城市軌道交通列車自動控制原理簡述
2017-07-10 16:51:46李翔
科學與財富 2017年20期
李翔
(浙江眾合科技股份有限公司 信號事業部 浙江杭州 310000)
摘 要:在城市軌道系統中,列車運行的自動控制是整個機電系統中最核心的部分之一。本文將從城市軌道交通信號系統的角度簡要描述列車自動控制的主要元素和實現方式。同時,簡單指出在列車的自動控制過程中需要注意的其它問題。
關鍵詞:城市軌道;交通列車;自動控制
1列車自動控制的主要元素:
信號系統為了按照運營需求實現列車運行的自動控制,主要需要以下幾個要素:
列車當前的速度
列車當前的位置
列車當前的目標停車點
1.1列車當前的速度
列車通過讀取輪軸上安裝的速度傳感器直接獲得實時速度。為了獲得更為準確的速度值,一般情況下,速度傳感器都安裝在非動力軸上以防止突然的制動或牽引可能引起的打滑或空轉對速度探測準確性的影響。即便如此,因為各種原因,列車非動力軸的打滑和空轉仍舊不可避免。因此,信號系統一般仍舊會通過加速度計或者雷達等設備對上述情況下的速度進行補償已保證速度探測的準確性。
1.2列車當前的位置
在整條線路的設計之初,設計單位根據線路情況會定義本條線路的設計0點,以此為基礎使用公里標來定義軌道線路上相關元素的位置。例如:某站臺的停車位置為12KM+456.34M。列車確定當前位置的常用方法是通過讀取線路上按照一定規則布置的位置信標來獲取基準位置,在此基礎上通過實時速度的積分運算來更新實時位置。
1.3列車當前的目標停車點
列車的目標停車點由信號系統的其它部分通過整個軌道系統的整體情況實時計算得出,并通過網絡發送至列車。一般情況下,列車的目標停車點都為下一站的站臺位置。在站臺出現問題或前方軌道有列車占用等情況下,列車當前的目標停車點有可能會被設置在區間。
2列車自動控制的實現方式:
信號系統的主要目標之一就是根據時運營需求來控制列車。其實在安全前提下,以最高的效率使列車運行至下一停車點是自動控制核心任務,完成這個任務需要三個步驟:
采集相關信息得到目標運行曲線;
控制車輛以目標曲線完成運行;
站臺精確停車。
2.1目標運行曲線的形成:
以一次正常的停站過程為例:當列車從本站完成上客和站臺的開關門操作后,信號系統會檢測本站至下一站的路徑上是否存在異常、下一站的站臺情況是否正常。正常情況下,系統將判斷列車應正常行駛至下一站停車點。
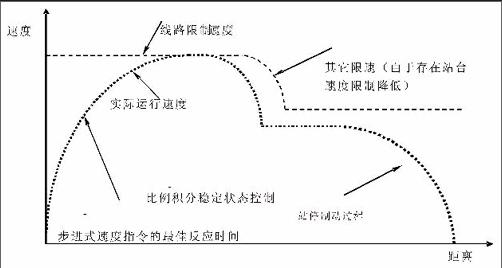
同時,為了使列車更快速地到達下一站停車點,在安全的前提下,系統將盡量使列車高速運行。這些需要考慮地安全因素主要有:線路允許運行的最高速度,列車最大的制動率,因為彎道或防震的要求而在線路上人為設置的限速等。
經過以上過程,系統將在內部生成一條速度-距離的目標控曲線,見圖:
值得指出的是:因為列車速度、位置可能會因為各種原因與預計的數值不同,線路實際情況也可能在列車運行過程中發生變化,所以上述目標控制曲線是基于列車當前的速度、位置以及線路情況而實時計算并更新的。
2.2控制車輛以目標曲線運行:
控制車輛以目標曲線運行的核心就是實時控制列車的速度。信號的控制系統與列車通過列車管理系統進行接口,通過該接口將牽引和制動指令實時發送至車輛,車輛按照收到的指令對列車進行實時操控。
為了實現精確控制的目的,發送給車輛的牽引和制動指令在時間和精度上的要求都非常高。指令的更新周期要求為毫秒級,制動和牽引力的指令為百級以上(人工駕駛時一般牽引為4級,制動為7級)。
列車速度的實時控制采用傳統的比例積分微分處理器進行閉環控制。控制系統實時對比觀測速度與給定速度的差值,通過比例積分計算得出此刻需要的牽引或制動力,實時傳輸給列車執行。下一個運算周期再觀察列車變化后的速度并再一次與變化后的給定速度進行對比和計算,進而更新牽引或制動指令。以此實現列車速度的實時控制。
2.3站臺精確停車
當列車運行至距離車站一段距離的預設位置時,就會初始化程序進入站臺停車過程。站臺停車過程與兩站之間的區間運行過程的控制理念從原理上基本一致,但精度要求更高。
一般情況下:城市軌道要求的站臺停車位置精度為±30CM,為了滿足停車精度,會在站臺區域停車點前按照一定的原則布置更多的位置信標以更頻繁地校準列車的絕對位置以減少列車的定位誤差以達到精確停車的目的。
一旦列車停止,CC會發出制動力要求(通常為70%的制動力)來禁止列車移動以保證列車停穩在站臺。至此,一次正常的停站過程就完成了。
3列車自動控制的需考慮的其它問題
在實際應用中,除了通過實時的自動控制將列車運行至目標停車點以外,控制系統還要兼顧考慮很多其它問題。常見的問題有舒適性、節能、安全防護等。
為了保證列車上乘客的乘車舒適性,控制系統通過限制列車運行的沖擊率(加速度的變化率,常用單位為m/s3)來達到目的。沖擊率分為與行車方向同向的縱向沖擊率和與運行方向垂直的橫向向沖擊率。為了限制列車運行的沖擊率,控制系統實時發送給列車的牽引和制動指令的變化率將有一定的限制。
節能方面,控制系統通過全局考慮,在生成目標控制曲線時,首先盡量增加整個列車運行過程中惰行的時間,減少牽引和制動的次數以減少動力使用。其次在牽引和制動的過程中盡量減少牽引和制動力變化的幅度以減少為了抵抗慣性所耗費的動力。
故障防護的主要原則就是在發現不安全因素時,控制系統將列車停止下來提示相關人員進行安全狀態確認或隱患排除。常見不安全因素有:
控制系統本身故障;
列車牽引/制動系統故障;
列車車門或站臺屏蔽門非正常打開;
前方軌道突然出現異物占用;
車輛或站臺上設置的緊急停車按鈕被按下等。
4總結:
可見,列車的自動控制主要是在考慮安全和效率等因素的前提下,基于精確的位置和速度判斷,結合整個線路的動態高頻率地更新控制指令以滿足列車自動運行的需求。
參考文獻:
[1]豐文勝, 黃鐘. 城市軌道交通列車自動控制系統的標準化設想[J]. 城市軌道交通研究, 2002, 5(4):36-38.
[2]徐金祥. 城市軌道交通列車運行自動控制技術(高等學校城市軌道交通系列教[M]. 中國鐵道出版社, 2013.
[3]徐金祥. 城市軌道交通列車運行自動控制技術[M]. 中國鐵道出版社, 2013.
[4]肖雅君, 吳汶麒. 用于軌道交通列車自動控制系統的通信技術[J]. 城市軌道交通研究, 2002, 5(2):59-64.
[5]劉翔. 城市軌道交通列車自動運行(ATO)最優控制策略的研究[D]. 北京交通大學, 2011.