基于波門預估遞推剔除大跳動星點快速求解姿態(tài)算法研究
2017-07-07 13:20:29劉騰駿林榮峰朱晏慶肖東東
上海航天 2017年3期
關鍵詞:方法
劉騰駿,林榮峰,朱晏慶,周 宇,肖東東
(上海航天控制技術研究所,上海 201109)
?
基于波門預估遞推剔除大跳動星點快速求解姿態(tài)算法研究
劉騰駿,林榮峰,朱晏慶,周 宇,肖東東
(上海航天控制技術研究所,上海 201109)
考慮星敏感器對快速性、穩(wěn)定性和高精度的需求,針對傳統(tǒng)星敏感器軟件在采集波門出現大跳動采集星點時而出現星跟蹤失敗和姿態(tài)四元數信息無法輸出的缺點,對一種基于波門預估遞推剔除大跳動星點快速求解姿態(tài)的方法進行了研究。根據四元數及姿態(tài)矩陣,采用基于距離的有效數據提取方法以剔除無效和跳變的星點數據;針對不同天區(qū)的不同星點運動幅度各異的特征,采用預估遞推波門大小可根據不同星點確定各自的波門半徑,以減少因波門半徑產生的無法跟蹤和波門多星識別失敗現象。改進了波門參數設定,并對波門跟蹤進行優(yōu)化:根據算得的旋轉角度與真實轉過角度的差異剔除無效星點并進行更新,由更新后的旋轉角和姿態(tài)四元數估計新的四元數。數學仿真結果表明:該法可有效減小星點大跳動對姿態(tài)求解的影響,提高星敏感器輸出四元數姿態(tài)的精度。
星敏感器; 波門跟蹤; 多矢量定姿; 估計遞推算法; 星點跳動; 星點剔除; 四元數; 波門參數
0 引言
星敏感器的工作原理是通過拍攝星圖、圖像預處理、星點質心提取、計算觀測星在星敏感器測量坐標系中的分量,實現星圖特征提取、全天識別、星跟蹤、姿態(tài)解算等,得到星敏感器相對慣性系的姿態(tài)四元數。國內星敏感器應用軟件開發(fā)普遍基于DSP或AT697處理平臺,主要完成與FPGA數據交互、星敏感器工作模式管理、功能模塊實現,從而以恒星測量為基礎,進行姿態(tài)確定[1]。工程實踐中,星跟蹤匹配成功后,在進行姿態(tài)解算時一般會采用計算量較大的多矢量確定姿態(tài)的算法求解姿態(tài)[2-3]。因矢量確定姿態(tài)求解過程存在需對中間矩陣進行代數平均求解的缺陷,故在星點跳動、毛刺、干擾時會出現姿態(tài)輸出跳變,進而輸入至控制系統(tǒng),造成衛(wèi)星姿態(tài)的抖動并降低相關載荷的工作效率和質量[4-6]。針對上述問題,國內有研究單從星敏感器姿態(tài)確定算法,分別采用q-方法、QUEST算法、ESOQ2算法、SVD算法和FOAM算法進行姿態(tài)確定求解,但由于計算均較復雜,不便于工程實現,在應對星點跳動、毛刺時會出現姿態(tài)跳動,效果并不理想[4,7-8]。后續(xù)有文獻基于星敏感器采用多矢量確定姿態(tài)算法結合卡爾曼濾波算法以改進在外干擾下的姿態(tài)估計,但解決大跳動星點的效果也不理想[9-11]。為此,本文結合星敏感器星跟蹤時的多矢量定姿算法的特性和工程實際采集存在誤差跳動的特點,針對性地設計波門預估遞推提前剔除大跳動星點環(huán)節(jié),提出了一種星敏感器基于波門預估遞推剔除大跳動星點快速求解姿態(tài)的算法。
1 理論分析
1.1 四元數及姿態(tài)矩陣
姿態(tài)四元數表示法不包括三角函數,無奇點,約束條件簡單,應用廣泛,尤其適于描述大角度姿態(tài)機動問題[6]。
設坐標系O-xoyozo圍繞ON軸轉過角δ與坐標系O-xbybzb重合,ON軸與Oxo,Oyo,Ozo軸(即Oxb,Oyb,Ozb軸)間的角分別為β1,β2,β3。則O-xbybzb系相對O-xoyozo系的姿態(tài)可由δ,β1,β2,β3完全確定,即用四元數完全確定,有
q=q0+q1i+q2j+q3k
式中:i,j,k為四元數單位矢量;q0,q1,q2,q3為四元數。q的向量形式為
式中:
(1)
此處:i=1,2,3。顯然滿足約束條件
(2)
其中:代表旋轉的四元數中只有3個是獨立的。
用三角公式

根據歐拉旋轉及四元數定義,可將歐拉軸/角姿態(tài)矩陣化為四元數姿態(tài)矩陣
(3)
式中:
A12=2(q1q2+q0q3)
A13=2(q1q3-q0q2)
A21=2(q1q2-q0q3)
A23=2(q2q3+q0q1)
A31=2(q1q3+q0q2)
A32=2(q2q3-q0q1)
1.2 有效數據提取模式識別原理
有效數據提取的模式識別,實際上是剔除無效的離群點,有基于統(tǒng)計、距離、密度、深度、偏離等多種經典方法。本文采用算法上易于工程實現和適合嵌入式軟件同時具備辨識能力的基于距離的有效數據提取的模式識別方法。
因星敏感器的有效數據是針對采集星點信息有效性進行提取,設由采集星點A∈(x1,…,xn)組成,其距離關系矩陣D∈(d11,…,dnn)已知。此處:xi為一個三維坐標系中的星點;dij為星點i與星點j的歐氏距離,且
(4)
由于是比較相鄰拍間的星點的信息,姿態(tài)變化很小,因此采用比較各星點變動距離之和。
1.3 星敏感器定姿原理
首先,星敏感器成像是將遠處的星點進行成像投影到星敏感器CCD平面,如圖1所示。采用小孔模型,V=[V1…VN],U=[U1…UN]分別為慣性系中星點矢量集合和相對星敏感器體坐標系中的觀測單位矢量集合[6]。此處:Vi為第i個星點在慣性系中的星點坐標矢量;Ui為第i個星點在星敏感器體坐標系中的觀測單位矢量。圖1中:點O對應星敏感器系統(tǒng)的成像中心,假設星敏感器Z軸與系統(tǒng)光軸重合,用多矢量確定姿態(tài)方法[1]。令此時姿態(tài)矩陣為A(即此時星敏感器體坐標系相對慣性系的姿態(tài)矩陣),則多矢量的觀測方程為
U=AV
(5)
或
V=BU
(6)
此觀測方程的代數解為
(7)
此時求出的B為非正交矩陣。優(yōu)化后可得正交的最優(yōu)矩陣
(8)
式中:I為單位矩陣。由此,可解出姿態(tài)矩陣A。
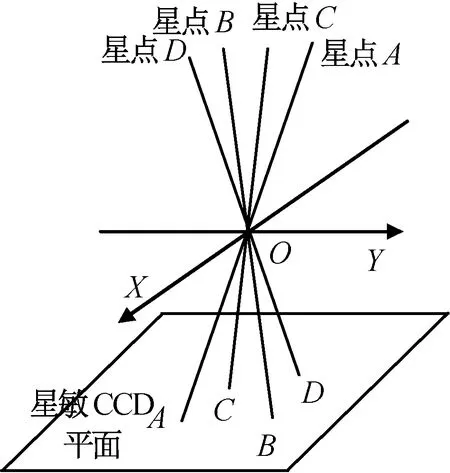
圖1 星敏感器成像Fig.1 Star sensor imaging
1.4 波門跟蹤原理
1.4.1 傳統(tǒng)波門跟蹤方式
波門是星敏感器中用于跟蹤的一個小跟蹤視窗,以快速定位所跟蹤的星,從而快速計算出當前的姿態(tài)。傳統(tǒng)的波門大小設定時直接基于某個參數,不同跟蹤星點的跟蹤波門相同。此設計的缺陷是不同星點在不同天區(qū)時的運動幅度不一致,可能會出現不能跟蹤或單波門多星問題。
1.4.2 優(yōu)化波門跟蹤方式
針對不同天區(qū)的不同星點運動幅度不同的特征,本文提出一種預估遞推波門大小的方法。該法可針對不同的星點確定各自的波門半徑,可減少因波門半徑而產生的無法跟蹤和波門多星識別失敗的現象,在此基礎上,還對當前采集的星點進行無效數據和跳變數據剔除處理。與傳統(tǒng)波門跟蹤方式相比,本文方法的抗干擾和輸出魯棒性更強,提高了星敏感器的安全可靠性。流程如圖2所示。
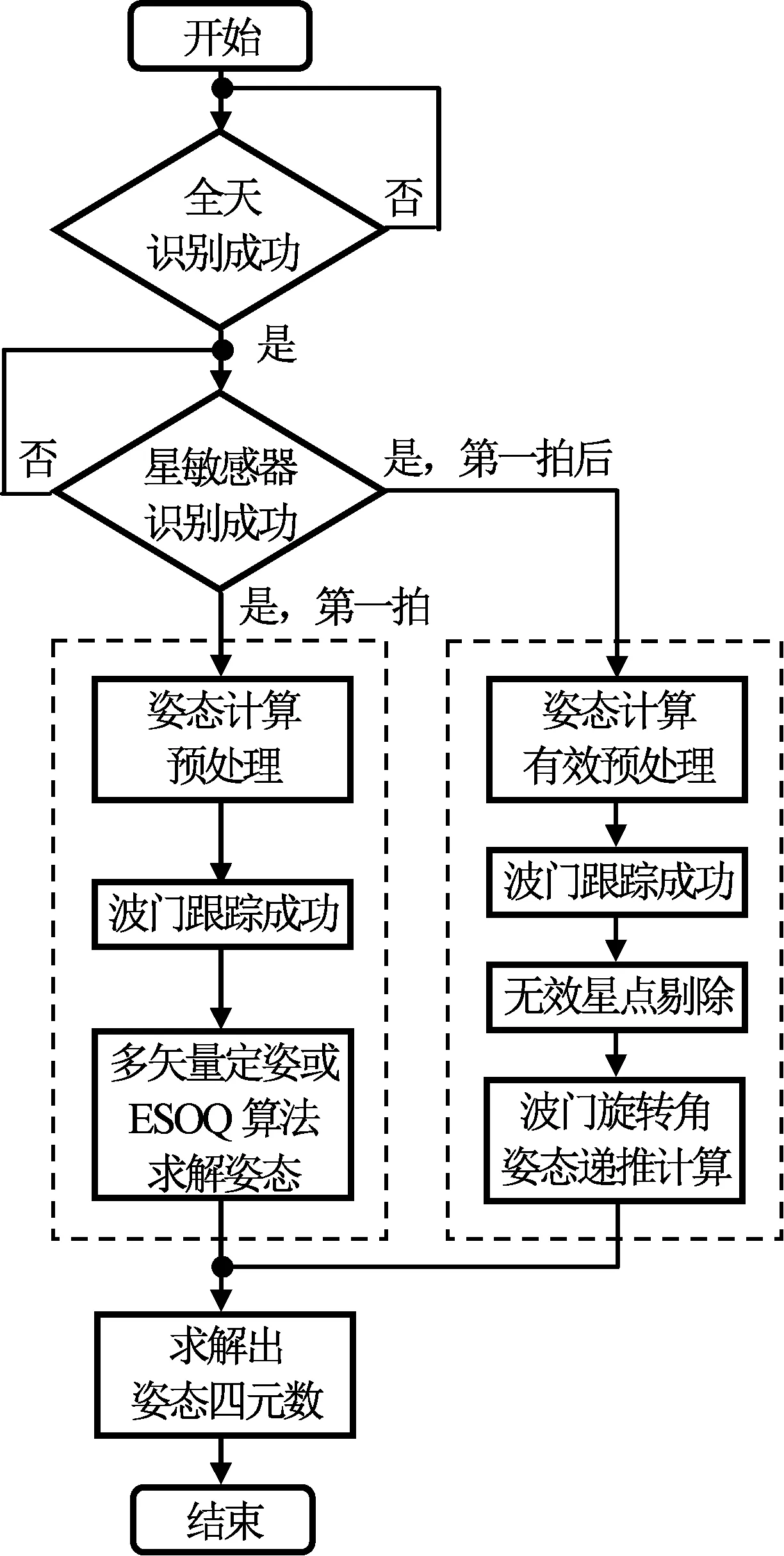
圖2 星敏感器優(yōu)化后流程Fig.2 Star sensor’s process after optimized
2 星點跟蹤波門建模
2.1 經典波門參數設定
經典波門參數根據星敏感器CCD成像原理,從像面像素層面設定波門大小,所確定的波門大小隨不同的相機成像參數而定,同時跟蹤效果也因不同的相機成像參數而各異,易誤出現跟蹤波門失敗。不同星點在繞某軸運動時的運動如圖3所示。圖3中:oE軸為旋轉軸;轉過角度為θ;星點A、B、C為轉前的位置,星點A′、B′、C′為轉后的位置,各點體坐標系中坐標分別為(xA,yA,zA),(xB,yB,zB),(xC,yC,zC),(xA′,yA′,zA′),(xB′,yB′,zB′),(xC′,yC′,zC′)。由圖3可知:其各自的運動的幅度隨與旋轉軸的夾角而不同,某實例如圖4所示。

圖3 星敏感器體坐標系中星點運動Fig.3 Star point‘s movement in star sensor’s body reference
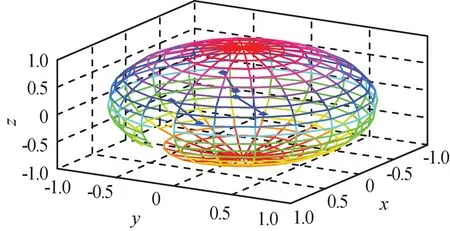
圖4 星敏感器在本體坐標系中星點運動軌跡Fig.4 Star point’s movement trace
2.2 改進波門參數設定
改進的波門可根據各自星點的位置確定更精確的波門大小。首先,確定在固定旋轉角時的星點位置變化。建模星點繞z軸旋轉θ,如圖5所示。

圖5 星點位置變化Fig.5 Star point’s position
繞oz軸轉動時,星點在ox、oy軸上投影值變化較大,可得此時星點A′的x,y的范圍分別為
式中:φx=arctan 2(yA/xA)。同理可推導出z的范圍為[cos(ψ+θ),cos(ψ-θ)]。此處:ψ-θ>0。因此,在進入波門跟蹤階段設定波門,只需根據每拍間隔時間姿態(tài)變化最大角度θmax(在星敏感器能跟蹤的情況下),選取θmax便可設定此時的波門參數為
(9)
式中:ψ>θmax。
為進一步精確跟蹤波門半徑,須確定此時的旋轉軸矢量方向。實際工程應用中,在進入波門跟蹤時上一拍的姿態(tài)四元數信息為已知,因每拍間的運動相當小,故可用上一拍的姿態(tài)四元數中旋轉軸信息作為當前的旋轉軸。由圖5可得
(10)
oA′=
[cos(φx+θ)sinψsin(φx+θ)sinψcosψ]
(11)
則
cos(∠AoA′)=oA·oA′=
cos(φx+θ)cosφxsin2ψ+sin(φx+θ)×
sinφxsin2ψ+cos2ψ=
cosθsin2ψ+cos2ψ
(12)
同理可推得繞任意軸旋轉(如圖6所示,圖6中點C、D為A、A′在其旋轉軸垂面下的投影點)時,夾角間滿足關系
cos∠AoA′=cos∠CoDsin2∠AoE+
(13)
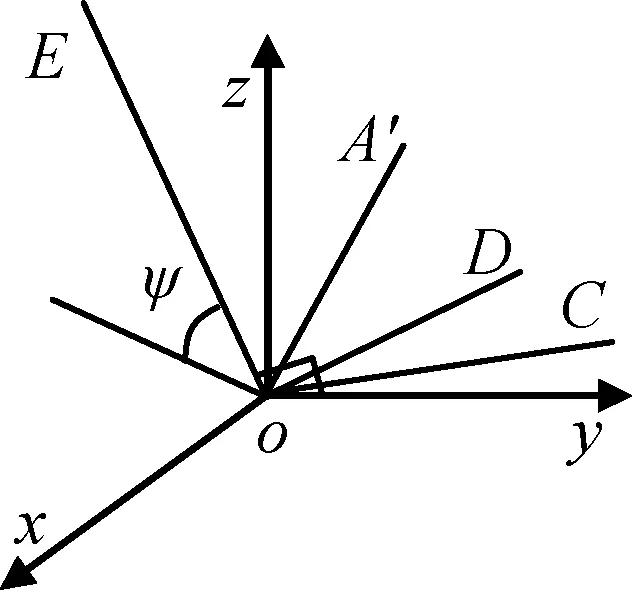
圖6 星點繞任意軸旋轉Fig.6 Star point’s position after rotating e vector
此時,基于波門可記錄相鄰拍時間的星點信息,由此可求出每個星點運動的夾角。對圖3所示,運動夾角
(14)
若運動夾角在旋轉軸矢量垂直平面上的夾角為真實繞四元數旋轉角δ,設oA、oB、oC軸與旋轉軸oE的夾角分別為ψA,ψB,ψC,則滿足關系
(15)
因計算時,θA,θB,θC,ψA,ψB,ψC均已知,則可得各自的相對旋轉轉過的角度
(16)
將解得的δA,δB,δC代入式(9),可得A,B,C相應波門的范圍。
2.3 優(yōu)化波門跟蹤設計
用上述方法解得的δA,δB,δC理論上與真實轉過角度δ一致。星敏感器鏡頭的缺陷、電路及其他噪聲的影響有可能產生跳變誤差較大的星點,會使δA,δB,δC與真實δ不一致,但相鄰一拍間隔較短,正常情況下計算值應與真實值差異保持在一定的范圍內,基于此特征,可進行星點剔除辨識。
計算中,此時的旋轉軸oE采用上一拍推導出的姿態(tài)四元數計算出來的旋轉軸,設上一拍的姿態(tài)四元數
(17)
旋轉軸為
(18)
針對當前進入波門跟蹤狀態(tài),令此時的當前跟蹤星有n個,則基于優(yōu)化原則剔除數據無效的點,其代價函數

(19)
因跟蹤波門星點出現無效跳動數據的概率較小,考慮僅存在單一跳變數據,當Jj取最大值時,剔除此時為j的星點信息。再對剔除該星點后的旋轉角度進行更新,更新后的最佳估計旋轉角
(20)
(21)
式中:
(22)
3 優(yōu)化波門驗證
設數學仿真的基本參數為:星點矢量



真實的旋轉軸
oE=

姿態(tài)機動每拍(200 ms)機動的角度0.003 rad。對機動后的oA,oB,oC的測量誤差引入0.001 rad的白噪聲進行干擾,仿真所得多矢量姿態(tài)與估計遞推算法輸出誤差如圖7所示。
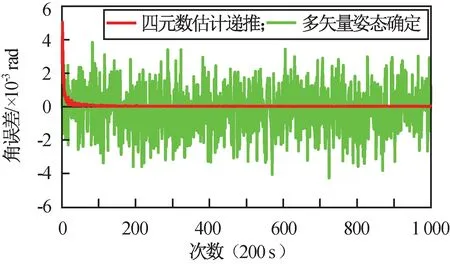
圖7 多矢量姿態(tài)與估計遞推算法輸出誤差Fig 7 Multi vector calculating attitude comparing with predict and estimating attitude method
由圖7可知:用本文波門遞推預估四元數方法鎖的結果不僅與真實姿態(tài)四元數誤差很小,而且抖動小于傳統(tǒng)用多矢量確定姿態(tài)的星敏感器輸出,其輸出曲線相對平滑。
為驗證本文方法在星敏感器采集星點出現大跳動誤差或錯誤時的有效性,引入第4個星點
oD=
[0.308 244 50 0.450 036 0 0.838 124 6]
其中針對該星點的測量時引入隨機誤差閾值0.01 rad的白噪聲,分別用波門遞推預估四元數、傳統(tǒng)多矢量定姿、改進剔除傳統(tǒng)多矢量定姿,以及不剔除誤差大星點波門遞推預估四元數4種方法進行處理,結果如圖8所示。

圖8 四種方法仿真結果比較Fig.8 Simulation results of four methods
由圖8可知:如未剔除誤差較大的星點,即使采用波門遞推預估四元數方法也會出現很大的抖動,從而使星敏感器的性能下降;如采用未剔除誤差較大星點,傳統(tǒng)多矢量方法的抖動相對較大,采用波門預測剔除誤差較大星點的改進多矢量方法,姿態(tài)輸出抖動也很大,但優(yōu)于無改進的傳統(tǒng)多矢量方法;采用剔除誤差較大星點的波門遞推預估方法,抖動較小,相對真實姿態(tài)誤差更小。
4 結束語
為使星敏感器在進行波門跟蹤時遇到采集星點存在大跳動誤差時也能快速進行星跟蹤和完成姿態(tài)輸出,本文給出了一種星敏感器無效星點數據優(yōu)先剔除算法和基于波門有效姿態(tài)快速遞推算法的解決方案。由仿真數學結果可知:該算法滿足有效剔除大跳動星點,能有效削弱在進行波門跟蹤時采集星點大跳動產生的對星敏感器的影響,同時改善星敏感器的輸出四元數姿態(tài)的精度,可明顯提高星敏感器的性能和安全可靠性。本文創(chuàng)新地利用波門遞推進行提前剔除大跳動星點,同時結合卡爾曼濾波又進一步增加姿態(tài)輸出的魯棒性。但由于波門跟蹤基于姿態(tài)遞推,在快速運動時,該方法會存在星跟蹤跟不上的現象,這也是本文方法的不足之處。后續(xù),將對在快速機動下星跟蹤的快速和穩(wěn)定輸出準備和穩(wěn)定的姿態(tài)進行研究。
[1] 章仁為. 衛(wèi)星軌道姿態(tài)動力學與控制[M]. 北京: 北京航空航天大學出版社, 2011.
[2] 朱長征. 基于星敏感器的星模式識別算法及空間飛行器姿態(tài)確定技術研究[D]. 長沙: 國防科學技術大學, 2004.
[3] 徐櫻, 吳德安, 汪禮成, 等. 星敏感器慢變誤差校準方法研究[J]. 上海航天, 2016, 33(4): 63-69.
[4] 張力軍. 基于多視場星敏感器的航天姿態(tài)確定方法研究[D]. 長沙: 國防科學技術大學, 2011.
[5] 姜雪原. 衛(wèi)星姿態(tài)確定及敏感器誤差修正的濾波算法研究[D]. 哈爾濱: 爾濱工業(yè)大學工學, 2006.
[6] 楊大明. 空間飛行器姿態(tài)控制系統(tǒng)[M]. 哈爾濱: 哈爾濱工業(yè)大學出版社, 2000.
[7] 謝俊峰. 衛(wèi)星星敏感器定姿數據處理關鍵技術研究[D]. 武漢: 武漢大學, 2009.
[8] 邢飛, 董瑛, 武延鵬, 等. 星敏感器參數分析與自主校正[J]. 清華大學學報(自然科學版), 2005, 45(11):1484-1488.
[9] 林玉榮, 鄧正隆. 基于星敏感器估計衛(wèi)星姿態(tài)的預測Kalman濾波算法[J]. 中國科學(E輯), 2002, 32(6): 817-823.
[10] 林玉榮, 鄧正隆. 基于星敏感器的星載慣性基準誤差的實時估計與補償[J]. 中國慣性技術學報, 1999(04).
[11] 李捷. 利用星敏感器的衛(wèi)星姿態(tài)確定的信息濾波[J]. 中國空間科學技術, 1995, 15(2): 15-21.
A Rapid Calculating Attitude Method for Star Sensor Based on Tracing Window Using Predicting and Estimating
LIU Teng-jun, LIN Rong-feng, ZHU Yan-qing, ZHOU Yu, XIAO Dong-dong
(Shanghai Institute of Spaceflight Control Technology, Shanghai 201109, China)
Taking the star sensor’s demanding for rapidity and stability and higher accuracy into consideration, a rapid calculating attitude method for star sensor based on tracing window using predicting and estimating was studied in this paper, because traditional star sensor showed star tracing failure and quaternion not being able to output while dealing with star points in tracing window having a big mistake jump. According to quaternion and attitude matrix, the extraction method of effective data was applied to reject the data of the ineffective and jumping star point based on distance. The various tracing windows related to different star points would be determined by predicting and estimating because individual star had its motion characteristic, which could reduce tracing failure caused by tracing window and multi-star identification failure. The setting of the tracing window parameters was improved. The tracing window was optimized. The ineffective star point was rejected according to the difference between the rotation angular computed and real rotational angular and the data set was updated. The new attitude quaternion was estimated by updated rotational angular and attitude quaternion. The numerical simulation results showed that this method could reduce the effect of large jumping star point on attitude determination greatly and improve the output accuracy of attitude quaternion for star sensor.
star sensor; tracing window; multi vector calculating attitude; predicting and estimating; star point jump; error star points eliminating; quaternion; tracing window parameter
1006-1630(2017)03-0116-06
2016-09-15;
2016-12-08
劉騰駿(1988—),男,碩士,主要研究方向為衛(wèi)星姿控系統(tǒng)軟件設計與開發(fā)。
V448
A
10.19328/j.cnki.1006-1630.2017.03.016
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56