爬壁機器人氣壓吸附及磁吸附專利技術(shù)綜述
2017-07-09 15:23:27趙彥文黎開虎
科學(xué)與財富 2017年18期
趙彥文+黎開虎
摘 要: 爬壁機器人可以吸附在不同材質(zhì)的垂直或者傾斜面上,進(jìn)行各種極限條件下的作業(yè)任務(wù),氣壓吸附和磁吸附方式是爬壁機器人技術(shù)領(lǐng)域最成熟應(yīng)用最廣泛的吸附方式。
關(guān)鍵詞: 機器人;爬壁;吸附
前言
爬壁機器人是移動機器人領(lǐng)域的一個重要分支,它把地面移動機器人技術(shù)與吸附技術(shù)有機結(jié)合起來,可在垂直壁面上附著爬行,并能攜帶工具完成一定的作業(yè)任務(wù),大大擴展了機器人的應(yīng)用范圍。本文將著重對爬壁機器人氣壓吸附及磁力吸附的專利技術(shù)發(fā)展路線進(jìn)行梳理。
1.爬壁機器人吸附方式概述
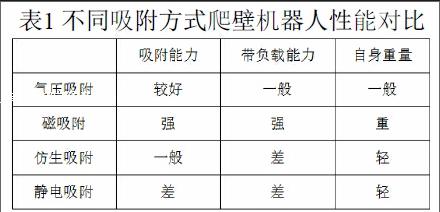
攀爬機器人的設(shè)計需要針對工作任務(wù)、環(huán)境,選擇合適的吸附方式。目前,吸附方式主要有氣壓吸附、磁吸附、仿生吸附以及靜電吸附,這些吸附方式有各自的優(yōu)勢,也有各自的局限性,所研制的爬壁機器人往往針對性較強,例如在玻璃或光滑壁面上工作時,主要采用真空吸附或者仿生吸附,在鋼制壁面上主要采用磁力吸附,在金屬等材料相互混雜的壁面上主要采用靜電吸附,在復(fù)雜壁面上或者是彎曲壁面上大多采用混合吸附方式。各種吸附方式的性能對比,參見表1。
2.氣壓吸附及磁吸附的發(fā)展路線
2.1 氣壓吸附
真空吸附法是通過真空發(fā)生裝置,使吸盤內(nèi)腔產(chǎn)生負(fù)壓,機器人利用吸盤內(nèi)外的壓力差貼附在壁面上。真空吸附法由于不受壁面材質(zhì)的限制,適應(yīng)范圍廣,但當(dāng)壁面凹凸不平時吸盤容易漏氣,從而吸附力下降,承載能力降低。推力吸附借鑒了航空技術(shù),使用螺旋漿或涵道風(fēng)扇產(chǎn)生合適的推力,使機器人穩(wěn)定、可靠地貼附在壁面上,并在壁面上移動。這種吸附方式具有壁面適應(yīng)性好,越障容易等優(yōu)點,但控制系統(tǒng)復(fù)雜。
在氣壓方面,從最初的日本大阪府立工學(xué)部的西亮教授于1966年研制出來的垂直壁面移動機器人樣機,利用電風(fēng)扇進(jìn)氣側(cè)的低壓作用作為吸附力開始,一直到1973年才有正式記錄的專利申請,即專利申請?zhí)枮镴P4607373A的由日本的本田技研工業(yè)株式會社申請的利用風(fēng)扇吸氣產(chǎn)生內(nèi)部外部壓力差的爬壁機器人,后期針對氣壓的爬壁機器人進(jìn)行了相應(yīng)的改進(jìn),但問題在于,這些改進(jìn)更多的是集中在爬壁機器人的行走方式上,而對于吸附方式卻沒有實際意義的革命性發(fā)展;到1995年由本田技研工業(yè)株式會社就利用負(fù)壓吸盤進(jìn)行吸附的爬壁機器人申請了專利,專利申請?zhí)枮镴P1820995A;之后的一段時間內(nèi)針對單吸盤與多吸盤的氣壓式吸附爬壁機器人專利申請量很大,而這些申請里大多是利用輪式、履帶式作為行走方式的;到2001年,有ASPECT與日立公司聯(lián)合申請的利用真空泵抽出吸盤內(nèi)的氣體,利用真空的低壓進(jìn)行吸附的爬壁機器人,專利申請?zhí)枮镴P2001253768A。
在之后的發(fā)展中,中國的大專院校占據(jù)了絕對的申請量,在質(zhì)量上也非常的優(yōu)秀,如2007年哈爾濱工業(yè)大學(xué)申請的仿蜘蛛吸盤機器人,專利申請?zhí)枮镃N200710072319;2008年北京理工大學(xué)申請的負(fù)壓與反推力結(jié)合實現(xiàn)的吸附方式,專利申請?zhí)枮镃N200810227554,需要強調(diào)的是該專利將兩種吸附方式進(jìn)行結(jié)合,可以有效的提高吸附的成功率與穩(wěn)定性;2012年華東理工大學(xué)申請的針對不平墻面的非接觸吸附,專利申請?zhí)枮镃N201010617410,該申請針對非平整墻面的吸附方式進(jìn)行了相應(yīng)的改進(jìn)。
2.2 磁吸附
磁吸附法要求壁面必須是導(dǎo)磁材料,但它結(jié)構(gòu)簡單、吸附力大,對壁面的凹凸適應(yīng)性強,不存在氣壓吸附法的漏氣問題,因而當(dāng)壁面材料導(dǎo)磁時,使用磁吸附式爬壁機器人有它突出的優(yōu)點。
在磁力吸附方面,最早的申請來自UNIVERSAL CRAWLER CO LTD申請的履帶式電磁吸附爬壁機器人,專利申請?zhí)枮镈E2413688A,該申請利用履帶的連續(xù)性以及與墻壁接觸面積大的優(yōu)點,可以使爬壁機器人能夠向履帶式全地形車在地面上行走一樣,可以在墻壁表面持續(xù)的全方向行走,為爬壁機器人的工業(yè)推廣奠定了基礎(chǔ);之后到1985年株式會社東芝就利用永磁體的爬壁機器人申請了專利,專利申請?zhí)枮镴P7356884A,相對于電磁吸附,永磁吸附的優(yōu)點在于,其可以提供持續(xù)的吸附力度,缺點在于磁力的開啟與切斷較難實現(xiàn),以及吸附力的控制方面可能弱于電磁體;1992年日立金屬公司就履帶式永磁體吸附方式技術(shù)申請了專利,專利申請?zhí)枮镴P30956992。
在90年代之后,中國在磁吸附方面的專利申請量開始呈現(xiàn)爆發(fā)之勢,這也得益于中國在90年代開始在工業(yè)方面開始大踏步前進(jìn),促使了工業(yè)爬壁機器人的需求量增加。2005年,清華大學(xué)就利用非接觸式永磁吸附方式的爬壁機器人申請了專利,專利號為CN200510086383;2010年,九江精密測試技術(shù)研究所就磁吸附與推力吸附復(fù)合吸附申請了專利,其利用兩種吸附方式結(jié)合的創(chuàng)新,使爬壁機器人在吸附穩(wěn)定方面取得了一定的進(jìn)步,申請?zhí)枮镃N201020548859;2012年浙江大學(xué)就曲面自適應(yīng)磁吸附裝置,利用了磁輪加磁塊的磁吸附方式申請了相關(guān)專利,專利申請?zhí)枮镃N201210540925。
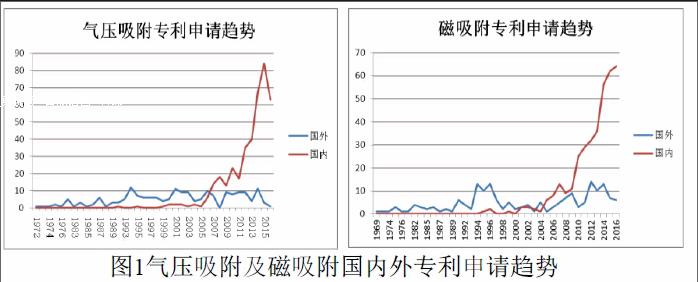
2.3氣壓吸附及磁吸附國內(nèi)外專利申請趨勢
雖然國內(nèi)氣壓吸附與磁吸附爬壁機器人專利申請相對于國外起步略晚,但之后的發(fā)展速度很快,在2005年之后國內(nèi)申請量已經(jīng)遠(yuǎn)遠(yuǎn)超過了國外,也從側(cè)面顯示出我國在氣壓吸附及磁吸附爬壁機器人領(lǐng)域的取得了一定的成績。
3 結(jié)語
爬壁機器人吸附方式仍然是爬壁機器人研究的熱點,也仍然是爬壁機器人應(yīng)用推廣的瓶頸。其中,氣壓吸附和磁吸附技術(shù)已經(jīng)非常成熟,在許多領(lǐng)域都有比較好的應(yīng)用,而且國內(nèi)的相關(guān)專利申請在“量”上已經(jīng)遠(yuǎn)超國外,但是今后在“質(zhì)”方面還有更進(jìn)一步的空間。另外,需要強調(diào)的是仿生吸附和靜電吸附也是未來爬壁機器人吸附領(lǐng)域的發(fā)展熱點,這需要國家和企業(yè)更多的資金投入以及高校和研究所更多的技術(shù)投入。■
