基于自抗擾控制的無人機光電吊艙視軸穩定技術
2017-07-04 07:35:22孫立志海鷹航空通用裝備有限責任公司
無人機 2017年11期
關鍵詞:模型
孫立志(海鷹航空通用裝備有限責任公司)
光電吊艙相當于無人機的“眼睛”,為了保證“視線”的平穩,設計了雙速度環控制結構,并采用自抗擾控制(ADRC)方法.經仿真驗證,該技術能夠使光電吊艙視軸穩定精度得到提高。
光電吊艙是一種可以有效隔離載機擾動,保持光電載荷視軸穩定的裝置,其裝備于各型無人機上,主要功能是獲取載體外特定目標的穩定圖像。
在光電吊艙系統中,視軸穩定技術十分重要。視軸穩定與否在于對平臺所受各類擾動的抑制是否有效,提高平臺對擾動的抑制能力,即可提高視軸的穩定精度。本文從兩軸兩框架光電吊艙入手,設計基于“主動抗擾”的控制算法,將自抗擾控制技術應用于光電吊艙控制系統,對系統的外部擾動進行總體觀測和抑制,從而可靠地提高平臺的視軸穩定能力。
在光電吊艙控制系統中,速率穩定回路是實現視軸穩定功能的重要回路,對該回路的設計十分重要。由于單速度環的設計難以滿足功能要求,對速度調節器的性能要求也較高,因此,本文設計雙速度環串級結構,將不同類別的擾動進行隔離,分別設計控制器進行消除,避免各種擾動因素的互相影響。

兩款某型無人機的光電吊艙。
兩軸兩框架光電吊艙的結構
無人機的機械接口與光電吊艙的方位軸結合,軸上裝有同軸連接的方位驅動電機和方位測角旋變;方位軸下方吊掛光電吊艙的方位框架,方位框架內裝有俯仰框架;在俯仰框架上,為了平衡平臺質量,俯仰測角旋變和俯仰驅動電機分裝于俯仰軸的兩端,其定子固定于方位框架兩側;在俯仰框架內部固定著可見光成像系統和紅外夜視成像系統。
自抗擾穩定控制器
自抗擾控制器是以經典PID控制器的思想為基礎,結合現代控制理論而提出的一種觀測和補償相結合的非線性控制器。以應用于無人機光電吊艙控制系統的二階自抗擾穩定控制器為例,其模型可以分為跟蹤微分器(TD)、擴張狀態觀測器(ESO)和狀態誤差反饋控制律(SEF)三部分。
擴張狀態觀測器是自抗擾控制器的核心部分,利用擴張狀態觀測器能夠將系統的內部擾動和外部擾動進行實時觀測,再經過跟蹤微分器對系統相關信號進行合理提取,通過非線性反饋控制得到系統的控制量,實現良好的控制性能。在該控制過程中,自抗擾控制器并不依賴被控對象,即不依賴于光電吊艙系統的精確模型。此外,擴張狀態觀測器的引入可以將不同擾動成分不加區分地進行觀測,能夠更有效地解決無人機平臺中各類擾動因素復雜多樣的問題,規避了光電吊艙系統的不確定性等問題,能夠達到無人機光電吊艙所要求的抗擾性能指標。
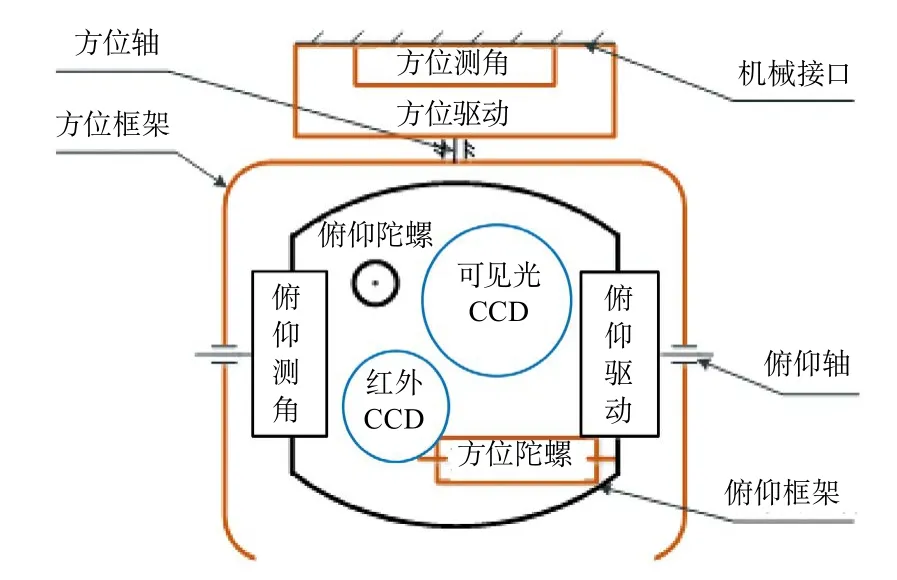
(左)兩軸兩框架光電吊艙結構簡圖。
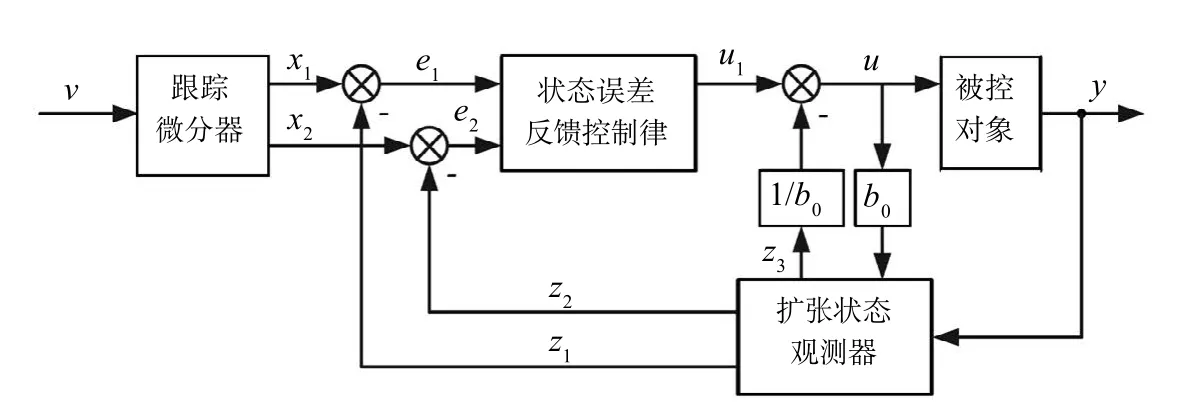
(右)二階自抗擾控制器原理圖。
光電吊艙雙速度環控制結構
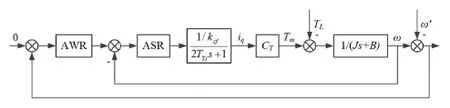
(上) 雙速度環控制系統的結構框圖。
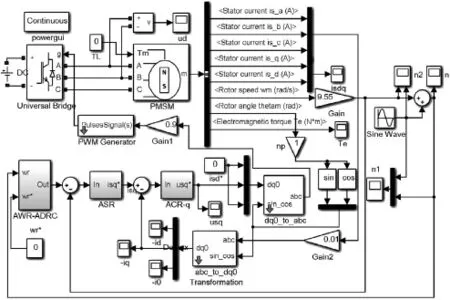
(下)雙速度環控制系統Simulink仿真模型。
從控制結構上分析,單速度環控制結構存在無法協調抑制不同種類擾動和低速穩定性差的缺點。本文在合理分析速度環的基礎上,設計基于陀螺反饋信號的穩定環,形成雙速度環的串級結構,實現合理抑制速率擾動和力矩擾動的控制結構。從控制策略上,由于系統各部分模型的非線性,系統的精確模型難以建立,通常依靠模型精確參數的控制方法較難達到理想的控制效果,因此,本文引入自抗擾控制器,將控制系統閉環內的擾動不加區分,直接觀測并合理提取,從而將系統模型不精確的影響降至最低。采用雙速度環結構后,控制系統的結構框圖有所變化。
光電吊艙中,速度環和穩定環在系統的擾動抑制過程中起著關鍵作用,本文將自抗擾控制器應用于穩定環,同時對比傳統的PI控制器,驗證該控制結構對視軸穩定精度提高的有效性。
光電吊艙控制系統仿真模型
本文利用MATLAB/Simulink仿真軟件對光電吊艙控制系統中的自抗擾控制算法進行仿真,并分析控制策略的可行性,得出合理的控制參數。根據光電吊艙控制系統模型,搭建某一框吊艙伺服系統的Simulink仿真模型。在該模型中,電流環、速度環和穩定環構成三閉環控制系統,其中速度環和穩定環構成串級控制結構,穩定控制器采用上文設計的自抗擾穩定控制器。為了與單速度環控制系統進行對比分析,同時搭建由電流環和穩定環構成的單速度環閉環控制結構的Simulink仿真模型。
在雙速度環控制系統的Simulink仿真模型中,穩定環控制器是基于自抗擾控制器設計的,其中的跟蹤微分器、擴張狀態觀測器和狀態誤差反饋控制律采用S-函數編寫,作為對比,PI穩定控制器的參數按“二階最佳”原則進行整定。
光電吊艙控制系統仿真分析
根據視軸穩定的機理,在實際運行中需設定光電吊艙各軸的角速度給定值為0。實際中擾動因素成分復雜,為分別驗證控制系統對復雜擾動成分的抑制能力,首先設定系統的擾動為一定頻率的正弦力矩擾動。根據工程實際中的擾動成分,設置該正弦力矩擾動頻率為5Hz、幅值為10%伺服電機額定轉矩。仿真中觀察吊艙某軸的角速度波形,對兩種控制系統的控制效果進行對比分析,通過對波形的定性分析,對系統的擾動隔離度進行評價。
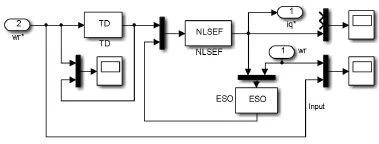
自抗擾穩定控制器Simulink仿真模型。
由仿真波形可知,在正弦力矩擾動的作用下,兩種控制系統均可將力矩擾動隔離,實現速率穩定。雙速度環控制系統的控制效果波形,與單速度環控制系統相比,前者的擾動隔離度更高,視軸穩定效果更好。
(上)針對力矩擾動的控制系統仿真波形。
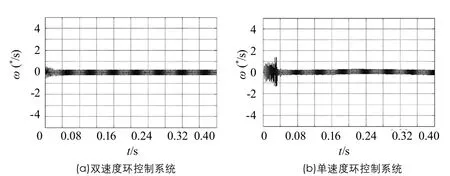
(中) 針對速率擾動的控制系統仿真波形。
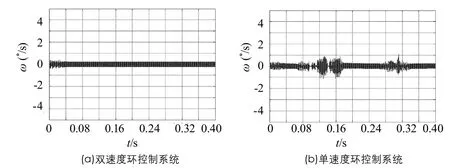
(下)突加力矩擾動仿真波形。
再設定系統的擾動為一定頻率的正弦速率擾動。參考工程實際,設置該正弦速率擾動頻率為2.5Hz、幅值為20°/s。仿真中亦觀察吊艙某軸的角速度波形,對兩種控制系統的控制效果進行對比分析。
由仿真波形可知,在正弦速率擾動的作用下,兩種控制系統均可將速率擾動隔離。對比波形可知,雙速度環控制系統的擾動隔離度更高,視軸穩定效果較好,經計算其擾動隔離度在1%以內,而后者的動態調節過程中,擾動隔離度大于5%,擾動隔離度較低。
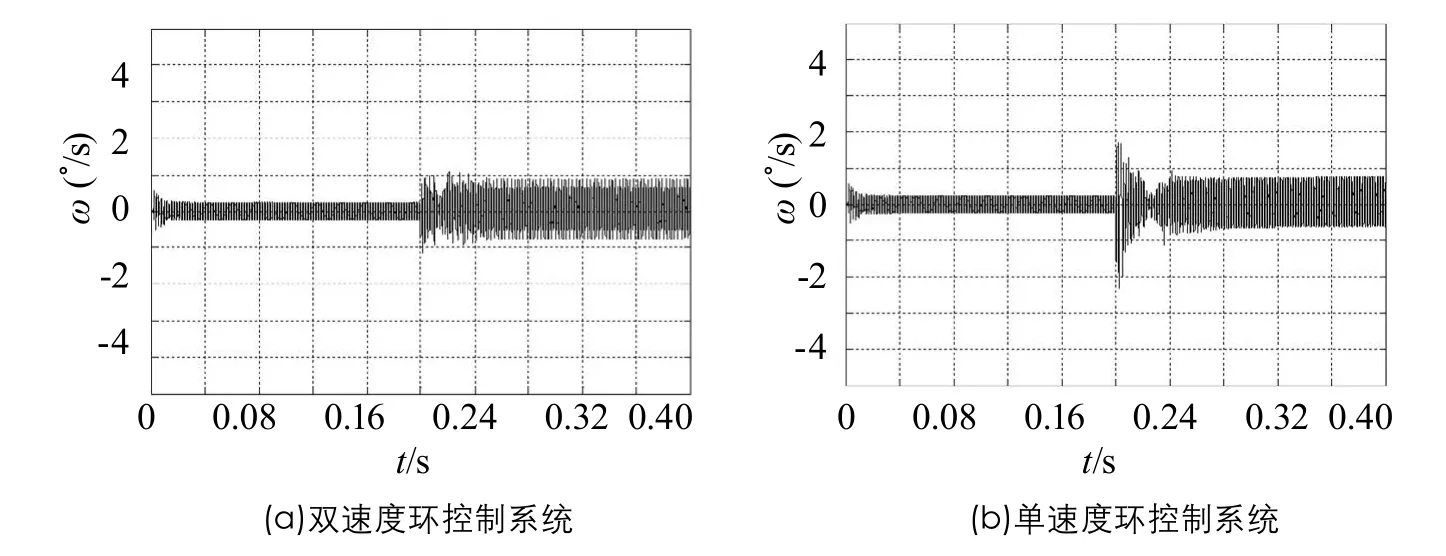
光電吊艙系統中擾動的成分復雜,擾動作用的形式多樣,其中包括穩定運行時突加擾動的情況。為驗證控制系統對突加擾動的響應速度和抑制能力,在仿真中設定擾動為幅值為25%伺服電機額定轉矩的階躍力矩擾動,觀察吊艙的角速度波形,驗證兩種控制系統對突加力矩擾動的抑制效果,包括擾動抑制的快速性和平穩性。
由仿真波形可知,在0.20s突加力矩擾動時,雙速度環速度控制系統在0.02s的時間內實現擾動抑制,且調節過程平穩,最大轉速波動在1.1°/s內。對比單速度環速度控制系統,有明顯的調節過程,且調節過程中轉速波動已達1.8°/s,波動較大。
本文分析設計的雙速度環控制系統的目的是針對速率擾動和力矩擾動的特性,分別對其進行抑制。為了驗證速度環對力矩擾動具有隔離效果,將速率擾動和力矩擾動同時加入控制系統,觀察吊艙的角速度波形。
對比突加力矩仿真波形可知,雙速度環控制系統能夠在有力矩擾動和速率擾動共同作用時實現平臺視軸的穩定,而單速度環控制系統在運行過程中會有明顯的角速度波動,進而影響視軸的穩定精度。
速度控制器不僅需要滿足抗擾的要求,而且能夠快速跟蹤給定且超調盡量小,使控制系統具有快速響應能力。為驗證雙速度環控制系統和自抗擾穩定控制器的響應能力,在仿真中設置穩定環控制器給定為階躍角速度信號,觀察吊艙某軸的角速度對給定的跟蹤情況。
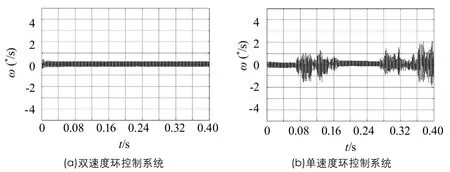
(左)同時加入速率和矩擾動仿真波形。
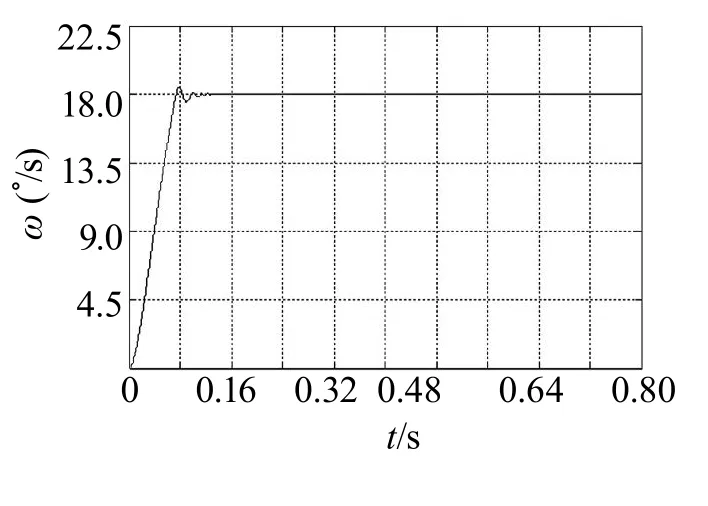
(右)穩定環階躍響應仿真波形。
從仿真結果看出,在給定幅值為18°/s的階躍角速度時,雙速度環速度控制系統的響應效果較好,在80ms的時間內即達到給定轉速,計算得伺服電機的平均角加速度達到225°/s2,滿足系統對穩定回路快速性的要求。
以上仿真結果表明,雙速度環速度控制系統能夠有效實現對力矩擾動和速率擾動的隔離,穩定吊艙的視軸,驗證了控制系統結構和參數的合理性,且穩定效果較傳統的單速度環速度控制系統有較大的優勢。
結束語
本文以無人機光電吊艙控制系統為研究對象,從控制系統結構和控制方法兩方面進行了分析,提出了雙速度環的控制結構,并針對系統中擾動的特性和作用方式引入了自抗擾穩定控制器,通過仿真和試驗驗證,實現了提高無人機光電吊艙視軸穩定精度的目的,對無人機偵察能力的增強具有積極有效的作用。 ■
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19