簡述無刷直流電機
2017-07-12 17:01:50陳天殷
汽車電器 2017年6期
陳天殷
(美國亞派克機電(杭州)有限公司,浙江 杭州 310013)
簡述無刷直流電機
陳天殷
(美國亞派克機電(杭州)有限公司,浙江 杭州 310013)
介紹無刷直流電機的原理結構和特點,發展趨勢和相關的研究進展。介紹無刷電機在汽車中燃油泵、電子轉向、發動機控制和電動車輛控制的應用現狀,可達到的主要參數和性能指標。
無刷直流電機;工作電壓;工作壽命;可靠性
1 無刷直流電機概述
應對環境保護標準,汽車的能效法規日益嚴格;消費者對節能、安全、便捷和舒適度提出更高的要求,都推動汽車功能電子化趨勢日益加強。目前的汽車已不再是當初單純的機械產品,已成為復雜度足夠高的機電一體化產品。國際汽車權威組織預測,至2020年,一輛豪華車中的電機數量可多達120臺。無刷直流電機具有優異的性能,能實現更高的能效和性價比,在數字電子技術飛速發展過程中,無刷直流電機被整合至汽車的執行元件中,如散熱風扇、暖通空調(HVAC)、刮水器、燃油泵、水泵、油泵、座椅風扇和混合動力系統等部件里。
無刷直流電機(英文為Brushless DC Motor, 簡寫為BLDC)屬于一種極典型的機電一體化的基礎產品,作為執行元件的電機與其控制裝置緊密關聯,構成能完成復雜功能的自動化器械。無刷電機中無電刷和換向器或集電環一類的機械構件,由晶體管電路電子換向將交流轉換為直流,以及直流逆變為交流。無須顧忌磨損、粉塵、噪聲、火花和高強度的電磁干擾,并為汽車內特定的應用提供良好的無級變速控制。國際汽車權威組織稱,無刷電機顯著地提升燃油能效和燃油經濟性,節省60 %~70 %的能耗;無刷電機用于電動助力轉向(EPS),行駛距離會增加 3 %~5 %;用于電動水泵(EWP)及電動油泵(EOP),提升約1 %~3 %的能效。
無刷電機是成熟于20世紀末的新產品,由于它高效、低噪、免維護、高可靠等種種優勢,正快速普及至家用電器、醫療器械、工業自動化設備儀器儀表和航天航空,自然也有汽車行業。與有刷直流電機和感應電機相比,BLDC優勢顯著,包括:極佳的轉矩-轉速特性,高速的動態響應,高效率,極寬的無級可調的轉速范圍,運轉無噪音,高可靠性,使用壽命長。
2 無刷直流電機的結構
無刷直流電機結構形式類似交流同步電機,藉電力電子技術(逆變器)輸入交流信號到電機。該交流信號并不一定是傳統的工頻正弦波,而是雙向的直流電,當然有一定的紋波。最簡化的實用形式是兩組永久磁鋼及兩組線圈輪流開關通電,線圈作為定子,永久磁鋼組成轉子。線圈與磁鋼的中心線一致時,斷開該組線圈,啟動下一組線圈,這樣電機就周而復始旋轉。圖1為儀表冷卻風扇示意圖。
無刷電機相對其它類型,其電機的單位體積輸出轉矩更高。因而在需要重點考慮空間和質量因素的應用場合,大有用武之地。無刷電機的定子由沖壓出齒和槽的硅鋼片疊片疊壓而成,若是分布繞組就類同三相感應電機,沿著圓周表面空間分布的三相繞組,嵌入在電機的槽中。三相繞組常常采用星形連接,繞組通以時間上隨梯形或正弦規律變化的電流,即產生旋轉磁場。與轉子上分布粘接的高磁能積的片狀永磁體作用形成旋轉轉矩。圖2為內轉子型無刷電機工作原理圖。三相繞組應用的不是50 Hz的工頻交流電,而是由控制器內脈寬調制(PWM)線路出來的、占空比可調的交變電流。
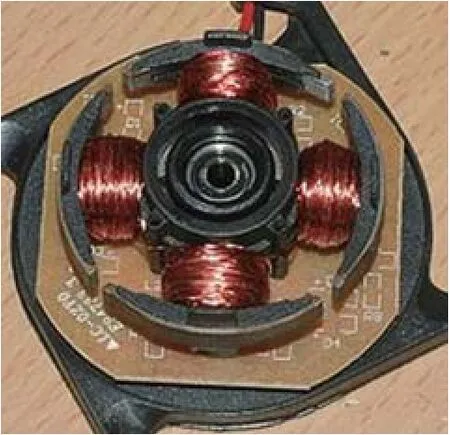
圖1 儀表冷卻風扇

圖2 內轉子型無刷電機工作原理
外轉子型無刷電機,定子鐵心的外圓周表層的齒槽嵌入三相繞組,也常是星形連接。扇弧形的稀土磁鋼粘接在外轉子的內圓周表面。常見的電動自行車后輪輪轂里的電機,便是外轉子無刷電機,有8對尺寸相同的釹鐵硼(NdFeB)稀土磁鋼的磁極,N、S交替排列,內定子有48槽的定子鐵心,嵌入三相繞組,每極每相槽數為1,相鄰的槽中為非同相的繞組。3個位置傳感器放置在毗鄰的定子槽表層,輸出信號間的相移為120 o。控制單元和汽車儀器儀表的冷卻風扇、風葉與外轉子注塑一體,也是常見的無刷電機。
3 無刷直流無刷電機的基本原理
無刷電機可配置為單相、兩相和三相等3種類型,定子繞組的組數與其類型相對應。三相因其轉矩脈動最小,廣受歡迎,使用最為普遍,是本文的討論對象。
位置傳感器實現精確的電子換向;脈寬調制(PWM)產生交變電源,是無刷電機兩項核心技術。
3.1 位置傳感器
識別和確定各相繞組與磁極(中心線)相對位置,以決定如何實現各繞組精準的換向,須運用快速反應的位置傳感器。目前無刷直流電機中廣泛應用的是霍爾傳感器,體積極小、可靠性好、靈敏度高、分辨率極高。霍爾傳感器放置的位置取決于控制的需要,傳感器輸出電信號之間的相序可以是60°或120 °。設計控制器時據此安排并遵循其換向順序。
連帶著電源線和信號線的必是定子。圖3為拆分的外轉子無刷電機。定子左下方的引線,上邊白藍紅黑4條粗線是ABC三相的電源線和星點中線,下面較細的是3個位置傳感器霍爾元件信號線。手持的外轉子兩對弧形永久磁鋼,粘接在剩磁極小牌號為DT3、DT4一類的電工純鐵或含碳量極低的低碳鋼(8號、10號鋼)制作的磁軛圈內壁。

圖3 外轉子無刷電機
無刷直流電機以電子控制的方式精準地實現換向。欲使無刷電機正常可控地旋轉,必須按照一定的順序給定子繞組依次通電。而確定各相繞組依次通電的順序,須明確每一瞬間繞組相對于轉子磁極的位置。實際轉子的相對位置,是由鑲嵌在定子表面3個相鄰而不同相的霍爾效應傳感器檢測、標定并輸出信號。每當轉子經過某一霍爾傳感器,便會發出一高電平信號,表示N極或S極正經過該傳感器。根據這3個霍爾傳感器信號的組合,即可確定換向的精確順序。
當電流通過磁場的時候,磁場會對導體產生一個垂直于電子運動方向上的的作用力(洛倫茲力),在導體的兩端建立穩定的電勢差,即為霍爾效應,見圖4。
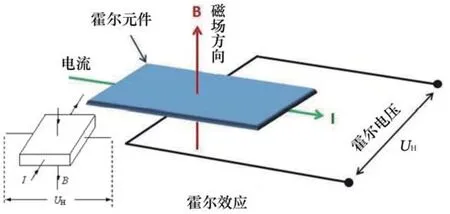
圖4 霍爾效應
霍爾效應的原理可用下述公式概括

式中:E——霍爾效應電壓;K——霍爾器件的靈敏度,是常數;I——霍爾器件的工作電流;B——外部磁場的磁感應強度;θ——I與B的垂直角度的偏差。
顯然,在K、B、I、θ4個物理量中,若確定其中3個,剩下一個即是被測量的量。而檢測霍耳電壓的大小可判斷磁鋼與霍爾元件的相對位置。
對一個給定的霍爾器件,當偏置電流 I 固定時,UH將完全取決于被測的磁場強度B。霍爾薄片兩端通以控制電流I,并在薄片的垂直方向施加磁感應強度為B的勻強磁場,則在垂直于電流和磁場的方向上,將產生電勢差為UH的霍爾電壓。
圖5為霍尼韋爾(Honeywell)公司生產的型號為SS41的位置傳感器。該元件實際尺寸僅為一粒綠豆的半瓣大小,印有型號和企業名的小平面裝置在垂直于永磁體磁力線的位置——或說該面需與永磁體表面平行。3條引接線自下而上依次為5 V電源、搭鐵腳和輸出腳。傳感器的六面體外表制作成倒碶形,便于嵌入鐵心的梯形沖槽槽楔位置里,作為槽楔的一部分。

圖5 霍爾傳感器
霍爾傳感器工作電壓為4~24 V,所需電流為5~15 mA。設計控制器時,查閱電機技術規范和傳感器的元器件產品樣本,即可明確該選用的霍爾傳感器類型和型號。霍爾傳感器的輸出通常采用集電極開路的類型。
電機的原理是載流導體在磁場中受力產生轉矩。定子繞組如果通有相序為120°的三相交變電流,再通過電子換向精巧的安排,確保輸出方向一致,即輸出為最大轉矩。該轉矩也可以理解為定子繞組產生的交變磁場與永磁體之間相互作用而產生。轉矩峰值出現在兩個磁場正交之時,而平行時最弱。為確保電機正常旋轉,電子換向需使定子繞組各個導體中的電流所產生的磁場與相對永磁體位置的磁場分布有最大轉矩產生。圖6為霍爾傳感器輸出信號與其他參數示意圖,有助于解析認識六步換向。
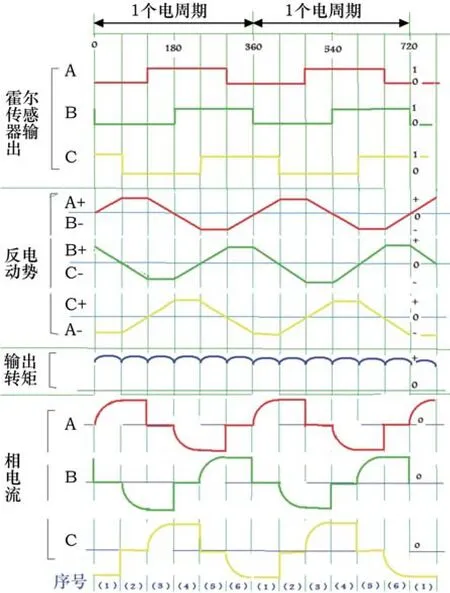
圖6 霍爾傳感器輸出信號與其他參數示意圖
由圖6中可以看出,電機輸出轉矩是脈動的,但幅值變化并不大。2個電周期完成電機輸出軸在機械上的一周旋轉運動。
圖7為霍爾傳感器給各繞組充電順序示意圖,與圖6標識的序號對應。
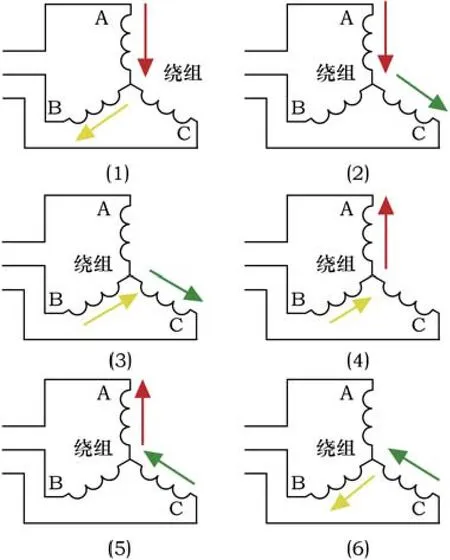
圖7 霍爾傳感器給各繞組充電順序示意圖
從圖6、圖7可以看到每一次的換向(一個序號)都有一相繞組連接到控制電源的正極(電流流入繞組),第二相的繞組連至負極(電流從其中流出),第三相繞組處于失電狀態(為0)。這樣,6個序號3組繞組依次輪換工作,完成六步換向。從圖7看出,每當轉過60 o,霍爾傳感器就會改變一次狀態,在同步模式下,每轉過60 o相電流變換一次。2個電周期對應于完整的轉子輸出軸1個機械旋轉周期。每對磁極需要完成1個電周期,所以,電周期數/轉數=定子或轉子永磁體的磁極對數。
3.2 PWM調制方式
無刷電機使用直流電源,電機繞組里流動的是交變電流。圖8為實現無刷電機控制的原理框圖。T1~T6是由單片機控制的功率開關。根據無刷電機的電壓、額定電流,這些開關可以是MOSFET或IGBT,也可以是簡單的雙極性晶體管。
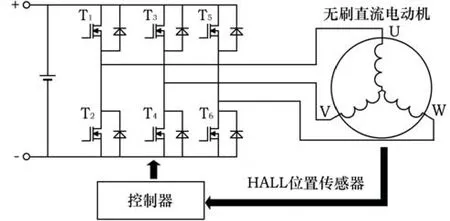
圖8 無刷直流電機PWM調制方式的實現
表1、表2為電機順時針和逆時針旋轉時各項電流的相位順序。
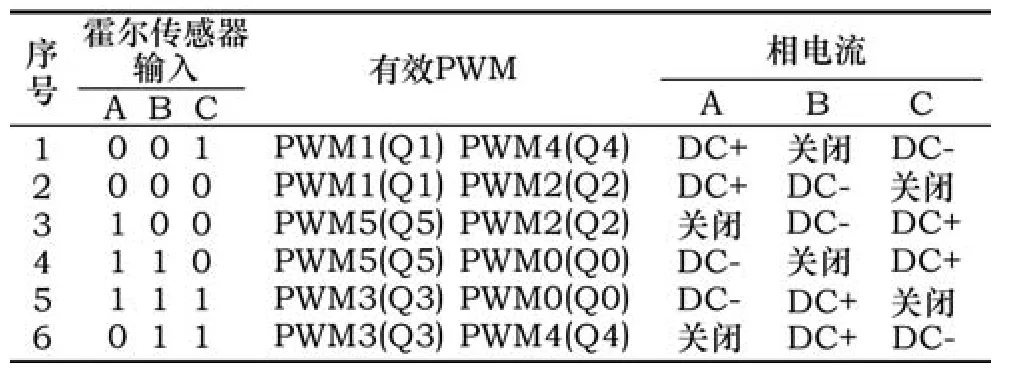
表1 電機順時針旋轉時的順序
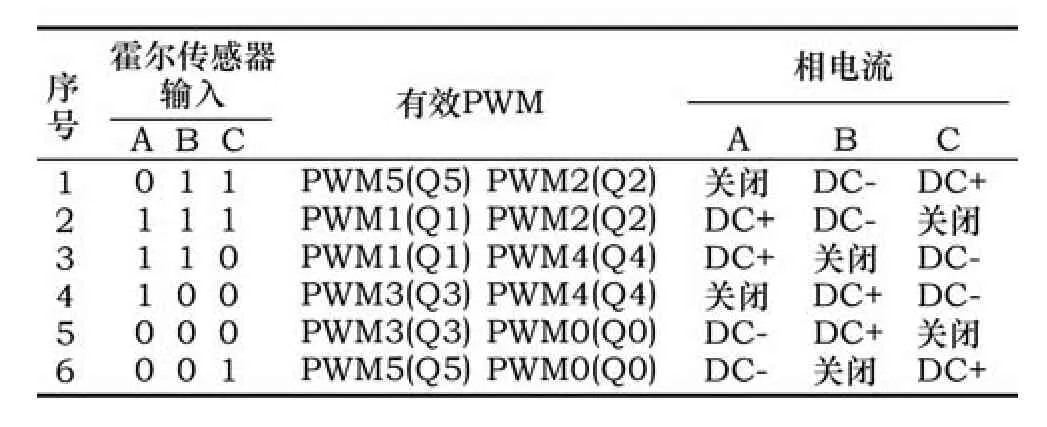
表2 電機逆時針旋轉時的順序
例如,替代傳統刮水器有刷直流電機的無刷電機需要轉速無級可調,這都由脈寬調制PWM來實現的。
無刷電機控制框圖見圖9。其控制器為美國微芯科技公司(Microchip)生產的型號為PIC18FXX31的單片機。PWM0 ~ PWM5的信號根據規定的順序在導通(On)和關斷(Off)之間切換,電機以額定轉速運行。如果需調節轉速,信號必須以遠高于電機頻率的交變頻率進行脈寬調制PWM,一般情況下,PWM的頻率至少在電機頻率的10倍以上。PWM的占空比在一次換向過程中變化時,提供給繞組的平均電壓會降低,從而使轉速降低。必須注意是:若直流母線電壓遠高于電機的額定電壓,可通過限制PWM的占空比來控制電機。這樣極大地增加了汽車中應用的靈活性,可使控制器與標識不同額定電壓的電機協同工作,通過控制PWM的占空比,使控制器的平均輸出電壓與電機額定電壓相匹配。
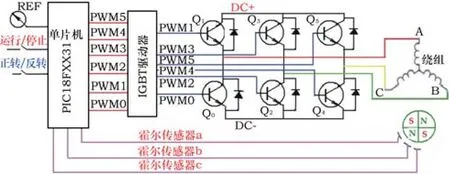
圖9 無刷電機的控制框圖
與模數轉換器通道相連接的定位器(圖9左上角的“REF”) ,用于設置轉速的基準電壓,將根據該輸入電壓計算PWM的占空比。
和所有現代機電一體化的產品一樣,為了提高控制精度,控制信號會在被控制的輸出中給出一路反饋,返回到控制器輸入端,根據控制結果不斷實時調整、補償和修正控制信號,這種“旁鏈”的方式叫閉環控制。
實際應用時,通過測量電機實時轉速來實施閉環控制。先計算設定轉速與實時轉速之間的允許誤差,用PID (比例–積分-微分, Proportional Plus- Integral plus-Derivative) 控制器放大轉速誤差,動態調整PWM的占空比。PID一般由如下表達式表示

式中:Kp ——比例控制,輸出與輸入誤差信號成正比關系,即將誤差固定比例修正,但系統會有穩態誤差;Ti——積分控制,當系統進入穩態有穩態誤差時,將誤差取時間的積分,即便誤差很小也能隨時間增加而加大,使穩態誤差減小直到為零;Td——微分控制當系統在克服誤差時,其變化總是落后于誤差變化,表示系統存在較大慣性組件或(且)有滯后組件。微分即是預測誤差變化的趨勢,以便提前作用避免被控量嚴重沖過頭。
如果要求高分辨率的轉速測量,常在電機上安裝光電式編碼器,它會給出有90o相位差的2個信號,以此判定電機的轉向與轉速。多數編碼器還給出第3個索引信號(排序的數據結構),電機每轉動一周發出一個脈沖,被作為定位應用。廠商提供的光電式編碼器有不同的型式可供選用,范圍在數百至數千脈沖/轉。
對于低分辨率低成本的轉速要求,可用霍爾元件信號測量轉速反饋。對驅動器必須有過載、過壓、堵轉及欠壓等保護措施。
3.3 無傳感器控制的無刷電機
無刷電機還能通過監視反電動勢信號來換向。霍爾傳感器的信號和反電勢間的關系見圖6。霍爾傳感器信號會在反電動勢電壓極性由正變為負或負變為正的瞬間改變狀態。理想情況下,在反電勢過零值時發生,但由于繞組的電感特性而會有延時,該延時可由單片機設置成自動補償。
電機轉動時每個繞組都會產生反電動勢E,根據楞次定律,其電壓大小與轉子角速度ω、轉子永磁體的磁感應強度B、轉子的長度l、直徑r和定子繞組每相的匝數N成正比,其方向與提供給繞組的電壓相反。圖10為無傳感器的無刷直流電機控制框圖。

圖10 無傳感器的無刷直流電機控制框圖
特殊情況時,由于反電動勢與轉子的轉速成正比,在轉速極低的情況下,反電動勢的幅值會極低,很難檢測到過零之點。故當電機由靜止狀態啟動時,必須采用開環控制,待有能夠檢測到過零之點的反電動勢時,才由反電動勢檢測控制。可檢測到反電動勢的最低轉速通過該電機的反電動勢常數計算得出。
這種方案無需霍爾傳感器,省略了電機與霍爾傳感器配套的永磁體,簡化了結構,節約了成本,減少了元器件,提高了電機可靠性。
4 無刷電機特性
4.1 轉矩-轉速特性
無刷電機的最大轉矩和額定轉矩,分別表征了電機的峰值轉矩和以均方根值表達的平均連續轉矩。圖11為無刷電機的轉矩-轉速特性圖。連續運轉時,電機的負載會增加直達額定轉矩。在轉速達到額定轉速之前都保持轉矩不變。電機運轉可能達到的最大轉速是額定轉速的150 %,超過額定轉速后,轉矩開始下降。
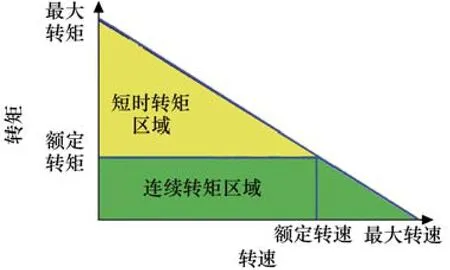
圖11 無刷電機的轉矩-轉速特性圖
經常帶負載啟動、停止和反轉應用,需要比額定轉矩更大的轉矩,尤其是當電機從靜止狀態啟動并加速時,需要瞬間的最大轉矩來完成,克服負載和電機自身的慣量。電機按轉矩-轉速曲線運轉,既能提高更高的轉矩,又可達到最大的峰值轉矩。
當電機以額定轉速運行時,反電動勢與供電電壓間的電壓差足以使電機維持額定電流,提供額定轉矩。若超過額定轉速,反電動勢顯著增長,即會降低繞組兩端的壓降,減小電流,使轉矩曲線下降。轉速曲線的的最終一點表示供電電壓等于反電動勢與電機中壓降損失之和,這時電流和轉矩皆為零。
無刷電機響應快捷,有較大的啟動轉矩,從靜止至額定轉速,具備提供額定轉矩的性能。直流電機欲實現額定負載下恒定轉矩的性能,電樞磁場與轉子磁場需恒定地維持90o,由電刷換向器及電刷放置在相對于磁極的位置來實現。機械換向的弊端導致其逐漸淘汰。電子換向因為半導體技術的飛速發展,關鍵部件微處理器(單片機)性能大幅提升,可實現將交流電機控制置于一周旋轉的兩軸直角坐標系統之中,適當控制交流電機在兩軸的電流分量,達到類似直流電機控制并有直流電機轉矩相當的性能。
無刷直流電機機械特性和調節特性線性度好、調速范圍寬,但高性能的應用場合需要電流反饋來進行轉矩控制,需要匯線電流反饋來防止電機和驅動系統過流。通過增加電流閉環控制可實現極快的電流源逆變器一般的性能,被稱為電流調節電壓源逆變器。驅動中的直流電壓調節既可通過直流電源逆變器的可控整流器來實現,也可通過在變換器中將脈寬調制信號施加在上開關或下開關來實施。圖12為A相(紅色)導通時的工作情況。無刷電機與有刷直流電機對比見表3,與感應電機對比見表4。

圖12 A相(紅色)導通時的工作情況

表3 無刷電機與有刷直流電機對比

表4 無刷電機與感應電機對比
4.2 無刷電機的特點
1)能低速大功率大轉矩運行,直接驅動大型負載。無須笨重的機械式減速機,不僅可替代異步電機+減速機調速,亦可替代變頻器+變頻電機調速或低效率的直流電機調速。
2)能量轉換效率高,電機本身無勵磁和碳刷換向器損耗;低速運行,回避了機械減速多級減速的效率耗損,綜合節電率25 %~60 %。
3)轉矩特性優良,中低速時轉矩性能尤佳,啟動轉矩大,啟動電流小。
4)無級調速,調速范圍寬,過載能力強。
5)軟啟動軟制動。制動特性好,無需一般電機機械制動或電磁制動的裝置。
6)體積小,質量輕,輸出轉矩大。
7)耐震動顛簸,噪音低,振動小,運轉平穩,壽命長。
8)無火花換向,電磁干擾小,適合有爆炸性氣體和粉塵的場所。
9)穩定性好,可靠性高,適應性強,維修與保養簡單。
10)根據需要可選擇梯形波磁場電機和正弦波磁場的電機。
定子繞組在定子鐵心圓周上的分布和繞組不同的連接方式,造就兩種不同的無刷電機。正弦電機具有正弦形式的反電動勢,正弦波控制的無刷直流無刷電機,轉矩脈動小,運行更平穩、噪聲更小、開關損耗最小、效率更高。但正弦電機繞組額外的互聯,增加了用銅量,增加了成本。
其缺點如下:稀土永磁體材料及加工成本較高,控制器成本亦相對價格較高昂;稀土永磁體的環境使用溫度受居里點限制,要求無刷電機有良好的通風散熱機制;少數機型在低速啟動時有輕微振動,但隨速度上升換相頻率增大,振動即消除。也許是電機自身機械固有頻率與電機電磁場頻率成倍數關系時的共振現象,需通過改變電機結構設計來改進。
5 應用
無刷直流電機在汽車上的主要應用可分成3類:持續負載,需要一定轉速,而對轉速精度要求不高的領域。如風扇、排氣扇和機油泵等。成本低,且為開環控制。可變負載,轉速某一范圍內變化,對電機轉速特性和動態響應時間特性有較高的需求。如燃油泵、電控制器、發動機控制等。這類應用系統成本相對較高。定位應用,對轉速的動態響應和轉矩有更高的要求。與一般自動控制系統和工業控制一樣,配合光電或同步設施來測速,進行過程控制。如蘭博基尼有一款跑車的前照燈自適應照明,就是采用的無刷直流電機。
根據不同的應用場合,48 V以下額定電壓的無刷電機用作汽車、機器人、小型機械臂和牽引、驅動運動裝置;100 V以上額定電壓的無刷電機適用于家用電器、自動化和工業應用。
例如電動燃油泵用的無刷電機。電動燃油泵是汽車電控燃油噴射系統的核心組成部分,其功能是將油箱內的燃油吸出并輸送給燃油系統,傳統的驅動裝置都采用有刷直流電機。機械換向帶來維修困難、EMC性能差、壽命短、換向火花的安全隱患和換向噪聲等弊端。無刷直流電機是理想的替代者。汽車燃油泵的功率為10~20 W。
6 結語
無刷電機不僅需要高磁能積的稀土永磁材料,還與電子科技、微電子技術、數字技術、自動控制技術以及材料科學等發展緊密聯系,要求我們熟悉交流直流、電動發電能量轉換、數字與模擬以及信號傳感器等領域。無刷直流電機以及高集成度的電機控制方案必成未來趨勢。在中國,因為電動自行車的普及和核心動力永磁無刷直流電機大量生產,極大推動中國在這一領域發展,筆者一直從事電機及其控制工作,也從事過該類電機的設計和工藝的實踐,轉入汽車行業已十余年,看到無刷電機已強勢進入汽車領域,遂成此文與同道交流。
[1]Tom Dento.Automobile Electronic & Electronic Systems [M].Elsevies Butterworth Heinemann Co.Ltd., 2009.
[2]Ronald K.J.Automotive Electronic Handbook(Third Edition)[M].McGrow – Hill Corpanics Inc. 2008.
[3]譚建成.永磁無刷直流電機技術[M].北京:機械工業出版社,2011.
(編輯 心 翔)
Brief Discussion on Brushless DC Motor
CHEN Tian-yin
(Apeks Motors (Hangzhou) Co., Ltd., Hangzhou 310013, China)
This article introduces structure, working principle, main merits and application of brushless DC motor and its recent development; its current application in fuel pump, electronic steering, engine control and vehicle control, as well as achievable parameters and indexes.
BLDC motor; working voltage; working life; reliability
U464.17
B
1003-8639(2017)06-0068-007
2016-07-29
陳天殷,男,教授級高級工程師,研究方向為汽車電機電器及電子。
