基于變速積分PID的KRG速比控制策略研究
2017-07-06 11:03:06徐炎炎韋龍平
關(guān)鍵詞:控制策略
于 英,徐炎炎,韋龍平
(1.江蘇大學(xué) 汽車與交通工程學(xué)院, 江蘇 鎮(zhèn)江 212000; 2.吉孚動(dòng)力, 江蘇 蘇州 215000)
?
基于變速積分PID的KRG速比控制策略研究
于 英1,徐炎炎1,韋龍平2
(1.江蘇大學(xué) 汽車與交通工程學(xué)院, 江蘇 鎮(zhèn)江 212000; 2.吉孚動(dòng)力, 江蘇 蘇州 215000)
以新型錐環(huán)無級變速器為研究對象,針對在車輛速比變化較大工況下目標(biāo)速比階躍輸入對實(shí)際速比影響較大的情況,采用變速積分PID控制器對錐環(huán)無級變速器的速比進(jìn)行控制。通過Matlab/Simulink建立整車仿真模型和變速積分控制器模型,對急加速和全減速兩種典型工況進(jìn)行仿真分析,驗(yàn)證整車仿真模型和變速積分速比控制策略的正確性。基于dSPACE系統(tǒng)對搭載錐環(huán)無級變速器的樣車進(jìn)行實(shí)車試驗(yàn),將試驗(yàn)結(jié)果與仿真結(jié)果對比,驗(yàn)證速比控制策略的可行性。
錐環(huán)無級變速器;錐環(huán)無級變速器;變速積分;PID;速比控制
目前,對駕乘舒適性與低油耗要求的不斷提高推動(dòng)了金屬帶式無級變速器在很多車型上的應(yīng)用,但是其成本比傳統(tǒng)變速器高出許多,因此低成本高效能的無級變速器成為國內(nèi)外研究熱點(diǎn)[1-3]。德國吉孚動(dòng)力開發(fā)的錐環(huán)無級變速器(KRG)通過2個(gè)圓錐與錐環(huán)的摩擦傳遞動(dòng)力,其主要元件如滾錐和傳動(dòng)環(huán)、脹緊機(jī)構(gòu)和速比調(diào)節(jié)執(zhí)行機(jī)構(gòu)都是純機(jī)械控制[4],能在高效及低功耗的條件下進(jìn)行快速、連續(xù)的速比調(diào)節(jié),大大提高了車輛舒適性和燃油經(jīng)濟(jì)性。本文將對錐環(huán)無級變速器的關(guān)鍵技術(shù)——速比控制策略進(jìn)行研究。
1 KRG的變速原理
1.1 KRG結(jié)構(gòu)組成
錐環(huán)無級變速器的變速系統(tǒng)由輸入圓錐、輸出圓錐、錐環(huán)和調(diào)整結(jié)構(gòu)組成,錐環(huán)繞在輸入圓錐上,如圖1所示。發(fā)動(dòng)機(jī)輸出的動(dòng)力通過2個(gè)圓錐與錐環(huán)間的摩擦傳遞[5]。
1.2 KRG速比調(diào)節(jié)原理
KRG由錐環(huán)與圓錐的摩擦來傳遞動(dòng)力,通過改變錐環(huán)位置來實(shí)現(xiàn)速比調(diào)節(jié)。當(dāng)錐環(huán)徑向平面與圓錐軸線垂直時(shí),錐環(huán)位置保持不變,速比就不變;當(dāng)錐環(huán)徑向平面與圓錐軸線成一定角度時(shí),錐環(huán)隨著圓錐的滾動(dòng)在錐體表面左右移動(dòng),可連續(xù)地調(diào)節(jié)速比[6]。
圖2為兩個(gè)圓錐與錐環(huán)的幾何關(guān)系,此時(shí)KRG的傳動(dòng)比可表示為:

(1)
式中:wcone-in為輸入錐角速度;wcone-out為輸出錐角速度;Rring-in為環(huán)的內(nèi)半徑;Rring-out為環(huán)的外半徑;Rcone-in為接觸點(diǎn)處輸入錐半徑;Rcone-out為接觸點(diǎn)處輸出錐半徑。

圖2 錐與環(huán)的幾何關(guān)系
當(dāng)錐環(huán)位于輸入錐最小半徑時(shí),KRG處于最大速比狀態(tài),設(shè)錐環(huán)沿錐面方向上的位移為x,此時(shí)錐環(huán)的位移為0,則輸入錐與輸出錐的工作半徑Rcone-in和Rcone-out分別為:
Rcone-in=Rcone-in0+x·sin(α)
(2)
Rcone-out=Rcone-out0-x·sin(α)
(3)
式中:Rcone-in0為初始位置處輸入錐半徑;Rcone-out0為初始位置處輸出錐半徑;α為圓錐錐角。
由式(1)~(3)可得錐環(huán)位移x與KRG速比i的關(guān)系:
(4)
圖3為錐環(huán)位置和速比以及錐工作半徑的關(guān)系曲線。可以看出:每個(gè)錐環(huán)位置都對應(yīng)1個(gè)速比值,且和輸入、輸出錐的工作半徑也一一對應(yīng)。因此,通過調(diào)節(jié)錐環(huán)位置可以連續(xù)地改變速比。由于圓錐獨(dú)特的形狀特性,改變錐環(huán)位置只需要通過改變錐環(huán)轉(zhuǎn)角就能實(shí)現(xiàn)。錐環(huán)轉(zhuǎn)角則由電機(jī)通過錐環(huán)調(diào)整架控制,如圖4所示。電機(jī)轉(zhuǎn)角與錐環(huán)轉(zhuǎn)角的關(guān)系為:

(5)
式中:Leccentric為偏心軸半徑;Llever為推桿力臂長度;θmotor為電機(jī)轉(zhuǎn)動(dòng)的角度;ip為電機(jī)減速機(jī)構(gòu)的速比。

圖3 速比與錐環(huán)位置及錐工作半徑關(guān)系

圖4 KRG速比調(diào)節(jié)機(jī)構(gòu)

φring=k·θmotor
(6)
2 變速積分PID速比控制策略
2.1 KRG速比控制方案
KRG速比控制可以解析為3個(gè)部分:工況識別、控制策略選擇和系統(tǒng)執(zhí)行。系統(tǒng)根據(jù)節(jié)氣門開度和車速計(jì)算出當(dāng)前工況下發(fā)動(dòng)機(jī)目標(biāo)轉(zhuǎn)速和變速器目標(biāo)速比,由錐環(huán)位置傳感器信號可知當(dāng)前速比,在此基礎(chǔ)上選擇對應(yīng)的速比控制策略,由PID控制器計(jì)算出速比執(zhí)行電機(jī)的PWM,驅(qū)動(dòng)速比調(diào)節(jié)機(jī)構(gòu)使錐環(huán)轉(zhuǎn)動(dòng)一定的角度[7]。由于輸入錐存在一定的轉(zhuǎn)速和其具有的特有形狀,錐環(huán)可以在錐面上左右移動(dòng)改變位置,實(shí)現(xiàn)速比的連續(xù)調(diào)節(jié)。
2.2 變速積分PID速比控制策略
傳統(tǒng)的速比控制策略在處理車輛速比變化較大工況下的速比調(diào)節(jié)問題時(shí)難以根據(jù)系統(tǒng)偏差大小合理調(diào)整積分速度,整個(gè)系統(tǒng)的控制品質(zhì)不太理想。這是由于普通PID算法中積分增益KI保持不變,不能在系統(tǒng)偏差大時(shí)減弱積分項(xiàng),偏差小時(shí)加強(qiáng)積分項(xiàng)[8],而變速積分PID可以較好地解決這一問題。

(7)

(8)
變速積分PID控制器可表示為:
(9)
式中:fP為比例增益KP的系數(shù);fI為積分增益KI的系數(shù);fD為微分增益KD的系數(shù)。
3 速比控制仿真模型
3.1 整車仿真模型
通過對錐環(huán)無級變速器的速比調(diào)節(jié)和控制原理的分析,基于Matlab/Simulink模塊搭建整車仿真模型,如圖5所示[10-11]。該整車模型主要分為3個(gè)組成部分:駕駛員控制、速比控制回路和車輛行駛系統(tǒng)。其中速比控制回路包括目標(biāo)速比計(jì)算模塊(Target Ratio)、速比控制模塊(Ratio Controller)、速比執(zhí)行機(jī)構(gòu)模塊(Ratio Actuator)、變速器模塊 (KRG)。車輛行駛系統(tǒng)包括發(fā)動(dòng)機(jī)模塊(Engine Model)、車輛傳動(dòng)系模塊(Vehicle Model),路面條件模塊(Road Condition)及行駛阻力模塊(Resistance)。
3.2 變速積分PID控制器模型
整車仿真模型中的速比控制模塊采用變速積分PID速比控制器,仿真模型如圖6所示。

圖5 整車仿真模型

圖6 變速積分PID速比控制器
3.3 整車仿真參數(shù)
整車參數(shù)如表1所示。

表1 整車主要參數(shù)
4 仿真與試驗(yàn)結(jié)果對比分析
4.1 整車仿真結(jié)果分析
為了驗(yàn)證搭載KRG的整車仿真模型的正確性和變速積分PID控制器在速比變化較大工況下的控制品質(zhì),仿真模擬了汽車加速和減速工況。
4.1.1 加速工況仿真結(jié)果
仿真模擬車輛在水平路面行駛時(shí)的加速工況。假設(shè)初始節(jié)氣門開度為45%、車輛行駛至11 s 時(shí),節(jié)氣門開度在2 s內(nèi)增大至80%,仿真結(jié)果如圖7~12所示。
由仿真結(jié)果可知:在車輛加速前,發(fā)動(dòng)機(jī)以2 750 r/min轉(zhuǎn)速工作,此時(shí)車速為130 km/h;在11 s時(shí),節(jié)氣門開度突然增大,此時(shí)發(fā)動(dòng)機(jī)轉(zhuǎn)速隨之也快速增大,為了提高車輛的加速性能,錐環(huán)轉(zhuǎn)角變?yōu)?0.25°,同時(shí)錐環(huán)位移變小,KRG速比增大;在12 s時(shí),車速開始迅速增大,此時(shí)錐環(huán)往相反方向迅速回正,且錐環(huán)位移變大,速比逐漸減小;在14 s時(shí),發(fā)動(dòng)機(jī)到達(dá)了80%節(jié)氣門開度下的目標(biāo)轉(zhuǎn)速4 000 r/min,此時(shí)車速與速比保持恒定,不再變化。在整個(gè)加速過程中,錐環(huán)目標(biāo)位置與實(shí)際位置跟隨性良好,目標(biāo)速比與實(shí)際速比相吻合,車速上升平穩(wěn),車輛駕駛舒適性好。

圖7 節(jié)氣門開度與坡度

圖8 發(fā)動(dòng)機(jī)轉(zhuǎn)速

圖9 車速

圖10 目標(biāo)速比與實(shí)際速比

圖11 錐環(huán)轉(zhuǎn)角

圖12 錐環(huán)目標(biāo)位置與實(shí)際位置
4.1.2 減速工況仿真結(jié)果
仿真模擬車輛在水平路面行駛時(shí)的減速工況。假設(shè)初始節(jié)氣門開度為80%、車輛行駛至16 s時(shí),節(jié)氣門開度在2 s內(nèi)減小至0,仿真結(jié)果如圖13~18所示。
由仿真結(jié)果可知:在車輛減速前,發(fā)動(dòng)機(jī)以4 000 r/min轉(zhuǎn)速工作,此時(shí)車速為155 km/h;在16 s時(shí),節(jié)氣門開度迅速減小,為了降低車速,錐環(huán)轉(zhuǎn)動(dòng)了0.2°,錐環(huán)位移持續(xù)增大,KRG速比從0.7降低至0.48,發(fā)動(dòng)機(jī)轉(zhuǎn)速也隨之降低;在17 s時(shí),錐環(huán)轉(zhuǎn)角回正,錐環(huán)位移不再變化,速比保持恒定;在22 s時(shí),發(fā)動(dòng)機(jī)轉(zhuǎn)速下降至目標(biāo)轉(zhuǎn)速800 r/min,錐環(huán)轉(zhuǎn)過了一個(gè)負(fù)角度,錐環(huán)位移開始迅速減小,變速器速比持續(xù)增大,錐環(huán)在24 s時(shí)回正,錐環(huán)位移達(dá)到初始位置且不再變化,變速器達(dá)到最大速比2.8,此時(shí)車速不斷減小直至停止。整個(gè)減速工況中,錐環(huán)目標(biāo)位置與實(shí)際位置跟隨性良好,目標(biāo)速比與實(shí)際速比相吻合,車速下降平穩(wěn),車輛駕駛舒適性好。

圖13 節(jié)氣門開度與坡度

圖14 發(fā)動(dòng)機(jī)轉(zhuǎn)速

圖15 車速

圖18 錐環(huán)目標(biāo)位置與實(shí)際位置
仿真結(jié)果表明:兩種工況下的目標(biāo)速比與實(shí)際速比,錐環(huán)目標(biāo)位置與實(shí)際位置都相吻合,速比控制過程與實(shí)際一致,驗(yàn)證了整車模型及速比控制策略的合理性。
4.2 樣車試驗(yàn)結(jié)果分析
將德國吉孚自主研發(fā)的錐環(huán)式無級變速器搭載至某試驗(yàn)車輛,以MicroAutoBox取代原有變速器控制單元(TCU)[12],利用dSPACE系統(tǒng)進(jìn)行加速、減速工況實(shí)車試驗(yàn)[13],進(jìn)一步驗(yàn)證變速積分PID速比控制策略的控制品質(zhì)。試驗(yàn)路況為平坦、干燥的瀝青路面。圖19~20為整車急加速和全減速工況試驗(yàn)結(jié)果。
實(shí)車試驗(yàn)結(jié)果表明:在急加速工況下,在26.2 s時(shí)駕駛員猛踩油門踏板使車輛加速,此時(shí)KRG實(shí)際速比與目標(biāo)速比跟蹤良好,車速變化平穩(wěn);在全減速工況下,約在5 s時(shí)駕駛員完全松開油門踏板,車輛減速,此時(shí)KRG速比先減小,后隨著車速的下降而增大,直至變速器達(dá)到最大速比。
實(shí)車試驗(yàn)結(jié)果與仿真結(jié)果一致,再次說明變速積分PID控制器在速比變化較大的工況下可以保持高品質(zhì)的速比控制。

圖19 急加速工況
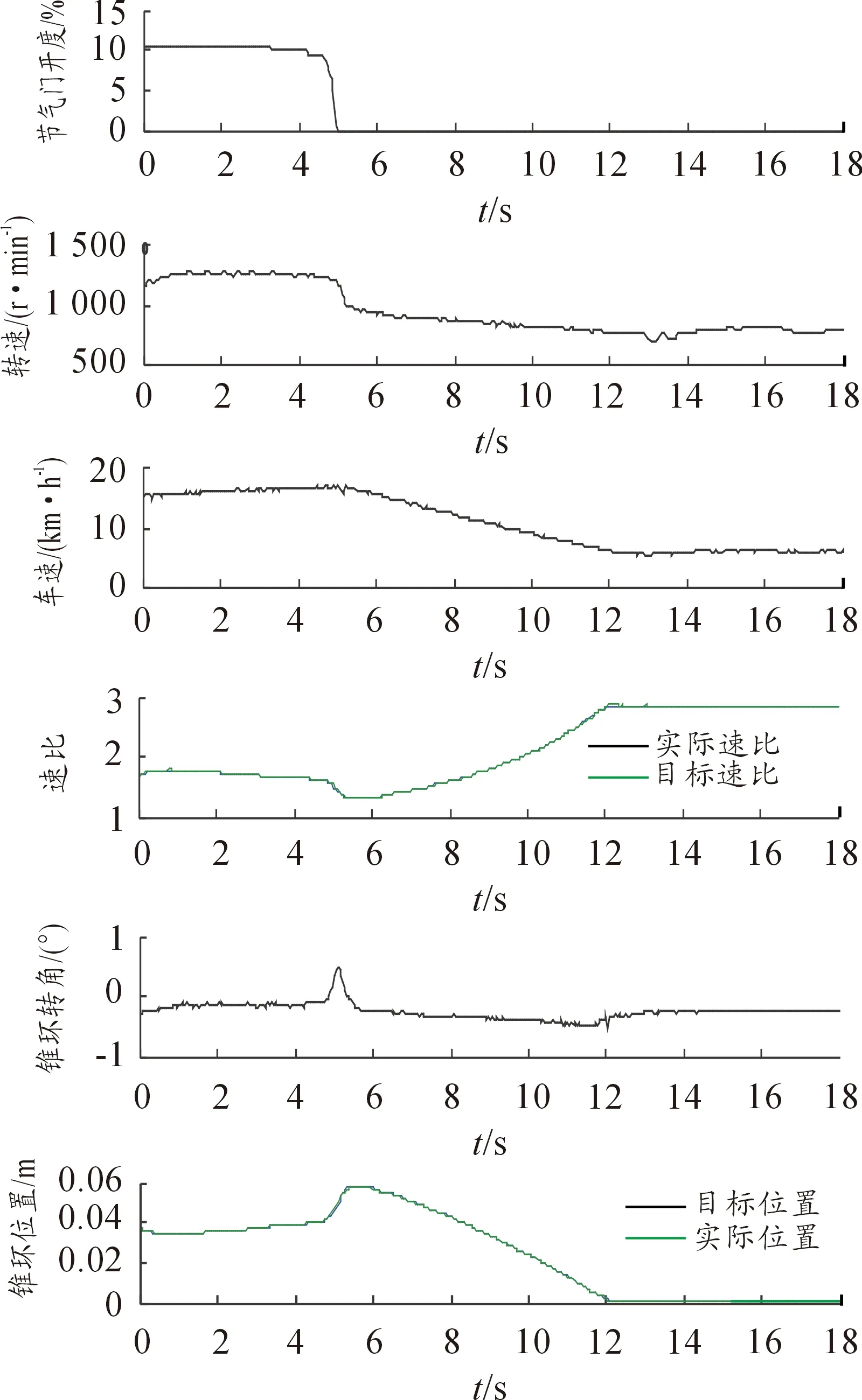
圖20 全減速工況
5 結(jié)束語
基于Matlab/Simulink建立了搭載KRG的整車仿真模型和變速積分PID速比控制器模型,仿真模擬車輛加速和減速兩種工況下KRG速比控制過程,結(jié)果表明:實(shí)際速比能較好地跟隨目標(biāo)速比變化,速比控制品質(zhì)較好。對搭載KRG的樣車進(jìn)行了急加速、全減速兩種典型工況的實(shí)車試驗(yàn),結(jié)果表明在:變速積分PID控制策略下,速比變化較大時(shí)KRG各參數(shù)依然變化平穩(wěn),速比跟隨性較好,再次驗(yàn)證了變速積分PID速比控制策略的有效性。
[1] 程乃士,張華偉,楊會林,等.汽車金屬帶式無級變速器-CVT原理和設(shè)計(jì)[M].北京:機(jī)械工業(yè)出版社,2007:1-6.
[2] 潘國揚(yáng),石曉輝,郝建軍,等.新型無級變速器( CVT) 技術(shù)解析[J].重慶理工大學(xué)學(xué)報(bào)(自然科學(xué)),2015(2):30-35.
[3] 潘國揚(yáng),林健.推力鋼帶式和鏈?zhǔn)綗o級變速器NVH性能研究[J].重慶理工大學(xué)學(xué)報(bào)(自然科學(xué)),2016(3):28-33.
[4] 劉金波,李定山,李發(fā)軍,等.KRG錐環(huán)無級變速器技術(shù)概述[J].中國科技信息,2012(18):104.
[5] CASPER J.Model based ratio control in a cone ring transmission,[D].Aachen:Technische University,2006.6.
[6] 陳志剛.基于錐輪位移的無級變速器傳動(dòng)比控制方法研究[D].長春:吉林大學(xué),2012.
[7] 劉金琨.先進(jìn)PID控制及其MATLAB仿真 [M].2版.北京:電子工業(yè)出版社,2006.
[8] 高中偉.金屬帶式無級變速器控制策略的研究[D].長春:吉林大學(xué),2008.
[9] 周萍,聶晉,孫躍東.基于模糊PID控制的CVT速比仿真分析[J].機(jī)械傳動(dòng),2011,35(8):25-28.
[10]赫允志.無級變速器控制系統(tǒng)與硬件在環(huán)仿真研究[D].重慶:重慶大學(xué),2011.
[11]陳新文.機(jī)械電子式無級變速器仿真及其電控系統(tǒng)硬件設(shè)計(jì)研究[D].沈陽:沈陽工業(yè)大學(xué),2012.
[12]宋翔.金屬帶式無級變速器與發(fā)動(dòng)機(jī)的匹配研究與仿真[D].成都:西南交通大學(xué),2012.
[13]張晉東.基于dSPACE的混合動(dòng)力汽車AMT電機(jī)控制系統(tǒng)[D].長春:吉林大學(xué),2006.
(責(zé)任編輯 劉 舸)
Research on Ratio Control Strategy of KRG Based on PID with Variable Integral
YU Ying1, XU Yan-yan1, WEI Long-ping2
(1.College of Automobile and Traffic Engineering, Jiangsu University, Zhenjiang 212000, China; 2.GIF, Suzhou 215000, China)
KRG is studied as a new type of CVT. PID with variable integral is designed to control the speed ratio of KRG, under the influence of target speed ratio step input to actual speed with the driving condition of large speed ratio change. The vehicle simulation model and the cascade PID controller is build with Matlab/Simulink to simulate the acceleration and deacceleration typical working conditions to verify the correction of the simulation model and the PID with variable integral control strategy. The novel vehicle is test based on dSPACE and the result is compared with simulation result to verify the possibility of control strategy of speed ratio.
core ring continuously variable transmission; KRG; variable integral; PID; speed ratio control
2016-05-08
于英(1957—),女,黑龍江呼蘭人,副教授,主要從事車輛傳動(dòng)及控制技術(shù)方面的研究; 徐炎炎(1991—),女,江蘇南通人,碩士研究生,主從事汽車傳動(dòng)系統(tǒng)研究,E-mail:YANYAN_XU91@163.com。
于英,徐炎炎,韋龍平.基于變速積分PID的KRG速比控制策略研究[J].重慶理工大學(xué)學(xué)報(bào)(自然科學(xué)),2017(6):15-22.
format:YU Ying,XU Yan-yan,WEI Long-ping.Research on Ratio Control Strategy of KRG Based on PID with Variable Integral[J].Journal of Chongqing University of Technology(Natural Science),2017(6):15-22.
10.3969/j.issn.1674-8425(z).2017.06.003
U463.212
A
1674-8425(2017)06-0015-08
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
