基于前饋控制的交流伺服系統高速定位控制研究
2017-07-07 12:53:50曹耀文
進出口經理人 2017年6期
關鍵詞:研究
曹耀文
摘 要:前饋控制的交流伺服系統要求高速定位,采用傳統PID控制不能滿足這一要求。為解決這一問題,可以引入前饋控制來提高定位控制性能。通過進行仿真實驗,證明前饋控制可以提高系統對指令信號的跟蹤性能,再設計實驗系統。
關鍵詞:前饋控制;交流伺服;高度定位;研究
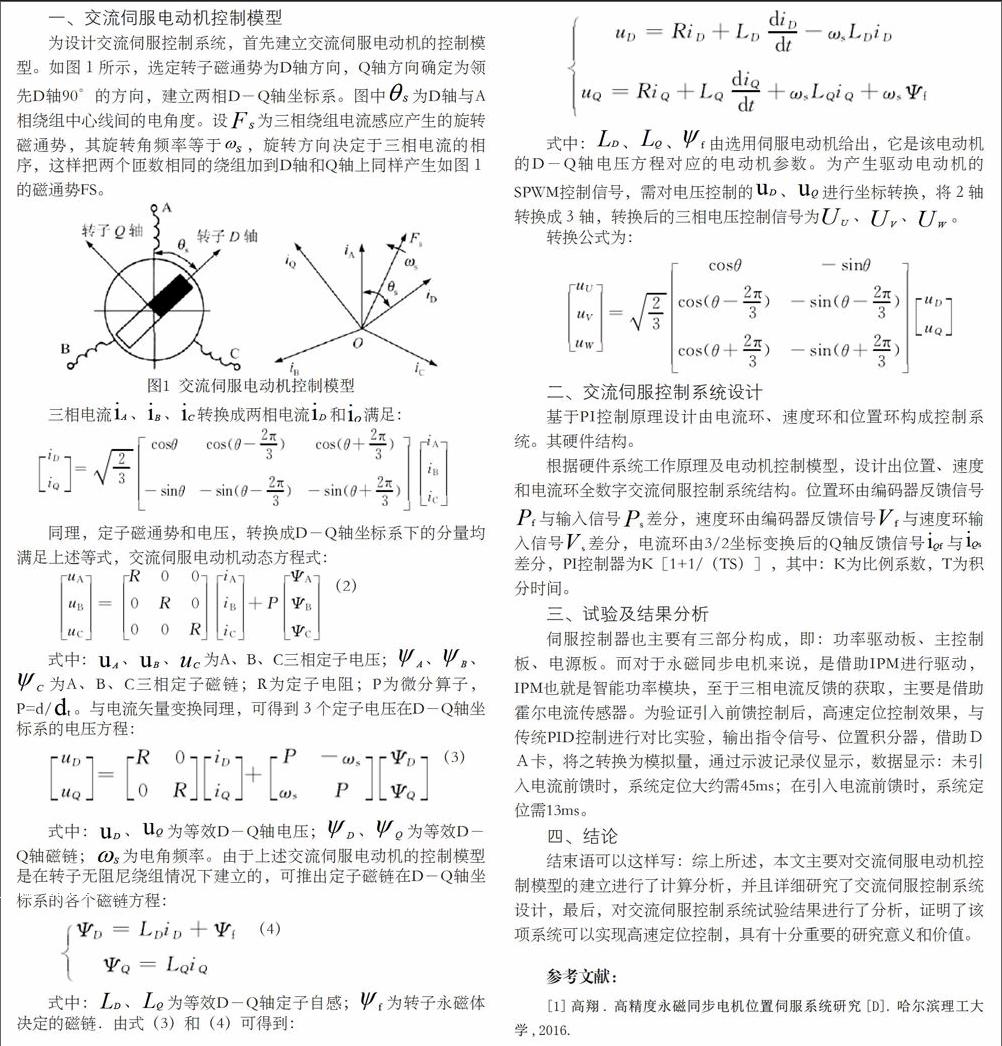
一、交流伺服電動機控制模型
為設計交流伺服控制系統,首先建立交流伺服電動機的控制模型。如圖1所示,選定轉子磁通勢為D軸方向,Q軸方向確定為領先D軸90°的方向,建立兩相D-Q軸坐標系。圖中為D軸與A相繞組中心線間的電角度。設為三相繞組電流感應產生的旋轉磁通勢,其旋轉角頻率等于,旋轉方向決定于三相電流的相序,這樣把兩個匝數相同的繞組加到D軸和Q軸上同樣產生如圖1的磁通勢FS。
二、交流伺服控制系統設計
基于PI控制原理設計由電流環、速度環和位置環構成控制系統。其硬件結構。
根據硬件系統工作原理及電動機控制模型,設計出位置、速度和電流環全數字交流伺服控制系統結構。位置環由編碼器反饋信號與輸入信號差分,速度環由編碼器反饋信號與速度環輸入信號差分,電流環由3/2坐標變換后的Q軸反饋信號與差分,PI控制器為K[1+1/(TS)],其中:K為比例系數,T為積分時間。
三、試驗及結果分析
伺服控制器也主要有三部分構成,即:功率驅動板、主控制板、電源板。而對于永磁同步電機來說,是借助IPM進行驅動,IPM也就是智能功率模塊,至于三相電流反饋的獲取,主要是借助霍爾電流傳感器。為驗證引入前饋控制后,高速定位控制效果,與傳統PID控制進行對比實驗,輸出指令信號、位置積分器,借助DA卡,將之轉換為模擬量,通過示波記錄儀顯示,數據顯示:未引入電流前饋時,系統定位大約需45ms;在引入電流前饋時,系統定位需13ms。
四、結論
結束語可以這樣寫:綜上所述,本文主要對交流伺服電動機控制模型的建立進行了計算分析,并且詳細研究了交流伺服控制系統設計,最后,對交流伺服控制系統試驗結果進行了分析,證明了該項系統可以實現高速定位控制,具有十分重要的研究意義和價值。
參考文獻:
[1]高翔.高精度永磁同步電機位置伺服系統研究[D].哈爾濱理工大學,2016.
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19
