北斗地基導航信號網絡測試方法研究
2017-07-05 14:19:14符京楊湯廷松
地理空間信息 2017年5期
關鍵詞:信號
符京楊,王 力,湯廷松,趙 娜,周 鋒
北斗地基導航信號網絡測試方法研究
符京楊1,2,王 力1,湯廷松2,趙 娜2,周 鋒2
(1.信息工程大學 導航與空天目標工程學院,河南 鄭州 450001;2.北京衛星導航中心,北京 100094)
為嘗試解決北斗衛星導航系統在特定區域因信號受遮擋而無法定位或定位精度較差的問題,引入了以偽衛星為基礎構成的北斗地基導航信號網絡。介紹了北斗地基導航信號網絡的系統組成和關鍵技術,提出了一套測試評估其定位和授時效能的方法,并給出了測試評估的指標建議作為參考,為地基偽衛星增強北斗衛星導航系統的應用及推廣提供了相應的評價工具。
北斗衛星導航系統;信號網絡;偽衛星;測試評估

目前在山坳、礦井和高樓林立等區域,世界上的GNSS系統(GPS、GLONASS、GALILEO等)都面臨著由于衛星信號受到遮擋而影響定位精度甚至無法完成定位的問題[1]。我國自行研制的北斗衛星導航系統(BDS)也不例外。除此之外,由于BDS目前特有的GEO+IGSO+MEO混合星座構型[2]以及衛星信號精度、鐘差、地面基站相對較少等原因,其服務區內有許多區域的定位精度較差甚至無法定位。目前學術界和工程界主要采用多GNSS系統組合[3-5]來克服這個問題,但該方法無法在未來可能存在的涉及國家安全的領域(如軍事、銀行、電網等)中應用。
引入偽衛星[6]技術,結合BDS的獨特性,以偽衛星為基礎建立北斗地基導航信號網絡,可以對解決上述問題進行有效嘗試。但北斗地基導航信號網絡的應用效能如何,可否在相關區域補充增強或替代BDS,是需要用定量指標來鑒定的。因此,本文研究后擬提出一種偽衛星增強北斗系統的測試評估方法,嘗試為未來開展此類研究及進一步推廣北斗系統的應用提供一個相應的工具。
1 北斗地基導航信號網絡
1.1 系統組成
北斗地基導航信號網絡是以偽衛星技術為核心的北斗地基增強系統,其體系結構包括構成要素和參與要素。構成要素由偽衛星、偽衛星監測站、北斗地基導航增強型定位終端、偽衛星網絡管理中心和時間同步系統組成;參與要素由北斗導航衛星和地面運控系統組成。網絡的體系結構覆蓋頻譜、測量、通信、網絡、安全性、設備6類體系,其直觀描述如圖1所示。
北斗地基導航信號網絡采用閉環設計思想。偽衛星監測站負責對其所覆蓋區域內的所有偽衛星進行監測,將完好性和偽衛星間時差信息通過偽衛星控制數據網(光纖數據通道)傳遞給偽衛星網絡管理中心,在偽衛星網絡管理中心完成時間同步解算,并將完好性和時間同步信息通過偽衛星控制數據網反饋給各偽衛星,從而構成一個閉環系統。其中偽衛星控制數據網的物理實現載體是光纖,構建方式可通過租用電信 數據通信通道專線實現。其系統結構如圖2所示。

圖1 北斗地基導航信號網絡的體系架構
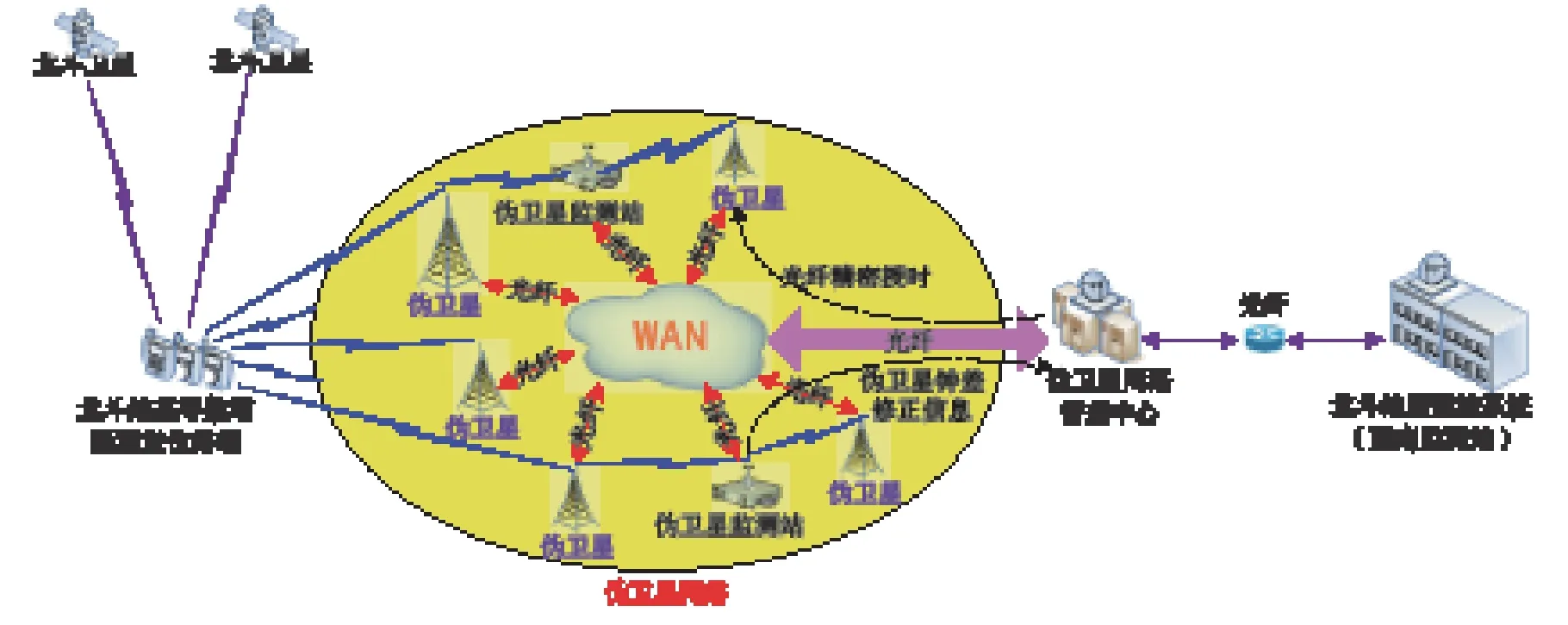
圖2 北斗地基導航信號網絡的系統結構
1.2 關鍵技術
用地基偽衛星建立北斗地基導航信號網絡,相比導航衛星而言,已具備了三大優勢:①地基偽衛星安裝位置固定,其星歷比移動的導航衛星更易處理;②地基偽衛星間距離比導航衛星近,可通過有線方式實現更高精度的星間時間同步;③偽衛星在地球表面,信號傳播過程中不經過電離層,誤差比導航衛星小。但是,要保證其自身優勢的充分發揮,必須解決3項關鍵技術難題,具體內容如表1所示,其中時間同步技術的內容和指標來源于參考文獻[7]。
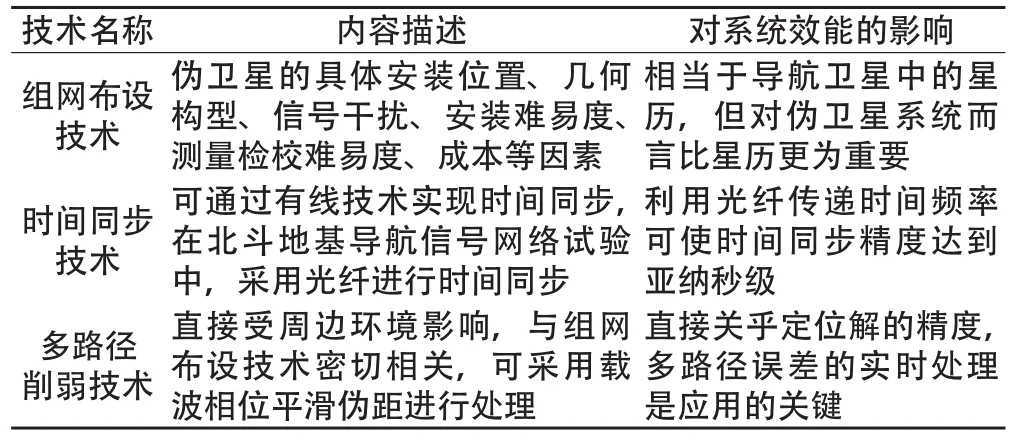
表1 北斗地基導航信號網絡的關鍵技術
2 測試評估方法研究
2.1 靜態測試評估方法
通常對于衛星導航系統的靜態測試評估主要包括定位精度和授時精度測試。因此,本文也選擇靜態定位精度和靜態授時精度來評估北斗地基導航信號網絡對BDS的輔助和增強效果。
2.1.1 靜態定位精度
增強型定位終端可以在北斗衛星/偽衛星協同工作和偽衛星獨立工作兩種模式下工作。將終端天線置于已經過傳統測繪方式精確標定的已知點上構成基準站,進行48 h連續數據采集,采集頻度為1次/30 s。利用接收的各顆偽衛星的偽距觀測數據和偽衛星導航電文信息進行終端定位解算,并與高精度已知點位置進行比較,測試增強型定位終端的靜態定位精度。測試原理如圖3所示。
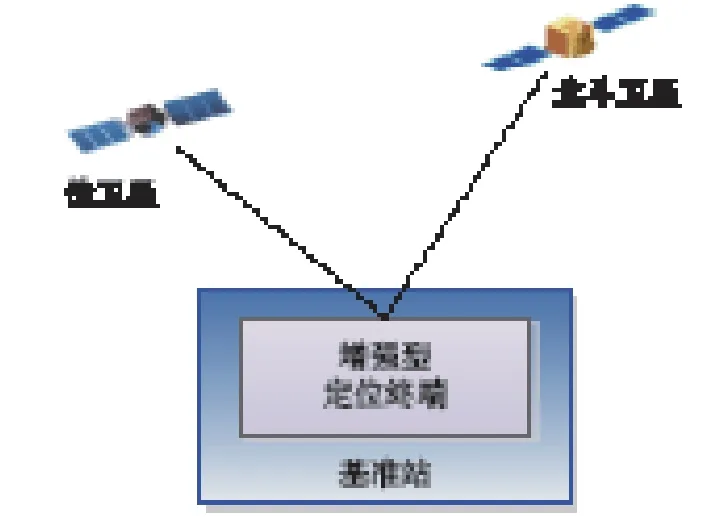
圖3 靜態定位精度測試示意圖
要對采集的測試數據進行記錄分析和處理,評估靜態定位精度的計算公式為:
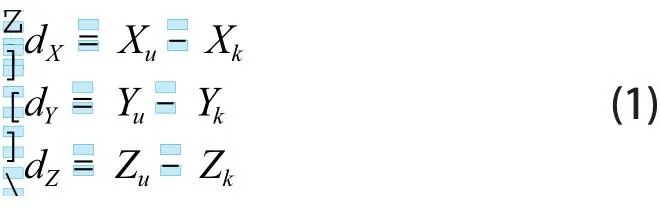
式中,(dX,dY,dZ)為靜態定位精度的實時值;(Xu,Yu,Zu)為接收機定位的空間三維直角坐標;(Xk,Yk,Zk)為基準站的空間三維直角坐標。式中,dE、 dN、dU、dH分別為東方向誤差、北方向誤差、天頂方向誤差以及水平位置誤差。
分別按北斗衛星/偽衛星協同定位模式和偽衛星獨立定位模式對整個觀測時段的定位終端定位精度進行統計,給出定位精度及其可用度的統計結果。定位終端定位精度按99%置信度進行統計,基本方法是將待評估數據中所有歷元的定位誤差從小到大排序,取99%分位點處定位結果的誤差值作為99%置信度精度。定位終端定位精度可用度統計方法是滿足相應精度的歷元記為可用,否則記為不可用。
參考國外針對偽衛星增強GPS系統的相關研究數據[8-9]和BDS內部測試數據,建議偽衛星和北斗衛星協同定位模式下的評估標準為水平精度優于1 m、高程精度優于1 m;根據國外進行的GPS系統類似實驗[10]結果,建議偽衛星獨立定位模式下的評估標準為水平精度優于3 m。
2.1.2 靜態授時精度
在基準站放置1臺增強型定位終端,進行連續1 h數據采集,采集頻度為1次/s。終端接收北斗衛星和偽衛星信號并進行定時解算;將終端的1 pps、運管系統輸出的1 pps兩路信號接入時間間隔計數器,測量二者間時差,計算北斗地基導航增強系統地面用戶授時精度。
對整個觀測時段兩路1 pps信號的時差值進行處理,給出北斗地基導航增強系統授時精度及其可用度的統計結果。授時精度按99%置信度進行統計,基本方法是將待評估數據中所有歷元的時差值從小到大排序,取99%分位點處時差值作為99%置信度精度。授時精度的可用度統計方法是滿足相應精度的歷元記為可用,否則記為不可用。以BDS正常工作狀態下的授時精度為參考,建議北斗地基導航信號網絡的授時精度測試評估標準為優于3 ns。
2.2 動態測試評估方法
動態測試評估主要針對用戶的定位精度進行。用戶的動態定位精度測試依托地面移動載體(主要是汽車等)完成(圖4),實驗方法和具體步驟為:
1)選擇一個已知精確坐標的偽衛星站點安置一 臺差分型GPS接收機作為基準站,在汽車上固定安裝一 臺與基準站配套的差分GPS接收機和一臺支持北斗和偽衛星的增強型定位終端。
2)根據選定的路線,連續進行測試;動態測試的采樣頻度為1次/s,基準站、移動載體分別記錄GPS載波相位、偽距等原始觀測數據,移動載體記錄增強型定位終端按照設定時間間隔得到的定位時刻、終端位置、衛星信號狀況和GDOP等信息。時間歸算和坐標歸算后,將增強型定位終端定位結果與GPS接收機單點定位結果進行實時初步比對測試;利用基準站及移動載體GPS測量數據進行高精度計算(PPP和相對定位解算),并將定位結果與經時間歸算后的增強型定位終端定位結果進行精確比對測試。
3)以每條路線為單位,統計定位精度等,形成測試結果報表。

圖4 動態定位精度測試示意圖
在數據的記錄與處理方面,動態測試定位結果比對的數據為高精度GPS精密定位結果和增強型定位終端定位結果,以證明該方法的相對可用性。
式中,dP為平面位置差,下標分別表示差分GPS定位結果和北斗/偽衛星協同定位結果,單位為m。平面定位精度統計和高程定位精度統計的計算公式分別為:

式中,N為參加統計的觀測次數。允許操作人員輸入的最大限差值為σP,Hmax和σP,Vmax,在統計計算中排除超過最大限差值的數據,累計出現次數,并記錄該數據。所輸入的限差值不得小于系統預估定位精度的5倍。另外,當出現GPS受干擾不能進行正常工作、GPS不能進行正常差分工作或GPS差分結果按PDOP估計精度不滿足所設計的差分GPS精度指標等情況時,不記入定位精度統計。
以通過相關理論[11]計算后的計算值為參考,建議將動態定位性能指標設計為:偽衛星和北斗衛星協同定位模式下,水平精度優于2 m、高程精度優于2 m。
3 結 語
本文所述的測試評估方法可以有效地對北斗地基導航信號網絡輔助增強北斗系統的能力進行評估,通過該方法測試得出的結果可以在對系統測試改造升級過程中起到標尺作用。在未來的研究中,對多路徑誤差的進一步處理和偽衛星的天線相位中心標定會成為提升該方法精度的新增長點。當基于北斗地基導航信號網絡的用戶定位結果及系統可靠性接近BDS的獨立定位水平時,將會為BDS無法正常服務時提供一種可靠的應急的手段。
[1] WANG J P, GAO J X,LIU C,et al. High Precision Slope Deformation Monitoring Model Based on the GPS/Pseudolites Technology in Open-pit Mine[J]. International Journal of Mining Science and Technology,2010,20(1):126-131
[2] 王勝利,王慶,楊徉,等.北斗IGSO/GEO/MEO衛星聯合
高精度定位方法[J].中國慣性技術學報,2013(6):792-796
[3] 臧楠.BDS/GNSS精密單點定位算法研究[D].西安:長安大學,2015
[4] 李墩泰.GPS/BD-2組合定位技術研究[D].哈爾濱:哈爾濱工程大學,2013
[5] 徐君毅, 楊元喜, 李金龍,等.COMPASS與其他GNSS組合導航完好性分析[J].中國科學:地球科學,2013(10):1 632-1 642 [6] 劉超,高井祥,于子晏,等.GPS/偽衛星相對定位中偽衛星優化布設模型研究[J].中國礦業大學學報,2012(1):120-126 [7] CHEN X,ZHANG J ,LU J L, et al. Feed-forward Digital Phase Compensation for Long-distance Precise Frequency Dissemination Via Fiber Network[J]. Optics Letters,2015,40(3):371-374
[8] WANG J,Tsujii T,Rizos C, et al. GPS and Pseudo-satellites Integration for Precise Positioning[J].Geomatics Research Australasia,2001,74:103-117
[9] Choudhury M,Rizos C.Slow Structural Deformation Monitoring Using Locata:a Trial at Tumut Pond Dam[J]. Journal of Applied Geodesy,2010(4):177
[10] JANG J, Ahn W G, Seo S, et al. Flight Test Result for the Ground-based Radio Navigation System Sensor with an Unmanned Air Vehicle[J]. Sensors,2015,15(11):28 472-28 489
[11] 周巍.北斗衛星導航系統精密定位理論方法研究與實現[D].鄭州:信息工程大學,2013
P228.4
B
1672-4623(2017)05-0016-03
10.3969/j.issn.1672-4623.2017.0050.5
符京楊,博士研究生,研究方向為衛星導航地基增強技術。
2016-11-03。
項目來源:國家高技術研究發展計劃資助項目(2013AA122403);國家自然科學基金資助項目(41274014、41501491)。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
