大行程精密定位平臺(tái)偏擺誤差的補(bǔ)償方法
2017-07-01 23:14:59劉吉柱張?chǎng)?/span>王陽俊潘明強(qiáng)陳立國
振動(dòng)、測(cè)試與診斷 2017年3期
關(guān)鍵詞:檢測(cè)
劉吉柱, 李 健, 張?chǎng)?王陽俊, 潘明強(qiáng), 陳立國
(1.蘇州大學(xué)機(jī)電工程學(xué)院 蘇州,215021) (2.蘇州大學(xué)蘇州納米科技協(xié)同創(chuàng)新中心 蘇州,215021)
?
大行程精密定位平臺(tái)偏擺誤差的補(bǔ)償方法
劉吉柱1,2, 李 健1,2, 張?chǎng)?,2, 王陽俊1,2, 潘明強(qiáng)1,2, 陳立國1,2
(1.蘇州大學(xué)機(jī)電工程學(xué)院 蘇州,215021) (2.蘇州大學(xué)蘇州納米科技協(xié)同創(chuàng)新中心 蘇州,215021)
精密定位平臺(tái)在導(dǎo)軌動(dòng)連接處剛度較差,在高速高動(dòng)態(tài)工作中這里易產(chǎn)生偏擺振動(dòng)。為了減小偏擺誤差對(duì)定位平臺(tái)的影響,提高定位精度,通過對(duì)直線電機(jī)驅(qū)動(dòng)、氣浮導(dǎo)軌支撐和導(dǎo)向的高精度定位平臺(tái)進(jìn)行研究。根據(jù)定位平臺(tái)偏擺誤差的動(dòng)態(tài)特性,采用偏擺誤差補(bǔ)償方法,設(shè)計(jì)一種偏擺誤差檢測(cè)系統(tǒng),采用平尺和微位移傳感器相結(jié),具有高頻響、非接觸式的特點(diǎn)。設(shè)計(jì)了一種基于壓電陶瓷驅(qū)動(dòng)的x,y兩維微位移補(bǔ)償機(jī)構(gòu)。同時(shí),通過將氣浮導(dǎo)軌滑塊副簡(jiǎn)化成彈簧、質(zhì)量和阻尼相結(jié)合的系統(tǒng),推導(dǎo)出了定位平臺(tái)兩自由度的偏擺振動(dòng)模型。基于誤差補(bǔ)償系統(tǒng)的偏擺誤差補(bǔ)償實(shí)驗(yàn)表明,精密定位平臺(tái)的定位精度得到了較大提高,定位平臺(tái)的定位精度優(yōu)于2 μm。
偏擺誤差; 振動(dòng)模型; 壓電陶瓷; 誤差補(bǔ)償
引 言
隨著納米光刻、微機(jī)電系統(tǒng)(micro-electro-mechanical system,簡(jiǎn)稱MEMS)封裝、超精密加工、微電子工程及生物醫(yī)學(xué)工程等領(lǐng)域的迅速發(fā)展,對(duì)定位平臺(tái)的動(dòng)靜態(tài)特性要求也越來越高,定位系統(tǒng)的發(fā)展也將促進(jìn)超精密加工、精密測(cè)量及大規(guī)模集成電路等行業(yè)的發(fā)展。在大規(guī)模集成電路制作中,電路板上的布線密度越來越高,線路的修復(fù)、連接質(zhì)量等都對(duì)加工行程、速度與精度提出了較高的要求[1]。芯片封裝作業(yè)中,芯片的安裝、固定、密封和引線鍵都需要高精度的定位平臺(tái)裝置來完成[2]。光刻技術(shù)方面,如對(duì)光學(xué)鏡頭進(jìn)行表面輪廓的測(cè)量與誤差補(bǔ)償、粗糙表面的微納米加工、鍍膜、移動(dòng)平臺(tái)的行程及定位精度等都提出了極高的要求[3-4]。隨著高精密領(lǐng)域的不斷發(fā)展,定位平臺(tái)呈現(xiàn)出大行程、高精度的發(fā)展趨勢(shì)[5-6]。然而大行程與高精度相互矛盾統(tǒng)一,當(dāng)定位平臺(tái)行程越大,機(jī)構(gòu)的設(shè)計(jì)及外界環(huán)境對(duì)定位平臺(tái)的定位精度影響越大。目前,通過對(duì)定位平臺(tái)進(jìn)行誤差補(bǔ)償從而提高定位精度的方法,許多國內(nèi)外學(xué)者已經(jīng)做了大量研究,并取得了一系列的成果[7-9]。
對(duì)于納米壓印平臺(tái),偏擺誤差是影響其定位精度的關(guān)鍵因素[10]。筆者針對(duì)平臺(tái)的偏擺誤差進(jìn)行建模分析,建立了偏擺誤差檢測(cè)模型,研究了基于偏擺誤差補(bǔ)償?shù)亩ㄎ幌到y(tǒng),改善了定位平臺(tái)精度。
1 偏擺誤差分析及模型的建立
納米壓印平臺(tái)采用XY-table型串聯(lián)結(jié)構(gòu),如圖1所示。其上、下直線運(yùn)動(dòng)軸采用超精密靜壓氣浮導(dǎo)軌支承和導(dǎo)向,無鐵芯直線電機(jī)驅(qū)動(dòng),采用精密光柵尺進(jìn)行位移反饋,從而實(shí)現(xiàn)了無磨損的直接驅(qū)動(dòng),并結(jié)合了氣體靜壓導(dǎo)軌和直線電機(jī)的優(yōu)點(diǎn),目前也是高精密領(lǐng)域定位平臺(tái)的典型代表。定位平臺(tái)進(jìn)行直線運(yùn)動(dòng)時(shí),不可避免地會(huì)產(chǎn)生幾何誤差以及平臺(tái)的偏擺振動(dòng)誤差,然而定位平臺(tái)的偏擺振動(dòng)誤差作為動(dòng)態(tài)誤差,特性復(fù)雜,大小、方向都隨時(shí)改變[11]。
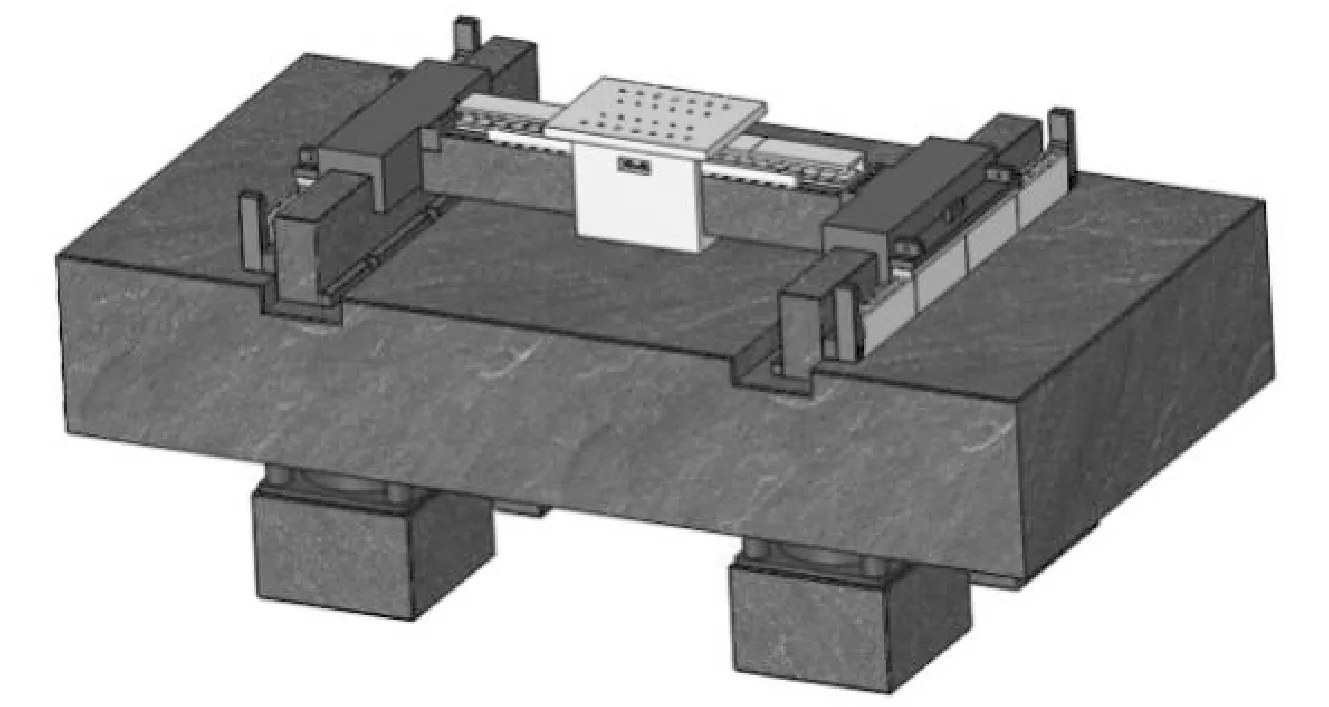
圖1 大行程納米壓印平臺(tái)Fig.1 Large stroke nano imprint platform
1.1 幾何誤差分析及模型建立
由于高精度定位平臺(tái)x軸和y軸采用串聯(lián)方式,所以可分別計(jì)算兩軸幾何誤差,通過對(duì)兩軸誤差進(jìn)行疊加,可得高精度定位系統(tǒng)末端的綜合誤差。在平臺(tái)側(cè)面安裝4路位移傳感器A,B,C和D,分別建立x,y軸定位平臺(tái)的幾何誤差模型,如圖2、圖3所示。
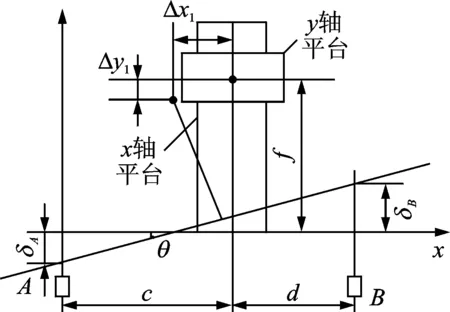
圖2 x軸平臺(tái)幾何誤差模型Fig.2 x-axis platform geometric error model
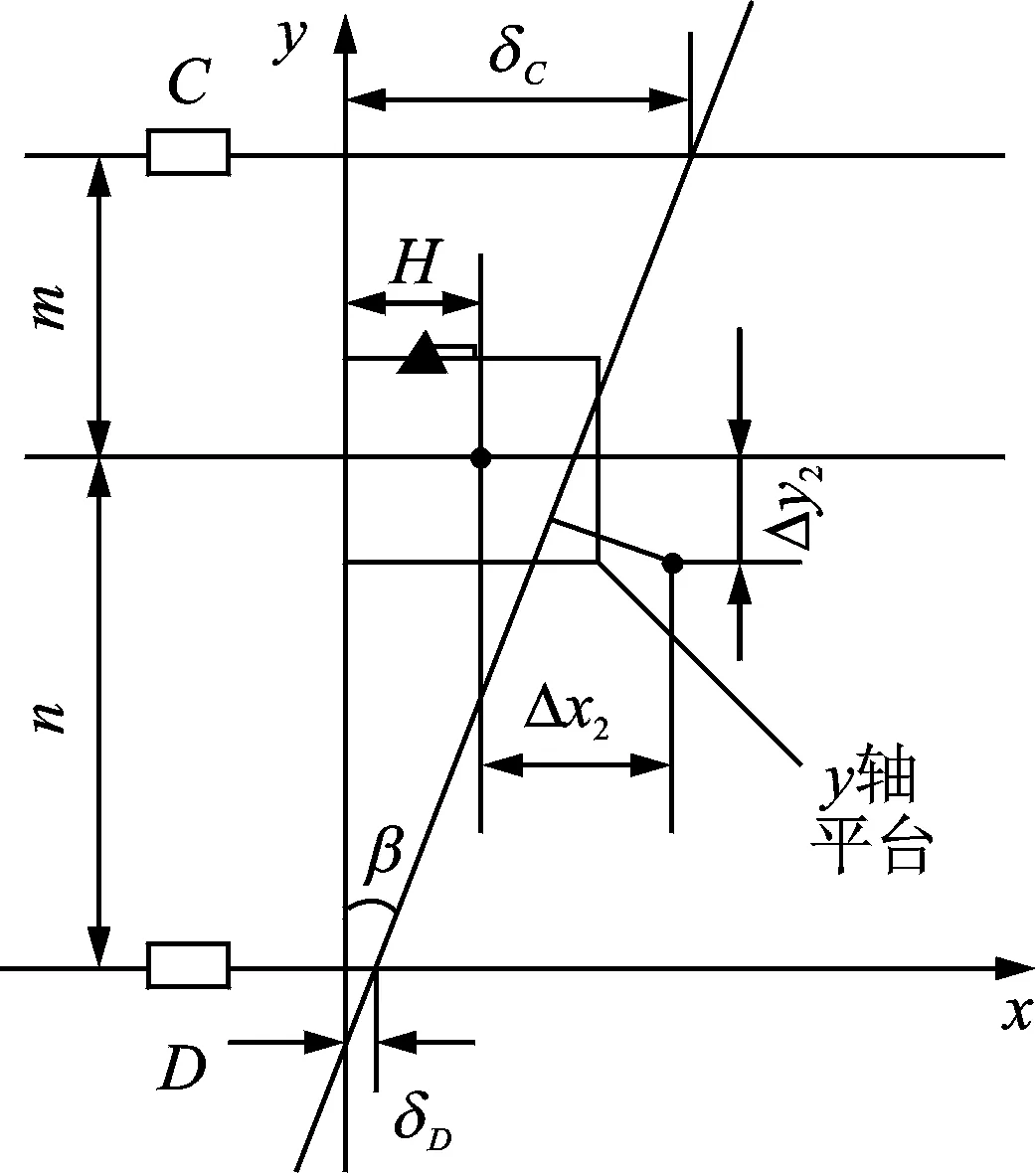
圖3 y軸平臺(tái)幾何誤差模型Fig.3 y-axis platform geometric error model
通過將定位平臺(tái)x軸和y軸偏擺誤差進(jìn)行疊加,定位平臺(tái)的綜合幾何誤差公式推導(dǎo)如下
(1)
由式(1)可知,精密定位系統(tǒng)的幾何誤差可通過4路傳感器的位移變化δA,δB,δC和δD進(jìn)行描述。
1.2 偏擺振動(dòng)模型建立
為進(jìn)一步簡(jiǎn)化分析,可將導(dǎo)軌滑塊副簡(jiǎn)化成由彈簧-質(zhì)量-阻尼相結(jié)合的系統(tǒng),并假設(shè)平臺(tái)兩軸方向的直線電機(jī)作用力和等效剛度都作用在各軸平臺(tái)質(zhì)心處,最終建立定位平臺(tái)的偏擺振動(dòng)模型,如圖4所示。由于導(dǎo)軌固定在平臺(tái)基座上,且每根導(dǎo)軌上有2個(gè)滑塊,因此可使兩側(cè)對(duì)稱的導(dǎo)軌滑塊副的剛度和阻尼系數(shù)分別簡(jiǎn)化為剛度K1,K2,K3,K4和C1,C2,C3,C4。同理,Kox,Koy和Cox,Coy分別為平臺(tái)在x軸和y軸方向簡(jiǎn)化之后的直線電機(jī)驅(qū)動(dòng)剛度和等效阻尼系數(shù)。
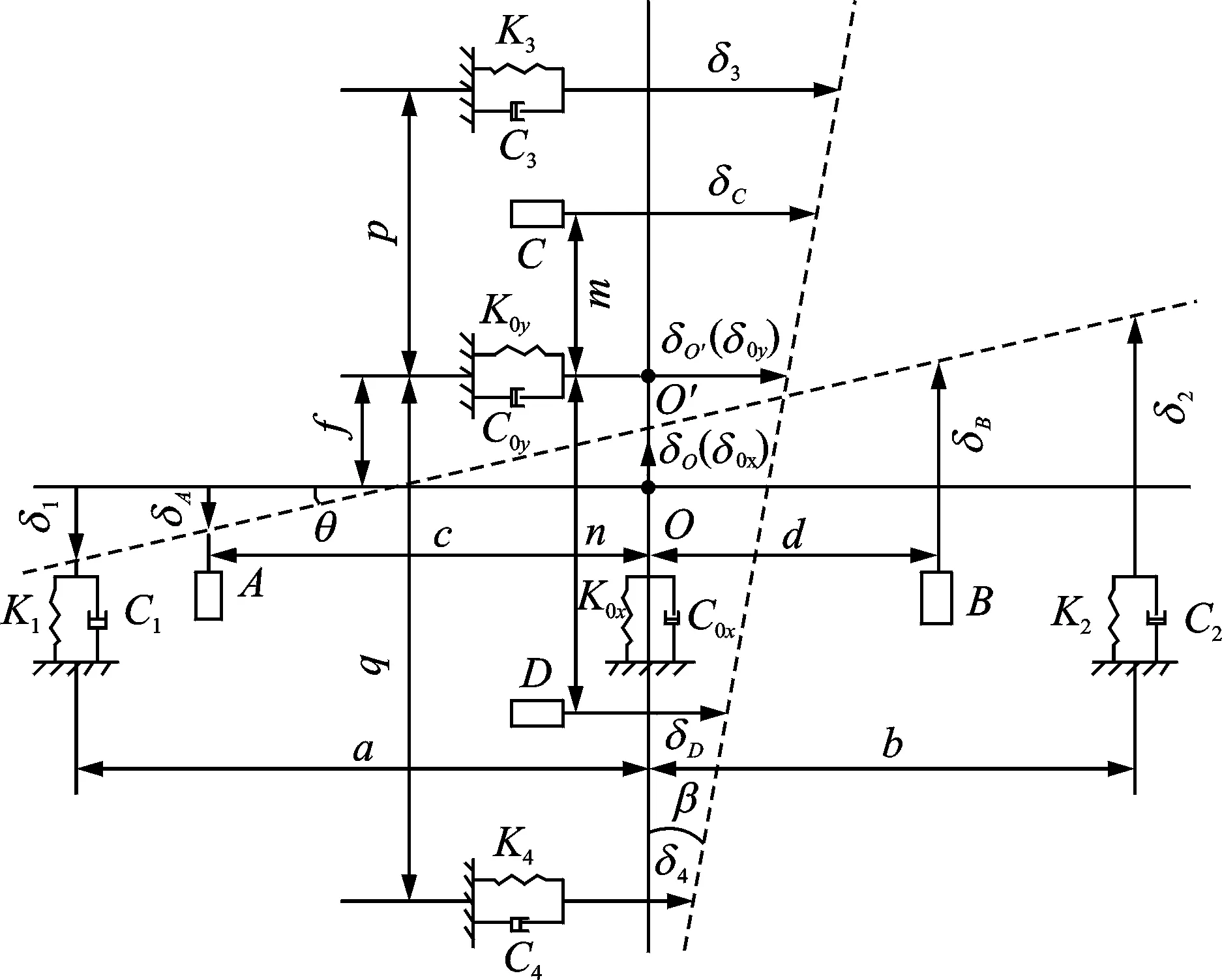
圖4 定位平臺(tái)偏擺振動(dòng)簡(jiǎn)化模型Fig.4 Simplified yaw vibration model of positioning platform
根據(jù)圖4,對(duì)x軸定位平臺(tái)剛體應(yīng)用質(zhì)心運(yùn)動(dòng)定律和剛體轉(zhuǎn)動(dòng)定律,建立其運(yùn)動(dòng)微分方程
(2)
其中:Mx為x,y軸平臺(tái)的共同質(zhì)量;Jx為x,y軸平臺(tái)繞其質(zhì)心的轉(zhuǎn)動(dòng)慣量。
將K1=K2=2K,K0x=2K0,C1=C2=2C,C0x=2C0帶入式(2)得
(3)
Cx=

式(3)的解為
(4)
其中:Aij由施加于定位平臺(tái)的初始條件決定。
同理,對(duì)y軸定位平臺(tái)剛體應(yīng)用質(zhì)心運(yùn)動(dòng)定律和剛體轉(zhuǎn)動(dòng)定律,建立運(yùn)動(dòng)微分方程,得運(yùn)動(dòng)微分方程的解為
(5)
將精密定位平臺(tái)x,y軸的運(yùn)動(dòng)微分方程的解進(jìn)行疊加,得到平臺(tái)的綜合偏擺振動(dòng)方程
(6)
根據(jù)以上分析,可以得到定位平臺(tái)的偏擺振動(dòng)固有頻率和系統(tǒng)末端工作點(diǎn)的偏擺運(yùn)動(dòng)軌跡,為偏擺誤差檢測(cè)和誤差補(bǔ)償提供理論參考。
2 偏擺誤差檢測(cè)方法
針對(duì)所研究的定位平臺(tái)偏擺誤差特點(diǎn),設(shè)計(jì)一種偏擺誤差檢測(cè)系統(tǒng)。采用平尺和電容式微位移傳感器相結(jié)合的方式,將非接觸式平尺連接支架固定在定位平臺(tái)上,微位移傳感器固定在工作臺(tái)側(cè)面的基座上,該系統(tǒng)具有動(dòng)態(tài)性能好和分辨率高等優(yōu)點(diǎn)。
在平臺(tái)運(yùn)動(dòng)過程中,通過檢測(cè)位移傳感器與平尺間相對(duì)位移的變化,根據(jù)檢測(cè)算法得出平臺(tái)的偏擺誤差。
分別以傳感器A,D為坐標(biāo)原點(diǎn)建立直角坐標(biāo)系,得到x,y軸定位平臺(tái)的偏擺誤差檢測(cè)模型,如圖5,6所示。當(dāng)x,y軸分別產(chǎn)生進(jìn)給位移Sx和Sy時(shí),可得x軸方向定位系統(tǒng)末端點(diǎn)的偏擺誤差為
(7)
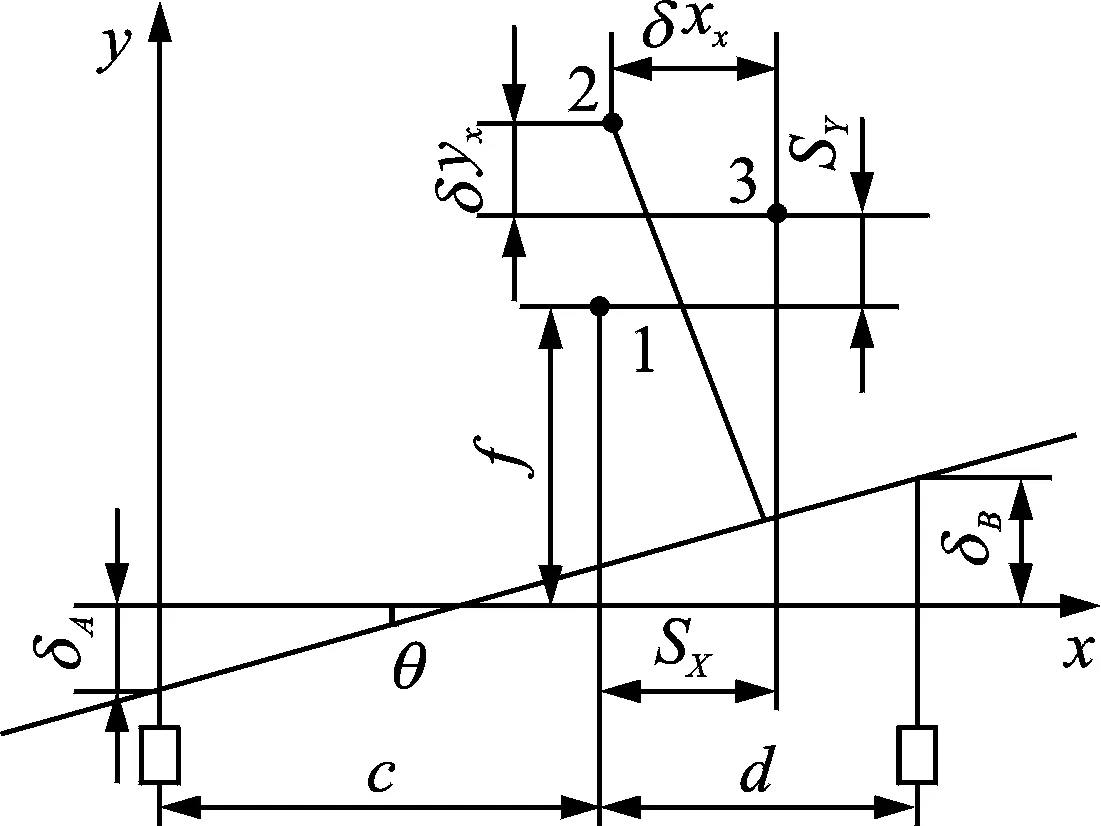
圖5 x軸定位平臺(tái)偏擺誤差檢測(cè)模型Fig.5 x-axis positioning platform yaw error detection model
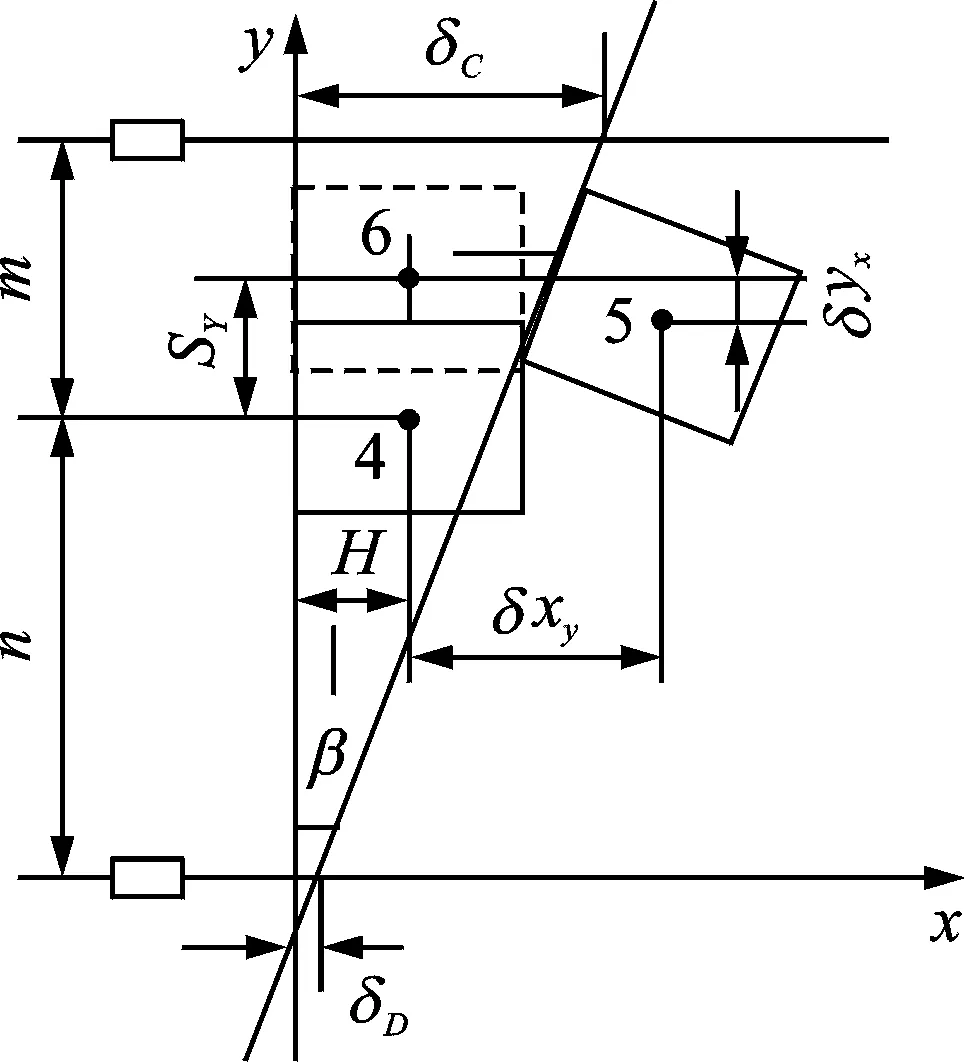
圖6 y軸定位平臺(tái)偏擺誤差檢測(cè)模型Fig.6 y-axis positioning platform yaw error detection model
同理可得y軸方向定位系統(tǒng)末端點(diǎn)的偏擺誤差
(8)
通過將x和y軸的偏擺誤差進(jìn)行疊加,推導(dǎo)可得定位系統(tǒng)末端的綜合偏擺誤差如下
(9)
根據(jù)式(9)可知,定位系統(tǒng)末端點(diǎn)的綜合偏擺誤差值與以下參數(shù)有關(guān):精密定位平臺(tái)的初始位置、電容傳感器的安裝位置、定位平臺(tái)的運(yùn)動(dòng)距離和位移傳感器檢測(cè)的位移變化量。
3 偏擺誤差補(bǔ)償機(jī)構(gòu)
筆者通過設(shè)計(jì)二維微動(dòng)誤差補(bǔ)償平臺(tái)對(duì)定位平臺(tái)進(jìn)行偏擺誤差補(bǔ)償。補(bǔ)償效果是否理想關(guān)鍵在于微動(dòng)誤差補(bǔ)償平臺(tái)的設(shè)計(jì)是否合理有效,其對(duì)縮短誤差補(bǔ)償系統(tǒng)的穩(wěn)定時(shí)間和提高系統(tǒng)的補(bǔ)償效果具有重要作用;因此,所設(shè)計(jì)的微動(dòng)誤差補(bǔ)償平臺(tái)需要具有一定的補(bǔ)償范圍、較高的動(dòng)態(tài)特性和位移分辨率。筆者提出以下性能指標(biāo):
1) 重量輕、響應(yīng)快,能實(shí)現(xiàn)高速、高加速度運(yùn)動(dòng);
2) 工作行程達(dá)到10 μm以上,滿足誤差補(bǔ)償范圍要求;
3) 位移耦合度低于2%,滿足定位系統(tǒng)定位精度的要求;
4) 固有頻率大于1 kHz,滿足定位平臺(tái)偏擺誤差實(shí)時(shí)補(bǔ)償要求。
筆者采用壓電陶瓷驅(qū)動(dòng),結(jié)合橢圓形機(jī)構(gòu)、直角平板柔性鉸鏈和平板柔性鉸鏈設(shè)計(jì)了一種單平面二維微動(dòng)補(bǔ)償平臺(tái),不僅具有體積小、重量輕和結(jié)構(gòu)簡(jiǎn)單等優(yōu)點(diǎn),而且其位移耦合度小,動(dòng)態(tài)特性好,能夠進(jìn)行大行程定位平臺(tái)的偏擺誤差實(shí)時(shí)補(bǔ)償。
3.1 微動(dòng)誤差補(bǔ)償平臺(tái)的設(shè)計(jì)
微動(dòng)誤差補(bǔ)償平臺(tái)機(jī)構(gòu)如圖7所示,工作臺(tái)的四角采用4個(gè)對(duì)稱的直角平板柔性鉸鏈,此結(jié)構(gòu)不僅能夠有效減小機(jī)構(gòu)中存在的交叉耦合位移,而且在一定程度上能減小外界的干擾。在工作臺(tái)與橢圓形機(jī)構(gòu)之間采用平板柔性鉸鏈進(jìn)行連接,通過控制其尺寸使微動(dòng)平臺(tái)在x,y方向的位移耦合最小,更好地達(dá)到誤差補(bǔ)償、提高定位精度的要求。壓電陶瓷選用PTBS150/7×7/20型驅(qū)動(dòng)器,其具有剛度大、推力大及響應(yīng)快等優(yōu)點(diǎn)。壓電陶瓷驅(qū)動(dòng)電源為HPV-150型驅(qū)動(dòng)電源,采購于哈爾濱工業(yè)大學(xué)博實(shí)精密測(cè)控有限公司。
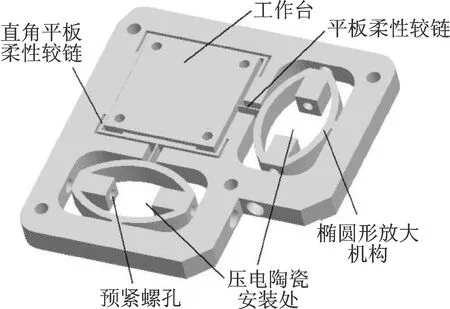
圖7 微動(dòng)誤差補(bǔ)償平臺(tái)機(jī)構(gòu)圖Fig.7 Organization chart of the micro-positioning stage
設(shè)計(jì)要求微定位平臺(tái)輸出位移約為10 μm,壓電陶瓷的輸出位移設(shè)計(jì)為14 μm,根據(jù)橢圓形機(jī)構(gòu)剛度公式可得
(10)
其中:L1為PZT實(shí)際輸出位移;L0為PZT無外載時(shí)的名義輸出;Kp為PZT剛度;K為橢圓形機(jī)構(gòu)的剛度。
由于橢圓形機(jī)構(gòu)是全對(duì)稱結(jié)構(gòu),可將其簡(jiǎn)化為如圖8所示機(jī)構(gòu)。其中:p為壓電陶瓷作用在橢圓形機(jī)構(gòu)的作用力;″L為力p引起的實(shí)際輸入位移。由于直角平板柔性鉸鏈的剛度Kc作用產(chǎn)生力F,從而將抑制A點(diǎn)的位移x。
圖8 橢圓形機(jī)構(gòu)簡(jiǎn)化圖Fig.8 Simple diagram of the oval amplification mechanism
工作臺(tái)四角的直角平板柔性鉸鏈完全對(duì)稱,忽略x,y方向的耦合作用,將其簡(jiǎn)化為基本靜定系進(jìn)行分析,可推導(dǎo)出直角平板柔性鉸鏈在x,y方向的剛度為
Kx=Ky=Kc=5Ebt3/2L3
(11)
根據(jù)式(5)及以上分析可知,不僅橢圓形機(jī)構(gòu)的參數(shù)會(huì)影響其剛度,直角平板柔性鉸鏈幾何參數(shù)寬度b和厚長(zhǎng)比e(e=t/L)的增加將使工作臺(tái)部分剛度增大,從而抑制A點(diǎn)的位移''L,使橢圓形機(jī)構(gòu)在如圖8所示的x方向剛度K增大。
3.2 微動(dòng)誤差補(bǔ)償平臺(tái)的有限元分析
微定位平臺(tái)材料選用Al7075,其重要參數(shù)如下:彈性模量為72 GPa,泊松比為0.31,屈服極限為505 MPa,密度為2 800 kg/m3。ANSYS分析時(shí)采用3維20節(jié)點(diǎn)實(shí)體單元(SOLID95)進(jìn)行智能劃分。
通過對(duì)微定位平臺(tái)進(jìn)行模態(tài)分析,可以仿真得到其固有頻率和對(duì)應(yīng)振型,以了解定位系統(tǒng)動(dòng)態(tài)特性,對(duì)微動(dòng)補(bǔ)償平臺(tái)的設(shè)計(jì)具有重要作用。圖9為對(duì)選定參數(shù)的微定位平臺(tái)進(jìn)行模態(tài)分析得到的第1階振型圖。可以看出,微定位平臺(tái)的第1階固有頻率為1 068 Hz。因此,微定位平臺(tái)動(dòng)態(tài)特性較好,能有效避免環(huán)境振動(dòng)對(duì)工作臺(tái)的影響,滿足設(shè)計(jì)要求。
圖9 微動(dòng)臺(tái)第1階陣型Fig.9 The first vibration mode of the stage
對(duì)選定參數(shù)的微定位平臺(tái)的3D模型進(jìn)行有限元仿真,確定其剛度及應(yīng)力是否達(dá)到要求。在x,y方向的壓電陶瓷均加載300 N的力時(shí),可得橢圓形機(jī)構(gòu)與壓電陶瓷接觸處產(chǎn)生的位移約等于設(shè)計(jì)位移14 μm(略大于此處的設(shè)計(jì)位移10.5 μm)。其應(yīng)力結(jié)果對(duì)檢驗(yàn)微定位平臺(tái)的強(qiáng)度有效微動(dòng)臺(tái)的應(yīng)力分布云圖見圖10,最大應(yīng)力發(fā)生在平板鉸鏈連接處,大小為46.915 MPa<[σ]=50.5 MPa,滿足要求。
圖10 加載300 N時(shí)微動(dòng)臺(tái)的應(yīng)力分布云圖Fig.10 Stress contour of the stage loaded 300 N
橢圓形機(jī)構(gòu)在單方向加載300N的力時(shí),輸出位移L1為14.911 μm。工作臺(tái)末端中點(diǎn)在x方向產(chǎn)生進(jìn)給位移x約為10.900μm。由于平板鉸鏈的影響,工作臺(tái)末端中點(diǎn)在y方向產(chǎn)生的耦合位移Δy約為0.118 μm。因此,微定位平臺(tái)的位移耦合度為1.083%,位移耦合較小,微定位平臺(tái)的位移輸出系數(shù)ξ=0.731。橢圓形機(jī)構(gòu)的剛度K和工作臺(tái)的最大進(jìn)給位移ΔS分別為
通過仿真結(jié)果可知,所設(shè)計(jì)的二維微動(dòng)補(bǔ)償平臺(tái)剛度和行程均能滿足設(shè)計(jì)要求。
4 偏擺誤差補(bǔ)償實(shí)驗(yàn)
大行程精密定位平臺(tái)控制系統(tǒng)主要由大行程精密定位系統(tǒng)、偏擺誤差檢測(cè)系統(tǒng)和偏擺誤差補(bǔ)償系統(tǒng)組成。
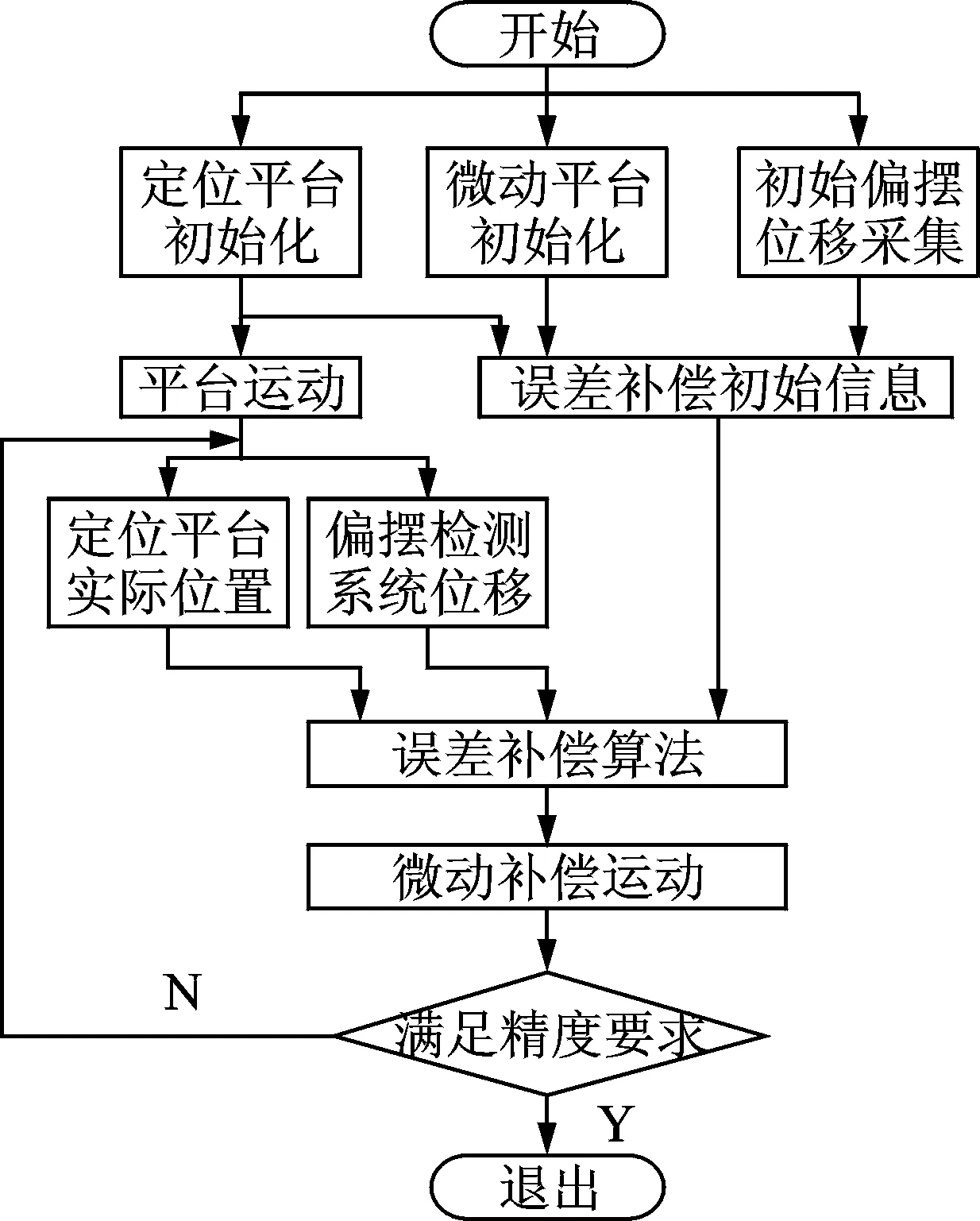
圖11 偏擺誤差補(bǔ)償控制流程圖Fig.11 The control flow graph of yaw error compensation
筆者搭建的偏擺誤差檢測(cè)系統(tǒng),主要由上位機(jī)、數(shù)據(jù)采集卡、微位移傳感器及固定安裝的直線平尺等組成,通過位移檢測(cè)傳感器與平尺的相對(duì)距離變化,根據(jù)檢測(cè)算法計(jì)算出偏擺誤差的大小。微動(dòng)誤差補(bǔ)償系統(tǒng)由控制計(jì)算機(jī)、微動(dòng)誤差補(bǔ)償平臺(tái)、數(shù)據(jù)采集卡、壓電陶瓷及其驅(qū)動(dòng)電源等組成。基于壓電陶瓷驅(qū)動(dòng)的微動(dòng)誤差補(bǔ)償平臺(tái),采用橢圓形放大機(jī)構(gòu)增加平臺(tái)位移,由直角平板柔性鉸鏈進(jìn)行傳動(dòng)。偏擺誤差補(bǔ)償流程如圖11所示,微動(dòng)誤差補(bǔ)償系統(tǒng)根據(jù)偏擺誤差檢測(cè)系統(tǒng)檢測(cè)結(jié)果對(duì)定位平臺(tái)產(chǎn)生的偏擺誤差進(jìn)行誤差補(bǔ)償,從而提高其定位精度。
為檢驗(yàn)偏擺誤差補(bǔ)償效果,使平臺(tái)以最大速度分別在x,y軸平臺(tái)的行程范圍內(nèi)按規(guī)劃軌跡進(jìn)行運(yùn)動(dòng)。圖12為x軸偏擺誤差測(cè)試曲線,其中:圖(a)為未進(jìn)行偏擺誤差補(bǔ)償時(shí)系統(tǒng)末端點(diǎn)的偏擺誤差曲線,誤差幅值約為3.5 μm;圖(b)為誤差補(bǔ)償后系統(tǒng)末端點(diǎn)的偏擺誤差曲線,誤差幅值減小到0.9 μm,補(bǔ)償效果明顯。
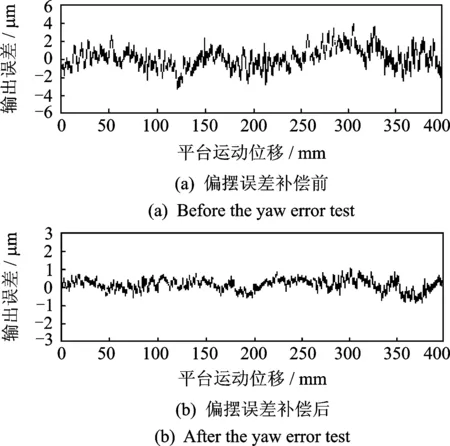
圖12 x軸偏擺誤差前后測(cè)試曲線Fig.12 x-axis yaw error curve before and after the test
采用相同方法,可得平臺(tái)y軸偏擺誤差測(cè)試曲線,如圖13所示。其中:圖(a)為未進(jìn)行偏擺誤差補(bǔ)償時(shí)系統(tǒng)末端點(diǎn)的偏擺曲線,誤差幅值約為3 μm;圖(b)為進(jìn)行誤差補(bǔ)償后系統(tǒng)末端點(diǎn)的偏擺誤差幅值約為0.9 μm,補(bǔ)償效果明顯。
根據(jù)實(shí)驗(yàn)結(jié)果可知,所設(shè)計(jì)的微動(dòng)補(bǔ)償平臺(tái)可以對(duì)大行程精密定位平臺(tái)進(jìn)行偏擺誤差補(bǔ)償,有效地改善了定位平臺(tái)的定位精度,實(shí)現(xiàn)了大行程定位平臺(tái)的精密定位。
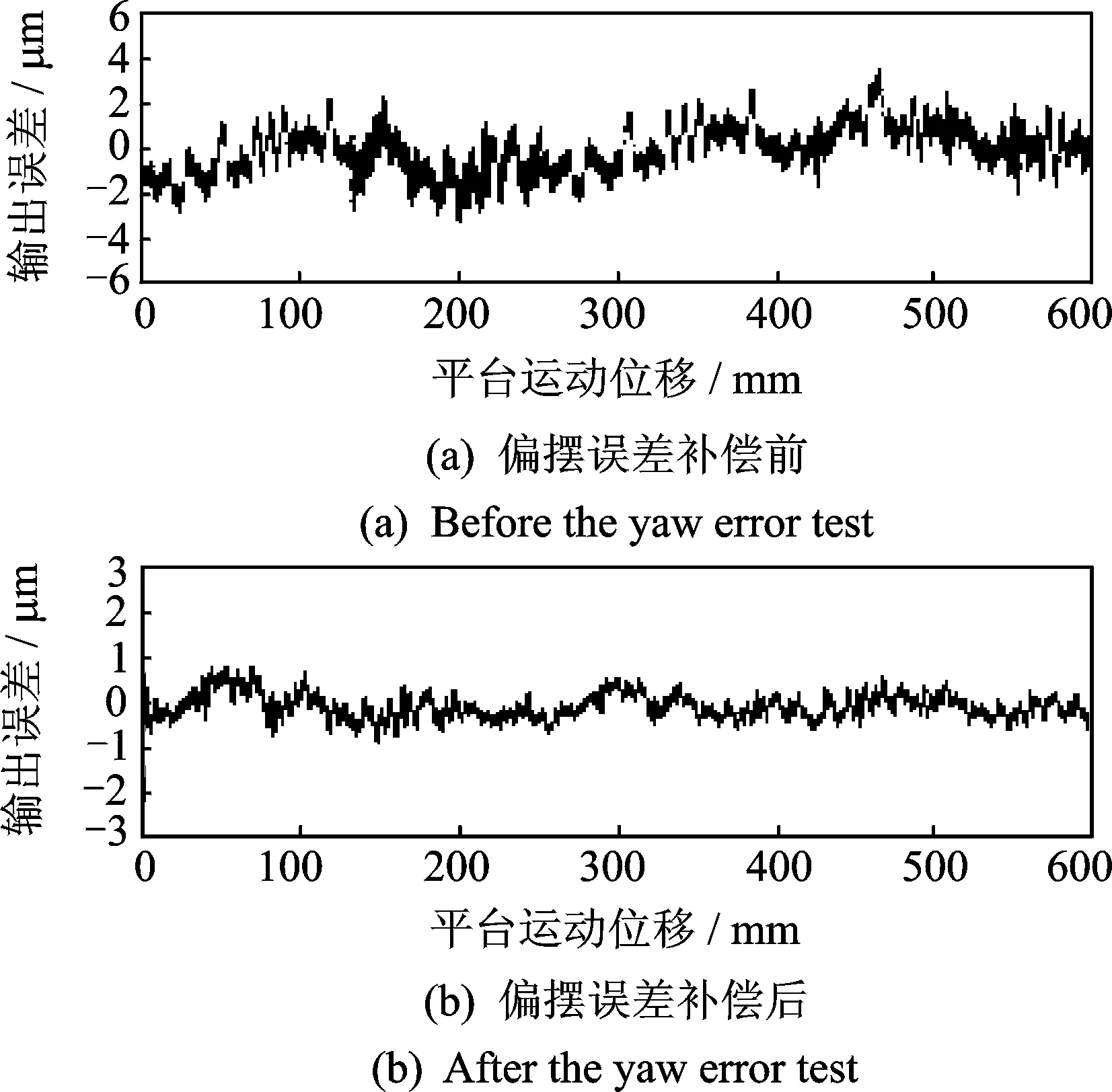
圖13 y軸偏擺誤差前后測(cè)試曲線Fig.13 y-axis yaw error curve before and after the test
5 結(jié)束語
通過分析大行程精密定位平臺(tái)定位精度的偏擺誤差,建立了相應(yīng)的幾何誤差模型和偏擺振動(dòng)模型,基于平尺和電容式位移傳感器設(shè)計(jì)了非接觸式的偏擺誤差檢測(cè)系統(tǒng),得到偏擺誤差檢測(cè)算法。通過實(shí)驗(yàn)研究,采用壓電陶瓷驅(qū)動(dòng)、柔性鉸鏈傳動(dòng)的微動(dòng)補(bǔ)償平臺(tái)建立的誤差補(bǔ)償系統(tǒng)能夠有效地對(duì)偏擺誤差進(jìn)行實(shí)時(shí)補(bǔ)償,使大行程精密定位平臺(tái)的定位精度優(yōu)于2μm,驗(yàn)證了所研究誤差補(bǔ)償方法的正確性和可行性。
[1] Gu Yangqin, Chen Liguo, Liu Jizhu, et al. Design of a single-plane two-dimensional micro-positioning stage based on the oval amplification mechanism[C]∥IEEE International Conference on Information and Automation. Yinchuan,China:IEEE, 2013:1147-1152.
[2] Sun Lining, Jie Degang, Liu Yanjie, et al. Investigation on a novel dual-grating macro-micro driven high speed precision positioning system for NEMS[C]∥Proceedings of the IEEE/NEMS 2006 International Conference on Nano-Micro Egineered and Molecular Systems. Zhuhai, China: Insitute of Electrical & Electronics.Computer Society, 2006: 646-650.
[3] Yoshikazu Y, Akimasa S, Motoyuki S. Lithgraphy: its path of evolution and future trends[J]. Imaging Science and Photochemistry, 2012(1):1-8.
[4] 朱煜,尹文生,段廣洪.光刻機(jī)超精密工作的研究[J].電子工業(yè)專用設(shè)備,2004(2):25-28.
Zhu Yi, Yin Wensheng, Duan Guanghong. Study on ultra precision of the photoetching machine[J]. For Special Equipment for Electronic Industry, 2004(2):25-28.(in Chinese)
[5] 林海波,楊國哲,黃小良.大行程超精密工作臺(tái)的研究[J].機(jī)械設(shè)計(jì)與制造,2010, 6(6): 130-131.
Lin Haibo, Yang Guozhe, Huang Xiaoliang. Design of a large travel ultra precision stage[J]. Machinery Design & Manufacture, 2010, 6(6): 130-131. (in Chinese)
[6] Kwon S J, Chung W K. Robust and time-optimal control strategy for coarse/fine dual-stage manipulators[C]∥Proceedings of the 2000 IEEE International Conference on Robotics and Automation. San Francisco, CA: IEEE, 2000: 4051-4056.
[7] 劉建春,郭隱彪,邵明亮. 光學(xué)非球面檢測(cè)平臺(tái)誤差補(bǔ)償[J]. 振動(dòng)、測(cè)試與診斷, 2011, 31(2):229-232.
Liu Jianchun, Guo Yinbiao, Shao Minliang. Error compensation for optical aspheric surface metrical platform[J]. Journal of Vibration,Measurement & Diagnosis, 2011, 31(2):229-232. (in Chinese)
[8] 劉明,章青. 運(yùn)用多體理論和神經(jīng)網(wǎng)絡(luò)的機(jī)床熱誤差補(bǔ)償[J]. 振動(dòng)、測(cè)試與診斷,2010,30(6): 657-661.
Liu Min, Zhang Qin. Thermal error model and compensation of machining tool using multibody system theory and neural network[J]. Journal of Vibration, Measurement & Diagnosis,2010,30(6): 657-661. (in Chinese)
[9] 孫麟治,李鳴鳴,程維明.精密定位技術(shù)研究[J]. 光學(xué)精密工程,2005, 13(S): 69-75.
Sun Linzhi, Li Minmin, Chen Weimin. Study on precision positioning technique[J]. Optics and Precision Engineering, 2005, 13(S):69-75. (in Chinese)
[10]晏祖根,孫立寧. 高速精密定位平臺(tái)的偏擺誤差實(shí)時(shí)補(bǔ)償[J]. 哈爾濱工業(yè)大學(xué)學(xué)報(bào), 2009, 41(12): 290-294.Yan Zugen, Sun Lining. A novel precision positioning table based on real-time yaw error compensation[J]. Journal of Harbin Institute of Technology, 2009, 41(12): 290-294. (in Chinese)
[11]張春巍,李蘆鈺,喻言,等. 懸吊結(jié)構(gòu)體系擺振響應(yīng)測(cè)試及非線性誤差修正[J]. 振動(dòng)、測(cè)試與診斷,2010,30(3):227-231.
Zhang Chunwei, Li Luyu, Yu Yan, et al. Swing response measuring and nonlinear error modification of suspended structure system in pendulum vibration mode[J]. Journal of Vibration, Measurement & Diagnosis, 2010,30(3): 227-231. (in Chinese)
10.16450/j.cnki.issn.1004-6801.2017.03.013
國家自然科學(xué)基金資助項(xiàng)目(61273340);國家高技術(shù)研究發(fā)展計(jì)劃(“八六三”計(jì)劃)資助項(xiàng)目(2013AA041109)
2015-04-16;
2015-06-03
TH113.2; TH162; TG806
劉吉柱,男,1978年8月生,博士、副教授。主要研究方向?yàn)闄C(jī)電一體化技術(shù)、電機(jī)及驅(qū)動(dòng)控制技術(shù)。曾發(fā)表《Selecting of the temperature measurement points for positioning platform with large trip and high precision thermally induced error compensation model》(《Applied Mechanics and Materials》Vol.431)等論文。 E-mail:liu_jizhu@163.com
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
