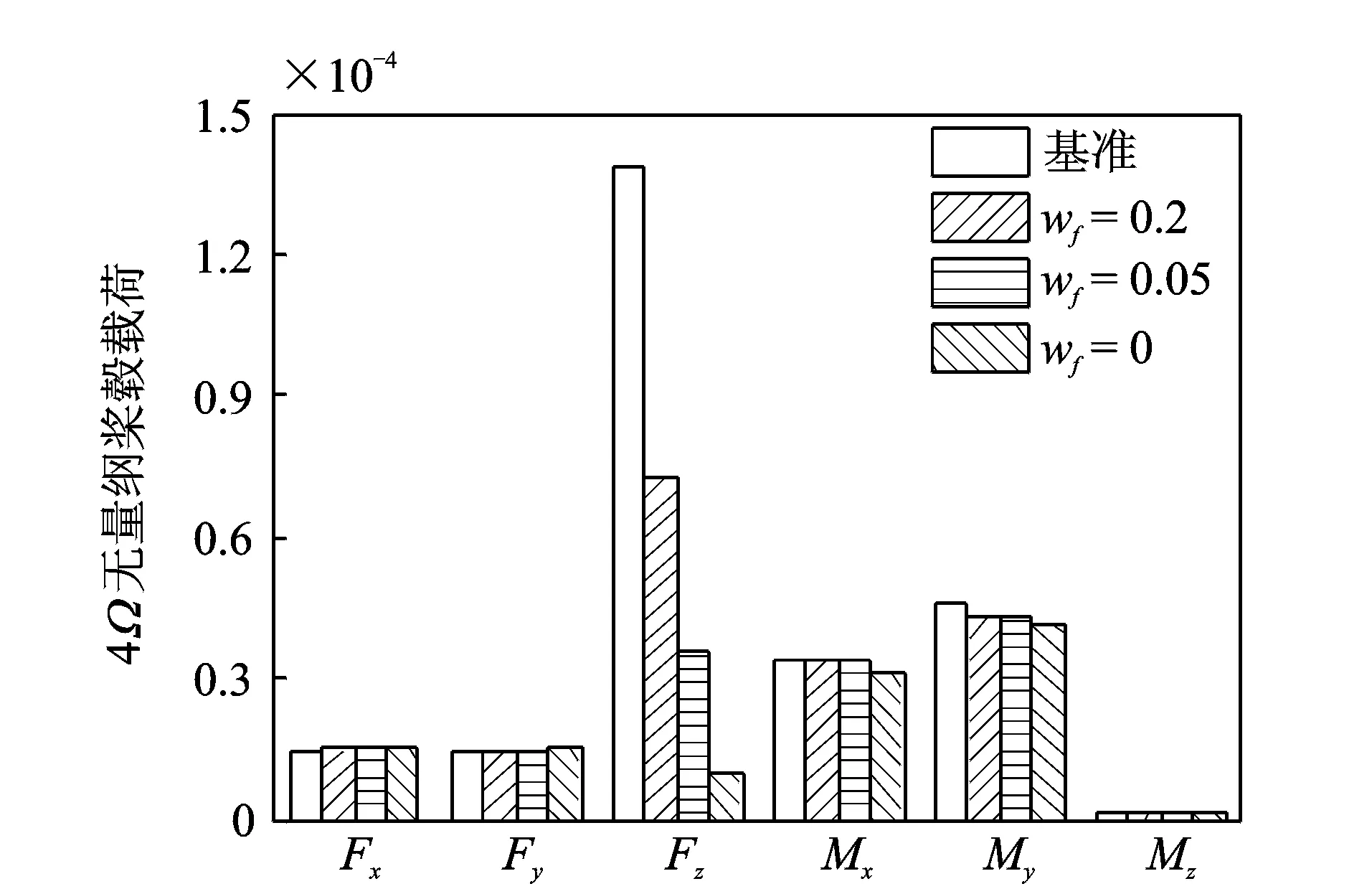
圖13 目標權重法4Ω槳轂載荷Fig.13 4Ω hub load with objective weight method
4.4 偏角限制方法比較
前兩節結果顯示,直接約束法與目標權重法都能在減振的同時約束小翼的偏角峰值。圖14比較了兩種方法,由圖可見:直接約束法的目標函數Jv隨δmax的降低先平緩變化后劇烈增加,δmax>2°時減振效果都比較好;目標權重法的Jv始終隨δmax的降低而明顯增加,呈單調關系。整體上,對于相同的δmax使用直接約束法得到的Jv更小,對小翼偏角做過多的約束會明顯影響小翼的減振效果。
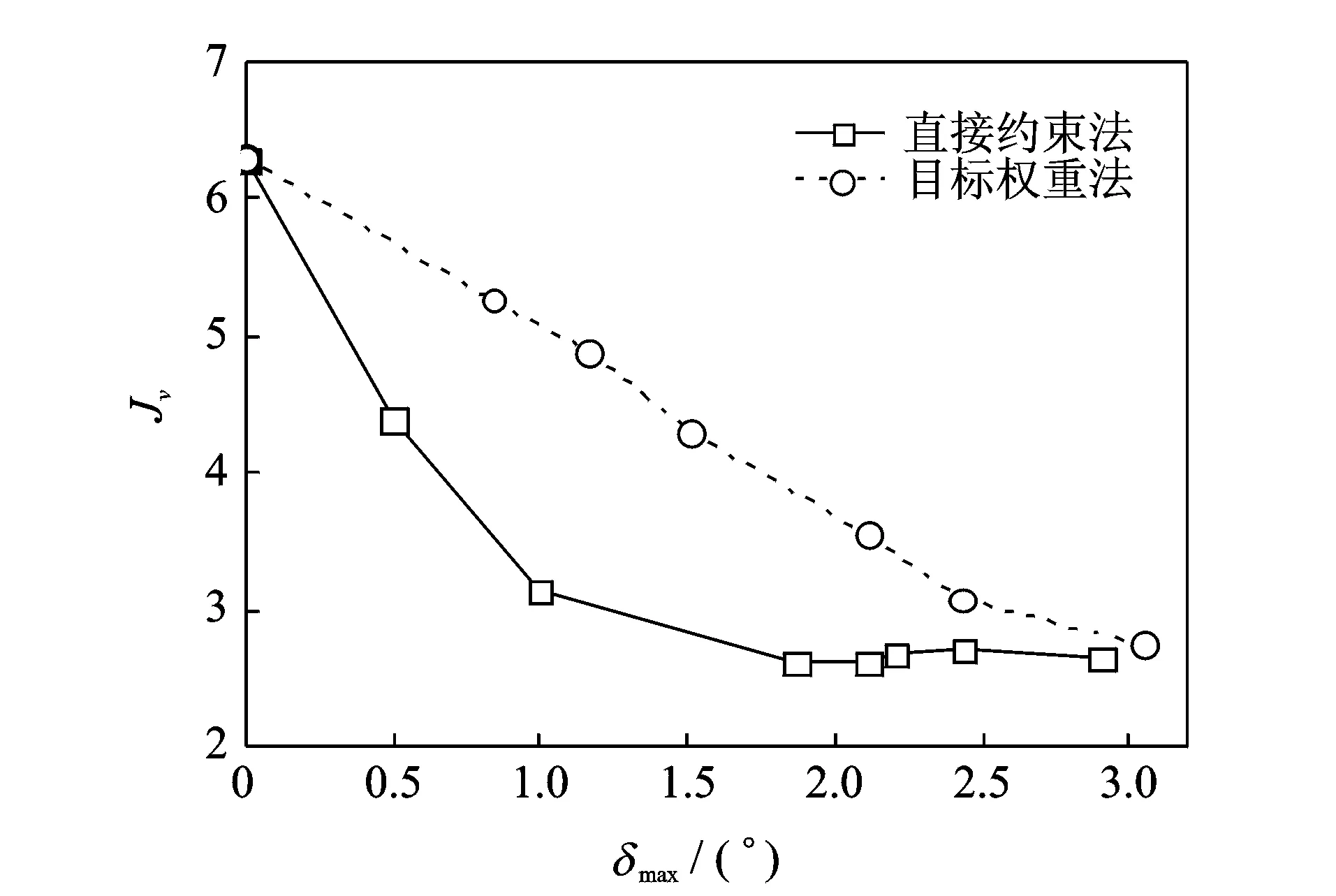
圖14 偏角約束方法比較Fig.14 Comparison of flap angle constraint methods
5 結 論
1) 筆者建立的模型能準確計算旋翼結構載荷與前飛時帶后緣小翼的旋翼氣動載荷。
2) 前進比越大,槳轂垂向載荷的幅值越大。基于優化方法的后緣小翼減振分析模型有效,可確定不同前進比最佳減振狀態的小翼偏角規律。
3) 使用直接約束法或目標權重法能夠模擬小翼偏轉能力不足的情況。偏轉能力對減振效果有明顯影響,為保證減振效果,工程中應盡量增強驅動機構的能力。
[1] Friedmann P P. On-blade control of rotor vibration, noise, and performance: just around the corner? [J]. Journal of the American Helicopter Society, 2014, 59(4): 1-37.
[2] Hagerty B, Kottapalli S. Boeing SMART rotor full-scale wind tunnel test data report [R]. California: NASA Ames Research Center, 2012.[3] Sim B, Potsdam M, Kitaplioglu C, et al. Localized, non-harmonic active flap motions for low frequency in-plane rotor noise reduction [C] ∥AHS 68th Annual Forum. Fort Worth, TX: AHS International, 2012: 8-23.
[4] Lorber P, Hain B, Wang J, et al. Rotor aeromechanics results from the Sikorsky active flap demonstration rotor [C] ∥ AHS 68th Annual Forum. Fort Worth, TX: AHS International, 2012: 553-568.
[5] Koratkar N A, Chopra I. Open-loop hover testing of a smart rotor model [J]. AIAA Journal, 2002, 40(2): 1495-1502.
[6] Lee J H, Natarajan B, Eun W J, et al. Structure and mechanism design of an active trailing-edge flap blade [J]. Journal of Mechanical Science and Technology, 2013, 27(9): 2605-2617.
[7] Cribbs R, Friedmann P P. Actuator saturation and its influence on vibration reduction by actively controlled flaps [C] ∥AIAA/SME/ASCE/AHS/ ASC Structures, Structural Dynamics and Materials Conference. Stratford, CT: AIAA Inc, 2001: 2101-2111.
[8] 張柱, 黃文俊, 楊衛東. 后緣小翼型智能旋翼槳葉模型設計分析與試驗研究 [J]. 南京航空航天大學學報, 2011, 43(3): 296-301.
Zhang Zhu, Hhuang Wenjun, Yang Weidong. Design analysis and test of smart rotor blades model with trailing edge flaps [J]. Journal of Nanjing University of Aeronautics & Astronautics, 2011, 43(3): 296-301.(in Chinese)[9] Fulton M V, Orimiston R A. Hover testing of a small-scale rotor with on-blade elevons [J]. Journal of the American Helicopter Society, 2001, 46(2): 96-106.
[10]Patt D, Liu L, Friedmann P P. Rotorcraft vibration reduction and noise prediction using a unified aeroelastic response simulation [J]. Journal of the American Helicopter Society, 2005, 50(1):95-106.
[11]Falls J, Datta A, Chopra I. Integrated trailing-edge flaps and servotabs for helicopter primary control [J]. Journal of the American Helicopter Society, 2010, 55(3): 1-15.
[12]虞志浩, 楊衛東, 張呈林. 基于Broyden法的旋翼多體系統氣動彈性分析 [J]. 航空學報, 2012, 33(12): 2171-2182.
Yu Zhihao, Yang Weidong, Zhang Chenglin. Aeroelasticity analysis of rotor multibody system based on Broyden method [J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(12): 2171-2182.(in Chinese)
[13]穆雪峰, 姚衛星, 余雄慶, 等. 多學科設計優化中常用代理模型的研究 [J]. 計算力學學報,2005,22(5): 608-612.
Mu Xuefeng, Yao Weixing, Yu Xiongqing, et al. A survey of surrogate models used in MDO [J]. Chinese Journal of Computational Mechanics, 2005, 22(5): 608-612.(in Chinese)
[14]譚劍鋒, 王浩文, 吳超, 等. 基于非定常面元/黏性渦粒子混合法的旋翼/平尾非定常氣動干擾 [J]. 航空學報,2014,35(3): 643-656.
Tan Jianfeng, Wang Haowen, Wu Chao, et al. Rotor/empennage unsteady aerodynamic interaction with unsteady panel/viscous vortex particle hybrid method [J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(3): 643-656.(in Chinese)
[15]吳杰, 楊衛東, 虞志浩. 旋翼槳葉結構載荷計算方法比較研究 [J]. 振動與沖擊, 2014, 33(7): 210-214.
Wu Jie, Yang Weidong, Yu Zhihao. Comparison among rotor blade structural load calculation methods [J]. Journal of Vibration and Shock, 2014, 33(7): 210-214.(in Chinese)
[16]Krzysiak A, Narkiewicz J. Aerodynamic loads on airfoil with trailing-edge flap pitching with different frequencies [J]. Journal of Aircraft, 2006, 43(2): 407-418.
[17]Peterson R L, Maier T. Correlation of wind tunnel and flight test results of a full-scale hingeless rotor [C] ∥AHS Aeromechanics Specialists Conference. Washington DC: AHS International, 1994.
[18]Ananthan S, Baeder J, Sim B W, et al. Prediction and validation of the aerodynamics, structure dynamics, and acoustics of the SMART rotor using a loosely-coupled CFD-CSD analysis [C] ∥ AHS 66th Annual Forum. Phoenix, AZ: AHS International, 2010: 2031-2057.

10.16450/j.cnki.issn.1004-6801.2017.03.003
國家自然科學基金資助項目(11272148);重點實驗室基金資助項目(9140C400401140C40183);江蘇高校優勢學科建設工程資助項目
2015-12-11;
2016-02-25
TH113; V211.47
劉士明,男,1991年1月生,博士。主要研究方向為直升機旋翼動力學。曾發表《優化轉速旋翼性能分析與應用》(《南京航空航天大學學報》2014年第46卷第6期)等論文。
E-mail: liushiming@nuaa.edu.cn
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2020年2期)2020-06-02 11:29:24
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
