多視幾何理論輔助的無人機低空攝影測量空三加密
2017-07-05 15:23:16蘇天路彭官輝楊化超
測繪通報 2017年6期
陳 登,林 卉,蘇天路,彭官輝,楊化超
(1. 中國礦業(yè)大學環(huán)境與測繪學院,江蘇 徐州 221116; 2. 江蘇師范大學測繪學院,江蘇 徐州 221008)
?
多視幾何理論輔助的無人機低空攝影測量空三加密
陳 登1,林 卉2,蘇天路1,彭官輝1,楊化超1
(1. 中國礦業(yè)大學環(huán)境與測繪學院,江蘇 徐州 221116; 2. 江蘇師范大學測繪學院,江蘇 徐州 221008)
為降低無人機飛行姿態(tài)較差對后續(xù)空三數(shù)據(jù)處理的影響,將計算機視覺多視幾何理論引入傳統(tǒng)攝影測量,將其三維數(shù)據(jù)處理結(jié)果作為攝影測量空三加密的初始數(shù)據(jù),以提高空三加密的精度和可靠性。不同地面分辨率和不同地形特征的多個測區(qū)試驗證明了所提方法的正確性,為實際應用提供了理論和實踐參考。
多視幾何;無人機;攝影測量;空三加密
解析空中三角測量(又稱攝影測量加密)是攝影測量內(nèi)業(yè)測圖和數(shù)字產(chǎn)品生成的第一道工序,其核心內(nèi)容是以像片上的像點坐標為依據(jù),用攝影測量的方法求解測區(qū)中所有影像的外方位元素,并基于攝影過程的幾何反轉(zhuǎn),重建可量測的幾何立體模型,然后解求出地面點的空間坐標[1]。由于無人機有作業(yè)費用低廉、作業(yè)方便及受氣候條件限制少等優(yōu)點,已廣泛應用于攝影測量、土地用途調(diào)查等諸多領(lǐng)域。但是,無人機由于重量較輕,體積小,非常容易受氣流干擾,飛行穩(wěn)定性較差,航線保持較困難[2]。所拍攝的航攝影像相對于常規(guī)航空攝影像片旋偏角大、航線彎曲度大、影像重疊度不規(guī)則等,從而導致無人機機載POS系統(tǒng)定位定姿偏差較大[3],尤其在用于精度要求較高的大比例尺航空攝影測量領(lǐng)域時,其后續(xù)攝影測量空三加密成果的精度將會受到不同程度的影響[4],是失敗。
20世紀80年代后期興起的GPS輔助空中三角測量技術(shù)[5]可大量減少甚至完全不使用地面控制點來進行攝影測量加密,以獲取航測成圖所需的圖根控制點。盡管基于差分GPS定位(DGPS)[6]的空中三角測量技術(shù)在常規(guī)航空攝影測量中已被廣泛應用,在我國的傳統(tǒng)航測4D產(chǎn)品生產(chǎn)和西部測圖困難區(qū)域的地形測繪中發(fā)揮了重要作用,但對于低空攝影測量數(shù)據(jù)的處理尚處于實驗階段,且DGPS系統(tǒng)的引入增加了系統(tǒng)成本、野外基站的布設及測量方面的工作。另一方面,GPS接收機在無人機高速飛行條件下容易發(fā)生信號失鎖或周跳,定位結(jié)果易受影響[7]。
源于計算機視覺領(lǐng)域的多視幾何(multiple-view geometry)[8]與傳統(tǒng)攝影測量在很多方面有極大的相似性。多視幾何由于對初始條件要求很低,因此對硬件條件及數(shù)據(jù)獲取條件要求也很低。然而,多視幾何理論與傳統(tǒng)攝影測量理論并不完全一致,兩者仍存在一定的差異。如何將多視幾何理論引入傳統(tǒng)攝影測量加密,使多視幾何理論彌補傳統(tǒng)攝影測量理論的不足與局限性,無疑具有重要的實踐意義。
1 多視幾何理論輔助的空三加密
1.1 二者的差異
在已標定相機的前提下,給出攝影測量和多視幾何的技術(shù)流程,如圖1所示。
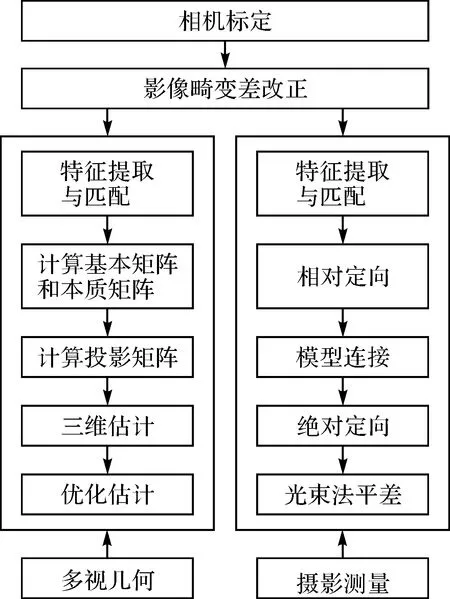
圖1 多視幾何與攝影測量空三加密技術(shù)流程
由圖1可以看出,多視幾何與傳統(tǒng)攝影測量的基本目的是一致的,即都是通過二維序列影像重建三維模型(相關(guān)技術(shù)細節(jié)詳見文獻[9],在此不再贅述)。但二者也存在一定的差異,從對最終測量成果精度的影響來看,主要包括:
(1) 算法差異:由于攝影測量源于測繪學科,測量數(shù)據(jù)處理方法——最小二乘迭代求解幾乎貫穿于攝影測量的全過程;而計算機視覺更強調(diào)矩陣分解,總是設法將非線性問題轉(zhuǎn)化為線性問題,盡可能避免求解非線性方程。因而,攝影測量較多視幾何具有更高的定位精度。
(2) 初始數(shù)據(jù):攝影測量利用最小二乘原理進行求解,因此所求未知數(shù)必須具有良好初始值。這些初始值通常與飛機拍攝瞬間的姿態(tài)和方向有關(guān),而無人機機載POS定位定姿系統(tǒng)通常偏差較大,從而造成非線性最小二乘求解的困難;而多視幾何理論并不要求未知數(shù)具備初始值,因為多視幾何理論的已知數(shù)據(jù)僅需要影像上特征像點的像素坐標。
(3) 像點坐標觀測值精度:多視幾何中的立體影像匹配技術(shù)成果頗豐,但大多強調(diào)匹配結(jié)果的穩(wěn)健性,如新近發(fā)展的基于塊匹配技術(shù)的多視立體(patch-based multi-view stereo)[10],這些匹配方法在精度上尚低于如攝影測量領(lǐng)域所常用的最小二乘匹配技術(shù)。
基于以上的分析可知,多視幾何技術(shù)對影像拍攝位置和方向無需嚴格約束,具有很好的魯棒性和穩(wěn)健性,其優(yōu)化結(jié)果恰好為攝影測量加密提供了良好的初始數(shù)據(jù)。這也是二者可進行有效融合的理論和現(xiàn)實基礎(chǔ)。
1.2 多視幾何理論輔助的空三加密
傳統(tǒng)攝影測量加密采用理論較為嚴密的光束法區(qū)域平差,其使用的函數(shù)模型為共線方程
(1)
式中,(u,v)為像點坐標;(u0,v0)為像主點坐標;f為相機焦距;(X,Y,Z)為像點對應的物方空間點坐標;(XS,YS,ZS)為相機外方位元素的3個線元素;ai、bi、ci(i=1,2,3)為外方位元素的3個角元素(φ,ω,κ)構(gòu)成的旋轉(zhuǎn)矩陣。
式(1)線性化后得到
V=At+BX-L
(2)
式中
t=[dXSdYSdZSdφdωdκ]T;X=[dXdYdZ]T。其他各項參數(shù)的含義詳見文獻[11]。式(2)的求解需要良好的初始值,可以通過多視幾何技術(shù)獲得,如下。
設以齊次坐標表示的空間點為Si(Xi,Yi,Zi,1),投影點為si(ui,vi,1),投影矩陣為P,則有
(3)
投影矩陣P包含11個自由變量,又可分解成為旋轉(zhuǎn)矩陣R、平移矩陣T和相機檢校矩陣K
P=K[RT]
(4)
式中,λi為比例因子。
式中,f為相機焦距;s為透鏡畸變參數(shù);Tx、Ty、Tz為投影中心在世界坐標系下的坐標分量,其他參數(shù)的含義同式(1)。
基于式(3)的結(jié)果可為式(2)提供待求參數(shù)初始值。更進一步的,式(3)的結(jié)果還可以再迭代優(yōu)化。
不失一般性,假設攝影測量區(qū)域網(wǎng)(計算機視覺一般稱之為影像場景)中共有n個三維空間點在m張相片中可見并令xij為第i個像點在第j張影像上的像點坐標,設定一個二進制變量vij,如果第i個像點在第j張影像上可見,則vij=1,否則vij=0;令aj表示相機參數(shù),bj表示一個三維空間點,則多視幾何采用的光束法平差即是按下式最小化通過三維空間點和相機參數(shù)計算得到的像點的重投影誤差
(5)
式中
Mj=[XSjYSjZSjφjωjκj]T(j=1,2,…,m);Ni=[XiYiZi]T(i=1,2,…,n);d(x,y)表示向量x和y之間的歐氏距離;Q(Mj,Ni)表示第i個像點在第j張影像上的重投影坐標,采用式(3)計算。實際應用中,可以基于式(3)或式(5)的結(jié)果為式(2)提供待求參數(shù)初始值。
2 試 驗
2.1 試驗數(shù)據(jù)及軟件系統(tǒng)
選擇了不同地面分辨率及不同地形特征的3塊區(qū)域(簡記為A、B、C)開展試驗(詳見表1)。A區(qū)域為平坦地形,地面高程約為45 m,共3條航帶30張影像,覆蓋面積約1.3 km2,布設了24個像控點,其中10個為檢查點;B區(qū)域為丘陵地形,地面高程1300~1500 m,共8條航帶392張影像,覆蓋面積約10 km2,布設了38個像控點,其中11個為檢查點;C區(qū)域為高山地地形,地面高程1300~2100 m,共14條航帶520張影像,覆蓋面積約16.5 km2,布設了72個像控點,其中18個為檢查點。各區(qū)域航線布設及像控點分布如圖2所示,圖中三角形為像控點,圓形為檢查點,其余為航點。3個測區(qū)的無人機航攝參數(shù)見表1。

表1 3個測區(qū)的無人機航攝參數(shù)
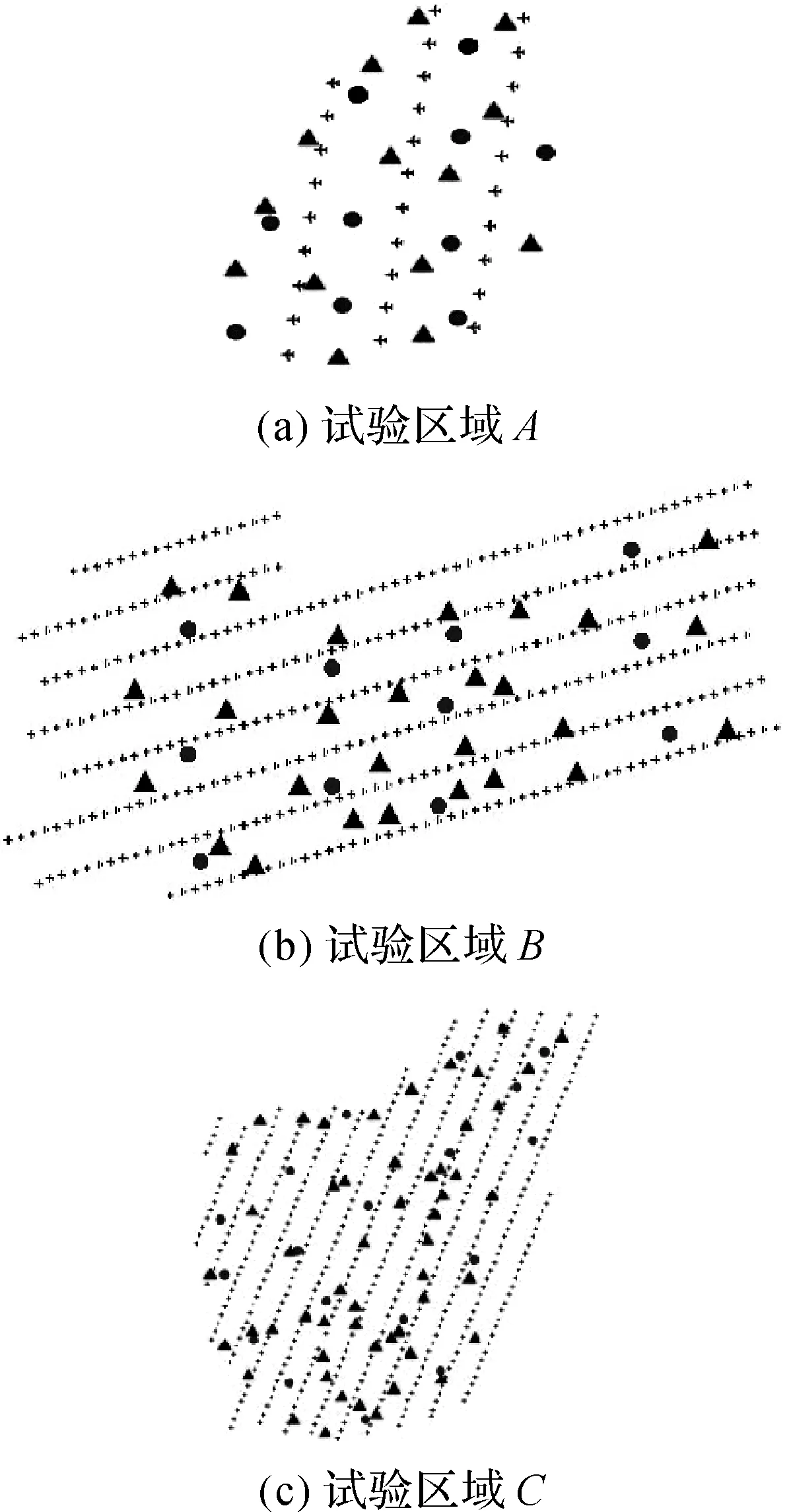
圖2 各區(qū)域航線布設及像控點分布
多視幾何和攝影測量加密算法分別選用目前使用較為廣泛的Agisoft PhotoScan[12]和Inpho[13]軟件系統(tǒng)。PhotoScan基于計算機視覺最新的多視圖三維重建技術(shù)對序列立體影像進行全自動化的處理,也可以通過給予的控制點生成測量坐標系統(tǒng)下的真實坐標的三維模型[14]。Inpho對于各種航空框幅式相機、數(shù)字框幅式CCD相機、推掃式ADS40相機甚至無人機承載的數(shù)碼相機等獲取的影像均可實現(xiàn)完全自動化的高效空三處理,其用于空三加密處理的模塊為MATCH-AT,該模塊采用光束法區(qū)域網(wǎng)平差模型進行平差解算,其自動化的最小二乘匹配技術(shù)精度較高[15]。
2.2 試驗結(jié)果及分析
圖3和圖4分別給出了各區(qū)域采用方案1和方案3空三結(jié)果的圖形顯示;表2給出了方案1和方案3空三外方位差值統(tǒng)計;表3給出了各區(qū)域采用方案1和方案2和方案3的檢查點立體量測精度統(tǒng)計;圖5所示為試驗區(qū)域A檢查點高程誤差統(tǒng)計折線圖(分析X、Y坐標誤差分布,具有類似規(guī)律,因篇幅所限,這里未全部繪出)。

圖3 各區(qū)域方案1的空三結(jié)果
以上試驗結(jié)果表明:
(1) 方案1(基于PhotoScan的攝影測量加密)得到的外方位元素與方案3(多視幾何輔助的攝影測量空三加密)得到的外方位元素比較接近。兩種方案獲得的線元素差值均小于1 m,角元素差值均小于0.1°,因此將方案1得到的結(jié)果作為方案3的初始值具有很高的精度。
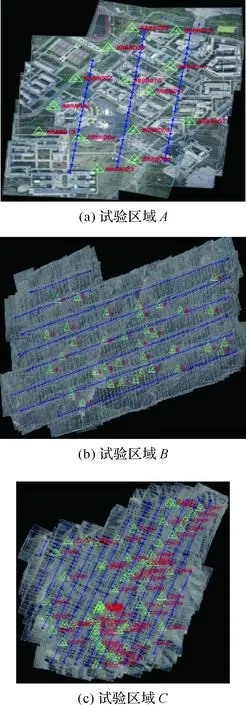
圖4 各區(qū)域方案3的空三結(jié)果
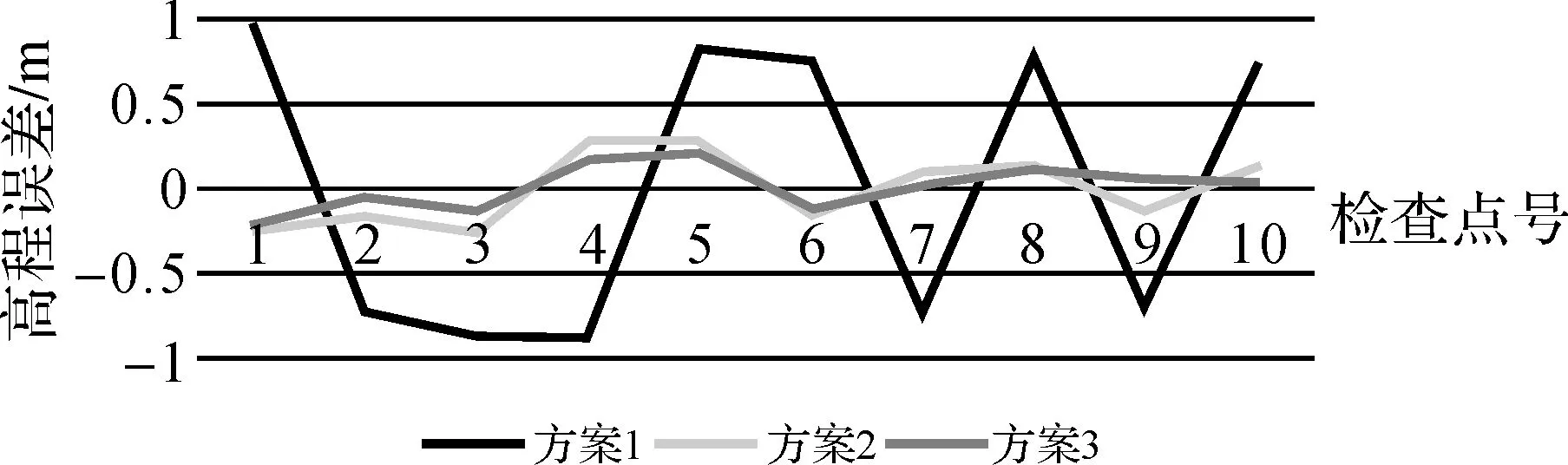
圖5 試驗區(qū)域A檢查點高程誤差統(tǒng)計折線圖
(2) 針對各區(qū)域檢查點立體量測精度,比較方案1和方案3可以看出方案3精度更高。對于試驗區(qū)域B和C,方案2(基于Inpho的攝影測量空三加密)結(jié)果失敗,可以看出方案3可靠性更高。
(3) 從圖5可以看出,對于試驗區(qū)域A,方案1得到的檢查點高程誤差較大,比較方案2和方案3可以看出方案3得到的檢查點高程誤差較小,因此方案3空三加密精度更高。
3 結(jié) 語
多視幾何理論及其技術(shù)的發(fā)展為傳統(tǒng)攝影測量領(lǐng)域提供了新的發(fā)展方向,針對無人機本身質(zhì)量輕、載荷低,自帶的POS數(shù)據(jù)精度不高等問題,其后續(xù)攝影測量空三加密成果的精度將會受到不同程度的影響,甚至失敗。本文提出了將多視幾何理論引入傳統(tǒng)攝影測量的方案,采用不同地面分辨率和不同地形特征的多個測區(qū)試驗,結(jié)果表明該方案能提高無人機低空攝影測量空三加密的可靠性和立體量測精度。

表2 方案1和方案3空三外方位差值統(tǒng)計

表3 各區(qū)域檢查點立體量測精度統(tǒng)計
注:“—”表示空三加密失敗。
[1] 楊莉. POS輔助下Inpho軟件空三加密研究及精度分析[J]. 科技創(chuàng)新導報, 2013(11):25-26.
[2] 廖永生,周宏霞. DGPS差分定位系統(tǒng)應用于低空攝影測量無人機氣動參數(shù)計算[J]. 測繪與空間地理信息, 2011, 34(1):121-123.
[3] 任志明,李永樹,何敬,等. 基于姿態(tài)數(shù)據(jù)的無人機影像自動刺點功能研究[J]. 測繪通報, 2011(4):44-46.
[4] 程婷婷,方源敏,賈培哲.提高我國西南地區(qū)空三加密精度的幾種方法[J]. 測繪與空間地理信息, 2014(4):216-218.
[5] 石平,張文安. IMU/GPS輔助航空攝影測量技術(shù)方法應用研究——以貴陽市航空攝影測量項目為例[J]. 測繪通報, 2016(1):88-90.
[6] GUO D H, WU L X, WANG J C, et al. The Application of IMU/DGPS-supported Photogrammetry[J]. Remote Sensing for Land & Resources, 2006, 18(1):51-55.
[7] 韓厚增,王堅,李增科. GPS/INS緊組合的INS輔助周跳探測與修復[J]. 測繪學報, 2015, 44(8):848-857.
[8] ANDREW A M. Multiple View Geometry in Computer Vision[J]. Kybernetes, 2001, 30(9/10):1865 - 1872.
[9] 鄧非,張祖勛,張劍清. 基于序列影像的城市三維建模[J]. 計算機工程, 2007, 33(8):208-209.
[10] SHEN S. Accurate Multiple View 3D Reconstruction Using Patch-based Stereo for Large-scale Scenes[J]. IEEE Transactions on Image Processing, 2013, 22(5):1901-1904.
[11] 吳巍,魏富恒,高振東,等. 基于四元數(shù)的共線條件方程線性化[J]. 測繪科學, 2009(S2):94-95.
[12] 張小宏,趙生良,陳豐田.Agisoft photoscan在無人機航空攝影影像數(shù)據(jù)處理中的應用[J]. 價值工程, 2013(20):230-231.
[13] MA D L, CUI J, DING N. The Making of Digital Orthophoto Map Based on INPHO[J]. Applied Mechanics & Materials, 2011, 90-93:2818-2821.
[14] 李秀全,陳竹安,張立亭.非量測相機影像三維模型構(gòu)建及精度檢驗[J]. 測繪科學, 2016, 41(6):144-147.
[15] 黎治坤,鄭史芳,劉銳,等.幾種無人機正射影像處理軟件的比較[J].測繪通報,2016(6):82-86.
UAV Aerial Triangulation for Low-attitude Photogrammetry Assisted by Multi-view Geometry Theory
CHEN Deng1,LIN Hui2,SU Tianlu1,PENG Guanhui1,YANG Huachao1
(1. School of Environment Science and Spatial Informatics, China University of Mining and Technology, Xuzhou 221116, China; 2. School of Geodesy and Geomatics, Jiangsu Normal University, Xuzhou 221008, China)
In order to reduce the influence of poor UAV flight attitude on subsequent aerial triangulation data processing, computer vision multi-view geometry theory is introduced into traditional photogrammetry, and its 3D data processing result is taken as initial data for aerial triangulation encryption in photogrammetry to improve the accuracy and reliability of aerial triangulation encryption. The accuracy of the proposed method is proved by the multi-zone test with different ground resolutions and different topographic features, which provides theoretical and practical reference for practical application.
multiple-view geometry; UAV; photogrammetry; aerial triangulation
陳登,林卉,蘇天路,等.多視幾何理論輔助的無人機低空攝影測量空三加密[J].測繪通報,2017(6):26-30.
10.13474/j.cnki.11-2246.2017.0183.
2017-02-23;
2017-04-12
國家自然科學基金(41371438)
陳 登(1993—),男,碩士,主要研究方向為攝影測量與三維建模。E-mail: chendenglxtx@126.com
林 卉。E-mail:linhuixznu@126.com
P23
A
0494-0911(2017)06-0026-05
猜你喜歡
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發(fā)展導向(2019年10期)2019-08-24 06:25:28
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21