故障現象矢量距離判別方法在收割機故障診斷中的應用*
2017-07-05 15:22:56楊俊凱徐云杰
網絡安全與數據管理 2017年12期
楊俊凱,徐云杰
(湖州師范學院 工學院,浙江 湖州 313000)
?
故障現象矢量距離判別方法在收割機故障診斷中的應用*
楊俊凱,徐云杰
(湖州師范學院 工學院,浙江 湖州 313000)
為了更快診斷收割機故障,實施故障預警,提升故障排除速度,應用基于故障現象的矢量距離判別方法,解決收割機因隨機影響因素過多導致診斷困難的問題。通過研究收割機故障現象空間發現,每一種故障現象的出現均服從0~1分布,每種故障對應的故障現象矢量會自然形成以各自故障現象矢量期望為聚點的聚類,用系統聚類分析對原始故障現象進行分類,再用距離判別法對新加入故障現象確定其類別歸屬并將結果反饋到數據庫,實現系統實時診斷經驗的自學習。利用蒙特卡洛方法進行編程,證明了這種診斷方法實時性好、算法簡單和診斷準確率高。
收割機故障;故障現象矢量;距離判別;故障診斷
0 引言
堵塞故障是收割機最常見的故障,因此國內外在這方面研究較多。國外的堵塞故障診斷與報警系統的研究已非常成熟,并廣泛裝備到聯合收割機上[1-2]。例如 John Deere、凱斯、紐荷蘭、CLASS 等品牌收割機都裝備高性能的故障診斷監控系統。國內這方面還未達到成熟階段,陳進、汪鳳珠等人[3-5]在堵塞故障診斷上都取得了一定的成果。中國農業大學、中國農業機械化科學研究院等在故障診斷等方面也做了研究[6]。堵塞故障診斷的目的是控制收割機性能參數的調整或預警。與堵塞故障診斷不同,收割機機械部件一旦發生磨損、變形、碎裂等故障,只能進行人工更換,機械部件故障診斷的目的是找到故障點或提前預警,目前針對收割機機械部件的故障診斷研究還較少。
聯合收割機機械部件故障診斷的實質是尋找一個故障現象空間到故障空間的映射。為了準確地找到最大限度的空間,常采用專家系統、BP神經網絡、模糊算法、DS 證據理論和遺傳算法等的智能診斷方法[7-8]。專家系統知識獲取難,BP神經網絡知識推理能力弱,模糊算法以串行推理為主知識獲取能力較弱,DS證據理論證據沖突較大時,存在一票否決現象,遺傳算法具有對網絡或樣品的訓練收斂速度慢的缺點[8],因此單獨使用一種是很難完成具有較高的診斷實時性要求的任務。L-M算法可以克服這個缺點,但提高了計算的復雜性和設計難度[8]。基于模糊理論的故障診斷專家系統可以描述系統的模糊狀態,基于規則簡單的設計可實現傳統的故障診斷專家系統[9]。但基于規則的專家系統有規則的制定和知識獲取兩個瓶頸問題[10-11]。解決規則制定和解決復雜規則的策略容易返回到神經網絡和遺傳算法的復雜算法問題時,使問題變得復雜了。機器學習能夠有效地解決知識獲取的問題,但機器學習容易引發組合爆炸。通過研究故障現象的概率分布和由故障集群引起的聚類特性,本文將距離判別方法用于機械故障診斷,將診斷結果反饋到故障數據庫,提供了很好的解決方案,解決了傳統的基于規則的專家系統的兩個問題,使復雜的系統結構和軟件設計難度大大降低,診斷效率和工程實用性大大增強。
1 建立故障模型
1.1 故障矢量現象的數學表示法
造成谷物聯合收割機常見故障的原因主要包括機器零部件的正常磨損、事故性故障、維修(安裝)調整不正確和使用、調整不當造成的故障四個方面。統計顯示,造成故障的原因中因軸承內進入泥沙而引起軸承損壞、生銹以及鏈過松等非主要隨機因素引起的故障較多。故障現象和故障之間總體可以描述為:一個故障可能導致多個現象的發生;一個故障現象也可能是由不同的故障引發的;多個故障現象是不能肯定由哪一個故障引發的,但是都符合統計學。


1.2 專家系統模型的建立
診斷系統模型見圖1。
整個故障診斷系統是一個專家系統。它獲取并輸入一個故障現象矢量并根據距離判別規則和已有數據進行推理。推理機根據判別分析規則發出診斷結果即診斷概率分析表,其中最大概率故障是首選結果,有些則是通過減少概率順序選擇的。診斷概率分析表將進一步給維修人員提供確認參考。經確認的結果將反饋到數據庫故障記錄庫中,以備下次診斷參考。
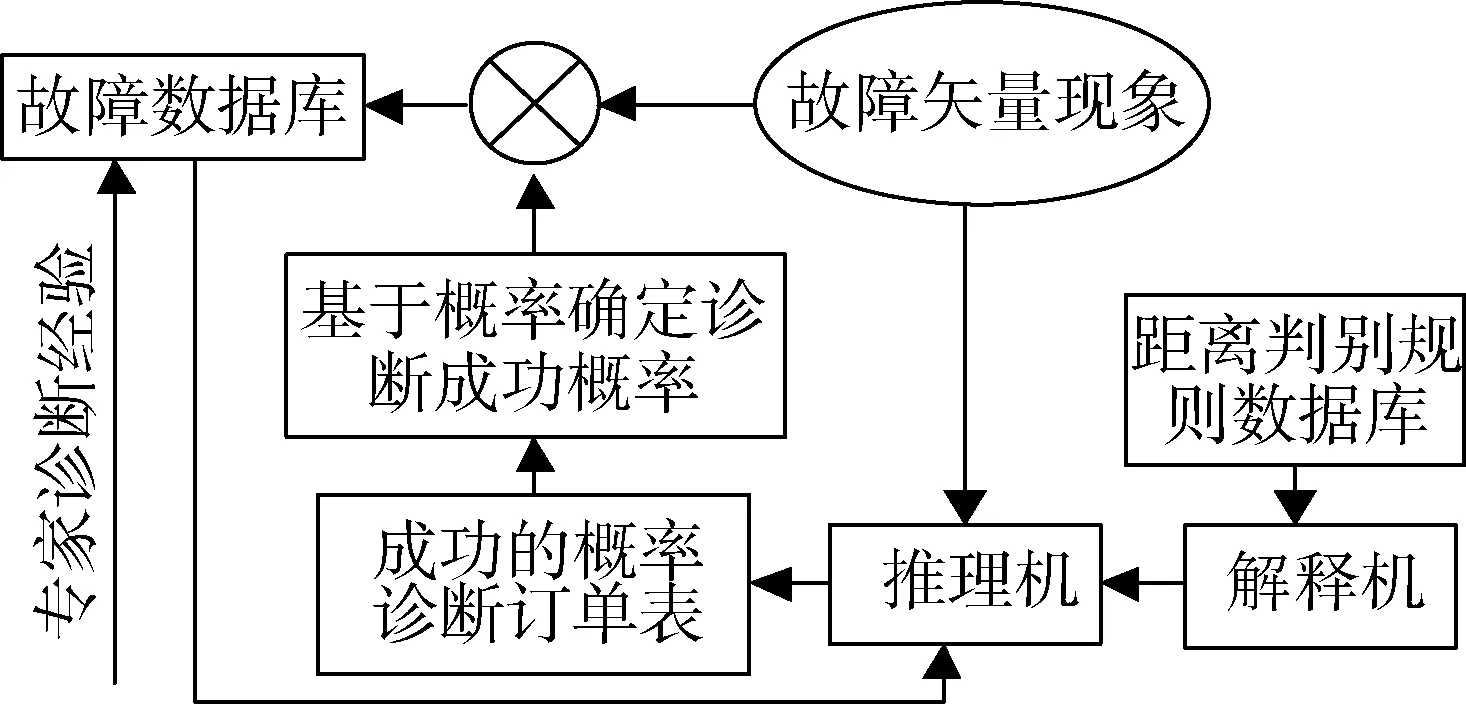
圖1 故障診斷專家系統模型
2 關鍵技術
2.1 推理規則的制定
制定規則需要解決設計故障數據表的問題。表1是F1的故障數據,其中每行代表一個故障現象矢量表。
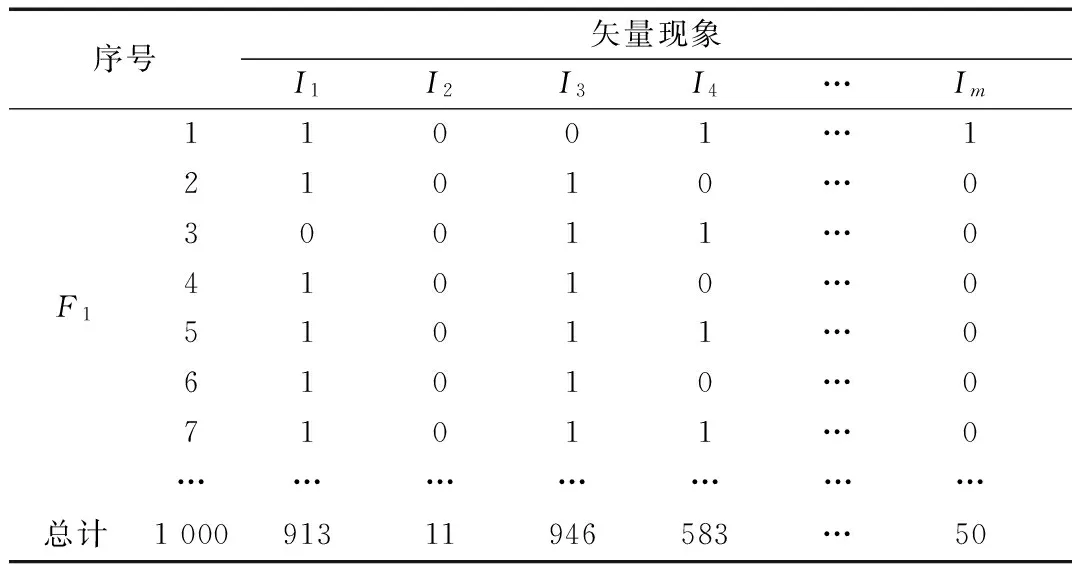
表1 F1數據表
用上述方法,能夠為每個Fi創建故障數據表。每個故障現象均服從標準的0~1分布,數學表達式見式(1)。每個現象的期望是pij,其中i代表該現象是由第i個故障引起的,j表示這個現象顯示在第j個現象中,N為該故障的樣本數據量;Iijt表示故障i的t次故障現象矢量是由j次故障分量引起的。
(1)
方差為:
(2)
不同現象之間的協方差為:
(3)
其中,P(Iiuk,Iivk)是兩個故障現象,它只有四種聯合概率:
(4)


(5)

(6)

歐氏距離比較直觀,而馬氏距離結果比較可信。在實際應用中,馬氏距離需要知道的所有現象協方差矩陣的逆矩陣,涉及逆運算矩陣,所以相對復雜。
2.2 學習策略設計
當系統建成后,總結專家診斷經驗和輸入數據。在系統運行過程中自動學習,才能添加合適的故障現象矢量到故障數據庫。按概率由大至小進行排序可能會造成誤判,這意味著將最前面的診斷作為診斷結果可能是錯誤的,人不能完全控制這種判斷。如果數據庫中的數據是經驗非常豐富的數據,可降低誤判的可能性。系統會將誤判斷作為第二判斷,且作為失敗診斷概率輸出。
存儲形式影響問題解決效率,而調節和評估影響解決問題的準確性。故障和故障現象的匹配度可用式(7)表示。

(7)
其中,Ds為故障c與故障現象c′的匹配度;Wi是特征參數i的權重;n是所有癥狀的數量;Xi,Yi分別是故障c和故障現象c′的初始特征或結論可信度。如果Ds=1,表明故障和故障現象最為合適,即完全匹配;如果Ds=0,表明故障和故障現象完全不同,即不匹配。
當然,不是所有的經驗數據都是有效的。根據專家的經驗,故障現象矢量顯然是不符合一個故障現象對應一個故障的關系。如果直接去除異常數據,當系統遇到同類問題持續累積會導致系統產生重大問題。系統進行距離判別時,這些異常數據應排除在外,以免影響小概率判別使得分析異常。如果經常出現這種異常,異常的頻率自然會增大。根據異常的測定公式(8),它將不再處于異常的范圍。
(8)
其中,α是可以控制的異常辨別指數。
3 診斷算法設計
診斷算法流程如下:
(1)輸入故障現象進行診斷Dx=(d1,d2,…,dn)。
(2)對所有故障Fi,i=1,2,…,n,執行如下①~③:
①按步驟(1)計算向量Fi的期望;
②按式(8)對所有故障現象矢量Fi進行異常判別;
③使用所有異常向量,重新計算Fi期望。
(3)對于被診斷矢量Dx,每個故障都按式(5)或式(6)計算歐洲(或馬氏)距離Disi。
(5)按概率從小到大確認故障。
(6)確認結果反饋到故障數據表。
4 模型仿真
4.1 仿真算法設計

DFRk=nk/M
(9)
其中,nk是經過k次故障診斷后的矢量診斷頻率,M是診斷的總次數。
(10)

仿真算法如下:
(1)用蒙特卡洛法對所有故障樣本按故障現象矢量抽樣,每個故障產生N組樣本數據。
(2)使用隨機抽樣的方法,抽取一個故障x并建立一個故障現象矢量Dx。
(4)重復步驟(2)和步驟(3)m次。
4.2 仿真結果分析
取4LZ-4.5Z型履帶式谷物聯合收割機的六個典型旋轉故障,記為I1,I2,…,I6。該系統的故障現象及相應的分布參數見表2。
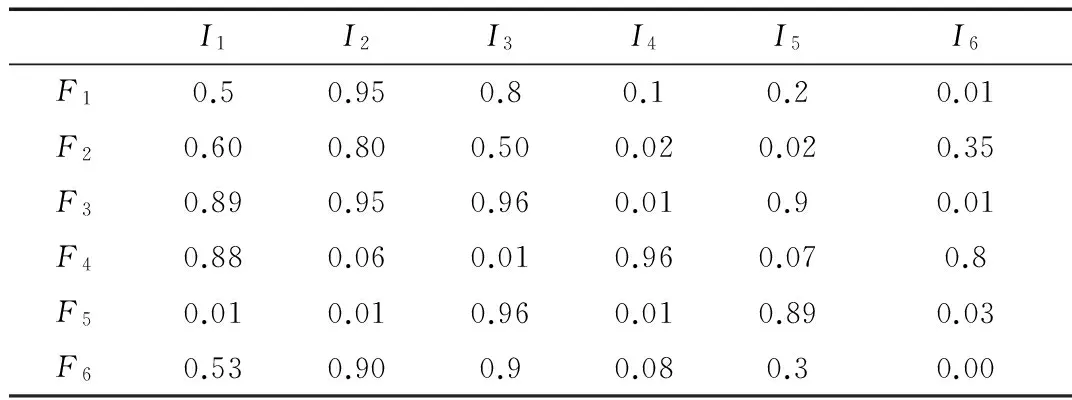
表2 系統分布參數和對應的現象
根據表2設計故障數據庫并進行仿真,使用歐幾里得幾何距離判別法進行距離判別。M=1 000,N=1 000,異常判別指標α=30。每個故障樣本生成1 000個故障向量并提取1 000個故障樣本仿真。輸出結果見表3和表4。

表3 排除異常的數目
由表3顯示的結果,每一個故障異常數量少,這與實際情況相符。在表4中第一次故障檢測率高達0.852。當k=2時即兩次累計診斷,成功率高達0.949,這意味著獨立故障的概率是兩個元素成功率高達0.949。原因是矢量故障參數F1和F6非常接近。從以上定義可以知道,這兩個故障可以作為一個模糊的群。目前,可以把它們作為一個故障,所以一次故障檢測率達到了0.949。數據結果分析表明,這種基于故障現象矢量判別診斷方法是有效的。
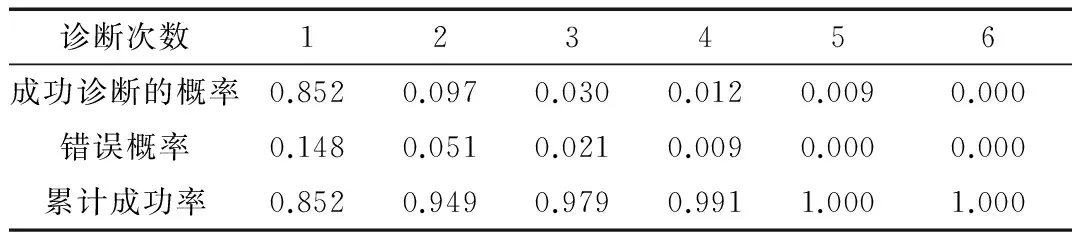
表4 診斷仿真結果
5 結論
本文提出了一種基于故障現象矢量判別分析的收割機機械系統故障診斷方法。從故障現象矢量的聚類特征出發,提出基于設計規則進行推理判別分析的思想,建立專家系統并排除異常現象。最后,模擬收割機例證表明,該診斷方法具有實時性好、操作簡單、診斷準確性高的特點。
[1] CRAESSAERTS G, BAERDEMAEKER J D, SAEYS W. Fault diagnostic systems for agricultural machinery[J]. Biosystems Engineering, 2010, 106(1):26-36.
[2] Nie Caili, Zhao Xiaoshun, Chen Huilian, et al. Development of fault diagnostic techni- que for modern agricultural machinery[J]. Journal of Agricultural Mechanization Research, 2007(9): 229-231.
[3] 陳進,龔麗霞,李耀明.基于FNN的聯合收割機故障診斷系統研究[J]. 中國測試, 2014,40(5): 77-79.
[4] 汪鳳珠,張俊寧,李瑞川,等.花生聯合收獲機作業在線監測與故障預警系統研究[J]. 農業機械學報,2015,46(增刊):69-73.
[5] 盧文濤,張莉杰,張東興,等.聯合收獲機監控系統研究現狀[J].農機化研究,2014,36(9): 256-259.
[6] 徐凱.基于BPNN與DS理論的聯合收割機堵塞故障診斷與報警系統[D].鎮江:江蘇大學,2016.
[7] 李云松,任艷君.智能診斷技術發展綜述[J].四川兵工學報,2010,31(4):122-125.
[8] 王建梅, 覃文忠. 基于 LM 算法的 BP 神經網絡分類器[J]. 武漢大學學報(信息科學版), 2005, 30(10): 928-931.
[9] 楊慧, 楊欣. 模糊灰關聯在 QAR 故障數據檢測中的應用[J]. 計算機工程與設計, 2015, 36(7): 1896-1899.
[10] 劉志華,吳韜,曹瑞明.基于DataSocket 技術的設備狀態監測與故障診斷系統[J]. 微型機與應用, 2015, 34(24): 84-87.
[11] 張美玲,胡曉. 基于LCD和改進 SVM 的軸承故障診斷方法[J]. 電子技術應用, 2016, 42(6): 81-83.
Application of fault phenomenon vector for distance discriminantmethod in harvester fault diagnosis
Yang Junkai, Xu Yunjie
(School of Technology, Huzhou University, Huzhou 313000, China)
In order to quickly diagnose harvester failure, advance early-warning fault and improve troubleshooting speed, the discrimination method for vector distance based on fault phenomenon is used to solve the problem that harvester is difficult to diagnose due to too many random factors. Each failure phenomenon is founded to obey the 0~1 distribution, and the fault phenomenon vector corresponding to each fault will naturally form clustering based on the vector expectation of the respective failure phenomenon as the clustering point. The original fault phenomenas are classified by systematic cluster analysis, the classification of new fault phenomena is identified by the distance discriminance and the results are fed back to the database, so the self-learning of real-time diagnostic experience is realized. The Monte Carlo method is applied to program, which can demonstrate that this method has good real-time performance, simple algorithm and high diagnostic accuracy.
harvester failure; fault phenomenon vector; distance discriminant; fault diagnose
TS210.1; S511
A
10.19358/j.issn.1674- 7720.2017.12.029
楊俊凱,徐云杰.故障現象矢量距離判別方法在收割機故障診斷中的應用[J].微型機與應用,2017,36(12):98-101,105.
湖州市公益性項目(2014GZB01)
2016-12-20)
楊俊凱(1983-),男,碩士,實驗師,主要研究方向:機電一體化。
徐云杰(1976-),通信作者,男,博士,副教授,碩士生導師,主要研究方向:林業機械智能化。E-mail:xyj9000@163.com。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21