LCL型并網(wǎng)逆變器的滑模變結(jié)構(gòu)控制策略
2017-07-12 17:14:02高魯峰
四川電力技術(shù) 2017年3期
李 鵬,王 奔 ,高魯峰,李 曉,張 銳
(西南交通大學(xué)電氣工程學(xué)院,四川 成都 610031)
LCL型并網(wǎng)逆變器的滑模變結(jié)構(gòu)控制策略
李 鵬,王 奔 ,高魯峰,李 曉,張 銳
(西南交通大學(xué)電氣工程學(xué)院,四川 成都 610031)
針對(duì)三相并網(wǎng)分布式發(fā)電系統(tǒng)的運(yùn)行特點(diǎn)以及LCL濾波器的工作特性,建立三相并網(wǎng)逆變器的數(shù)學(xué)模型,它在同步旋轉(zhuǎn)dq坐標(biāo)系下的數(shù)學(xué)模型, 反映出LCL型并網(wǎng)逆變器是一個(gè)強(qiáng)耦合的、非線性的系統(tǒng)。為解決對(duì)這個(gè)強(qiáng)耦合、非線性系統(tǒng)直接設(shè)計(jì)控制器的困難,采用逆系統(tǒng)方法,將原系統(tǒng)線性化且解耦, 構(gòu)造出一個(gè)偽線性系統(tǒng);然后,運(yùn)用滑模變結(jié)構(gòu)控制,針對(duì)構(gòu)造出的這個(gè)偽線性系統(tǒng),設(shè)計(jì)該系統(tǒng)的控制策略以實(shí)現(xiàn)對(duì)LCL型并網(wǎng)逆變器綜合控制;最后在Matlab/Simulink 仿真軟件中通過(guò)建立仿真試驗(yàn)?zāi)P瓦M(jìn)行仿真,仿真的結(jié)果驗(yàn)證了所提出的這種控制策略的有效性和較強(qiáng)的魯棒性。
LCL型濾波器;逆系統(tǒng);變結(jié)構(gòu)控制;魯棒性
0 引 言
近年來(lái)由可再生能源構(gòu)成的分布式發(fā)電系統(tǒng)蓬勃發(fā)展,它們都需要采用并網(wǎng)逆變器與電網(wǎng)相連接[1-2]。由于并網(wǎng)逆變器通常采用PWM調(diào)制,從而導(dǎo)致分布式電源輸出電流中含有大量高次諧波,影響輸出的電能質(zhì)量,因此必須采取合適的濾波電路。小功率分布式電源通常采用L型濾波器作為并網(wǎng)接口,而大功率分布式電源則采用LCL濾波器。LCL濾波器與L型濾波器相比可以濾除高次諧波,并且成本低,體積小。但是LCL濾波器是一個(gè)三階諧振電路,其諧振對(duì)系統(tǒng)的穩(wěn)定性及并網(wǎng)輸出電流波形質(zhì)量有很大的影響,控制器的設(shè)計(jì)是決定系統(tǒng)穩(wěn)定運(yùn)行以及并網(wǎng)電流質(zhì)量所必需解決的問(wèn)題[3-5]。
目前,針對(duì)LCL型并網(wǎng)逆變器的控制方法有很多文獻(xiàn)進(jìn)行了分析。文獻(xiàn) [8]采用基于靜止坐標(biāo)變換的比例諧振控制器(PR),PR控制算法可以實(shí)現(xiàn)無(wú)靜差跟蹤控制,同時(shí)PR控制算法可以方便地實(shí)現(xiàn)諧波補(bǔ)償,但同時(shí)它增大了系統(tǒng)階數(shù),增加了控制器的設(shè)計(jì)難度。文獻(xiàn)[9]針對(duì)LCL型并網(wǎng)逆變器采用滯環(huán)控制,簡(jiǎn)單實(shí)用、穩(wěn)定可靠、動(dòng)態(tài)響應(yīng)快、不依賴(lài)負(fù)載參數(shù)和無(wú)條件穩(wěn)定,但其開(kāi)關(guān)頻率、損耗及控制精度受滯環(huán)寬度影響波動(dòng)范圍較大,導(dǎo)致濾波器設(shè)計(jì)困難,影響控制器的性能。文獻(xiàn)[10]采用基于前饋補(bǔ)償?shù)慕怦羁刂疲行送叫D(zhuǎn)坐標(biāo)下LCL型并網(wǎng)逆變器數(shù)學(xué)模型d、q兩軸之間存在復(fù)雜的耦合項(xiàng),算法簡(jiǎn)單、技術(shù)成熟,但前饋解耦PI控制對(duì)并網(wǎng)電流難以達(dá)到理想的控制效果,存在穩(wěn)態(tài)誤差的問(wèn)題。
針對(duì)LCL型并網(wǎng)逆變器的強(qiáng)耦合、非線性,采用逆系統(tǒng)控制方法,構(gòu)造出原系統(tǒng)的逆系統(tǒng),然后將構(gòu)造出來(lái)的逆系統(tǒng)與原系統(tǒng)串聯(lián),將原系統(tǒng)線性化和解耦后,構(gòu)成一個(gè)偽線性系統(tǒng)。 然后,針對(duì)這個(gè)偽線性系統(tǒng)設(shè)計(jì)滑模變結(jié)構(gòu)控制器,設(shè)計(jì)方法變得簡(jiǎn)單易行。所采用的控制策略與基于前饋解耦PI控制方法相比,在設(shè)計(jì)控制器時(shí), 控制器參數(shù)整定與PI控制器參數(shù)整定相比要簡(jiǎn)單。最后, 建立仿真模型進(jìn)行仿真驗(yàn)證,仿真的結(jié)果證實(shí)了所提出的控制策略的正確性和有效性。
1 LCL型并網(wǎng)逆變器模型
圖1為基于LCL濾波器的三相并網(wǎng)逆變器控制原理圖。其中,直流母線電壓Vdc由可再生能源提供,逆變后經(jīng)LCL濾波器接至電網(wǎng),通過(guò)調(diào)節(jié)逆變器輸出電流實(shí)現(xiàn)并網(wǎng)供電。圖中,L1為逆變器側(cè)濾波電感;L2為電網(wǎng)側(cè)電感;C為濾波電容;u、i分別為逆變器出口側(cè)輸出電壓、電流;uc、ic分別為濾波電容電壓和電流;ug為電網(wǎng)電壓。由于電網(wǎng)容量較大,電網(wǎng)電壓基本不變,因此并網(wǎng)逆變器輸出的電能質(zhì)量主要由并網(wǎng)電流ig決定。
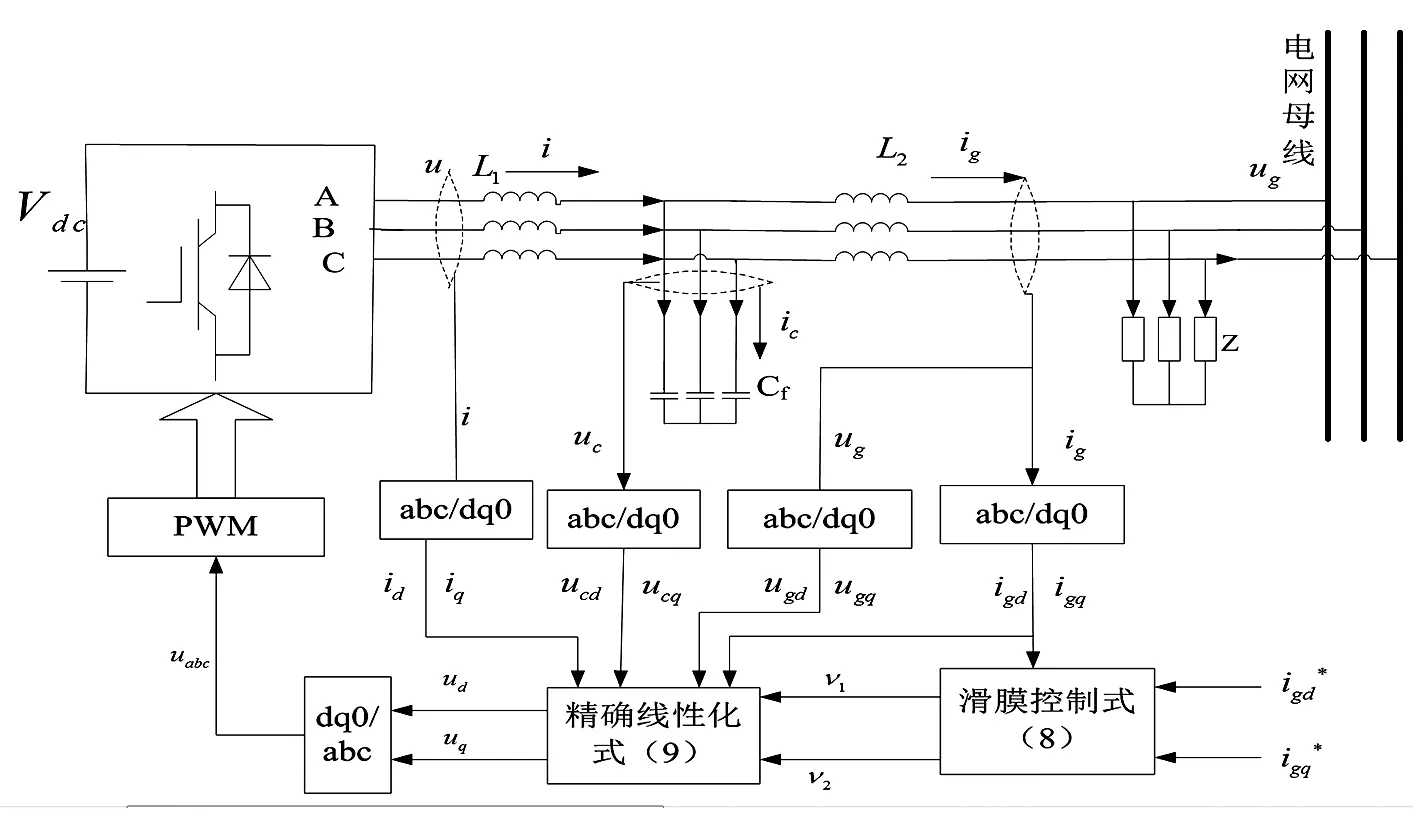
圖1 滑模變結(jié)構(gòu)控制圖
三相LCL并網(wǎng)逆變器瞬時(shí)動(dòng)態(tài)方程為
(1)
對(duì)式(1)作經(jīng)典派克變換, 得到其在dq坐標(biāo)下的數(shù)學(xué)模型為
(2)
在式(2)中:id、iq為逆變器出口側(cè)輸出電流的d、q軸分量;ud、uq為逆變器出口側(cè)輸出電壓的d、q軸分量;ucd、ucq為濾波電容電壓的d、q軸分量;igd、igq為逆變器并網(wǎng)電流的d、q軸分量。考慮到LCL并網(wǎng)逆變器為三相對(duì)稱(chēng)系統(tǒng),那么各三相變量經(jīng)派克變換后,其0軸分量均為0。根據(jù)式(2)所示的并網(wǎng)逆變器模型,可建立如下的多輸入多輸出系統(tǒng):
(3)
其中,系統(tǒng)的狀態(tài)變量為x=[x1x2x3x4x5x6]T=[idiqucducqigdigq]T;輸入變量為u=[u1u2]T=[uduq]T;輸出變量為y=[y1y2]T=[igdigq]T。
由式(3)可以看出, 系統(tǒng)是一個(gè)多輸入多輸出的、強(qiáng)耦合的、非線性的系統(tǒng)。
2 LCL并網(wǎng)逆變器的控制策略
2.1 求取逆系統(tǒng)
逆系統(tǒng)方法[12],是利用被控對(duì)象的逆系統(tǒng)將被控制對(duì)象補(bǔ)償成具有線性傳遞關(guān)系的系統(tǒng),即偽線性系統(tǒng)。然后,可靈活地運(yùn)用各種控制理論來(lái)設(shè)計(jì)偽線性系統(tǒng)的控制器,構(gòu)造兩個(gè)獨(dú)立的偽線性系統(tǒng)。對(duì)y1、y2求導(dǎo),直到它們第1次含輸入變量為止,結(jié)果如下:
(4)


由逆系統(tǒng)相對(duì)階定義可知,系統(tǒng)的相對(duì)階為α=[α1α2]=[3 3],α1+α2=6=n,n為系統(tǒng)階數(shù),故基于LCL濾波器的并網(wǎng)逆變器系統(tǒng)是完全可逆的。原系統(tǒng)線被性化解耦后, 所構(gòu)成的偽線性系統(tǒng)可以解耦成2個(gè)子線性系統(tǒng)如下:
(5)
(6)
2.2 設(shè)計(jì)變結(jié)構(gòu)控制器
變結(jié)構(gòu)控制具有較強(qiáng)魯棒性,它既可以用于設(shè)計(jì)線性系統(tǒng),也可以用來(lái)設(shè)計(jì)非線性系統(tǒng)[13]。 但如果直接使用變結(jié)構(gòu)控制設(shè)計(jì)非線性強(qiáng)耦合系統(tǒng), 控制器設(shè)計(jì)會(huì)比較復(fù)雜,而采用逆系統(tǒng)方法將原系統(tǒng)線性化和解耦后,再采用變結(jié)構(gòu)控制來(lái)分別設(shè)計(jì)各子系統(tǒng)則變得簡(jiǎn)單。因此,這里采用逆系統(tǒng)方法將系統(tǒng)線性化和解耦后,再運(yùn)用變結(jié)構(gòu)控制來(lái)設(shè)計(jì)控制器。
控制器設(shè)計(jì)目標(biāo):
e1=igd-igdref→0,e2=igq-igqref→0
根據(jù)變結(jié)構(gòu)控制理論[13],取切換面
(7)
用指數(shù)趨近律設(shè)計(jì)方法, 令
(8)
聯(lián)合式(5)、式(6)、式(7)、式(8)可得兩個(gè)偽線性系統(tǒng)的控制律為
(9)
將式(9)帶入式(4)中,可得控制輸入為
(10)
在式(9)、式(10)中:sgn()為符號(hào)函數(shù);c11、c12、c21、c22、k1、k2、ε1、ε2為變結(jié)構(gòu)控制器參數(shù),均為正數(shù)。在保證系統(tǒng)不會(huì)發(fā)生振蕩的條件下,適當(dāng)?shù)卦龃髤?shù)c11、c12、c21、c22、k1、k2較快的跟蹤速度,而相應(yīng)地減小參數(shù)ε1、ε2可以使系統(tǒng)減小抖動(dòng)。
3 仿真分析
為驗(yàn)證所采用控制策略的可行性和有效性,在Matlab /Simulink中建立了如圖1所示的模型,進(jìn)行仿真驗(yàn)證,系統(tǒng)參數(shù)如表1所示。
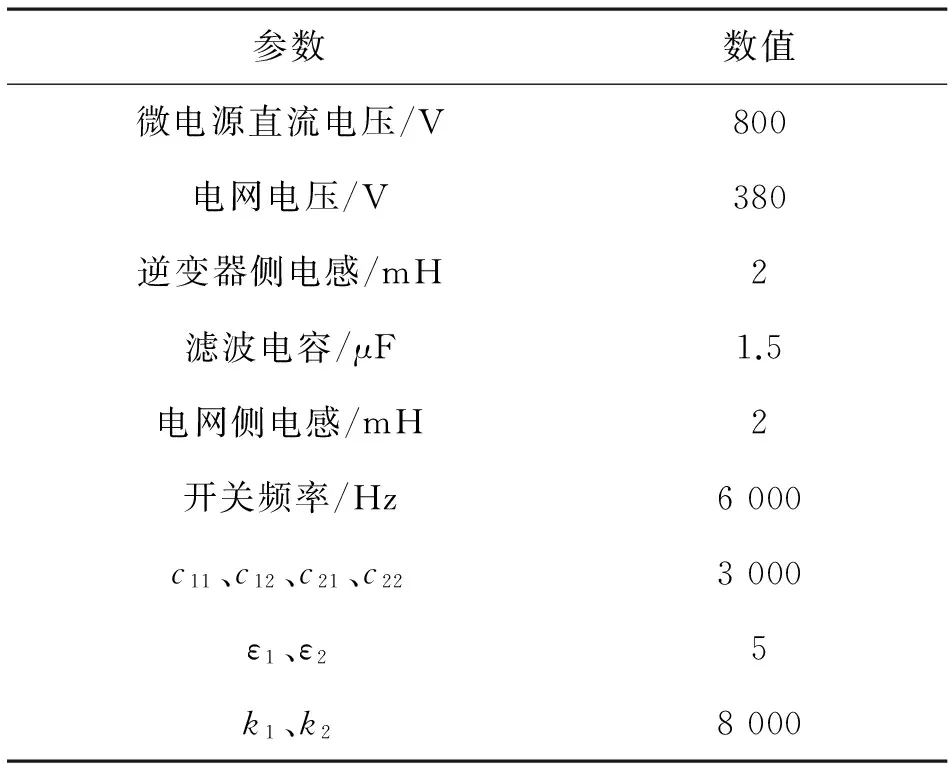
表1 系統(tǒng)參數(shù)
圖2至圖4給出了采用滑模變結(jié)構(gòu)控制的動(dòng)態(tài)響應(yīng)曲線,圖5至圖7給出了采用傳統(tǒng)前饋解耦PI控制方法下相應(yīng)的動(dòng)態(tài)曲線。
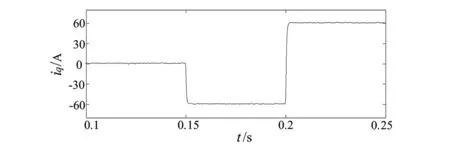
圖2 滑模控制下無(wú)功電流波形
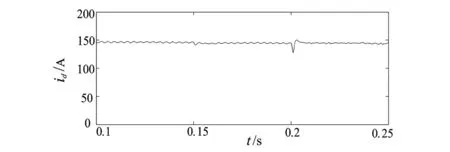
圖3 滑模控制下有功電流波形
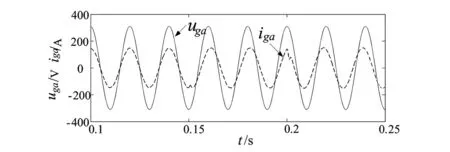
圖4 滑模控制下a相電壓和電流波形
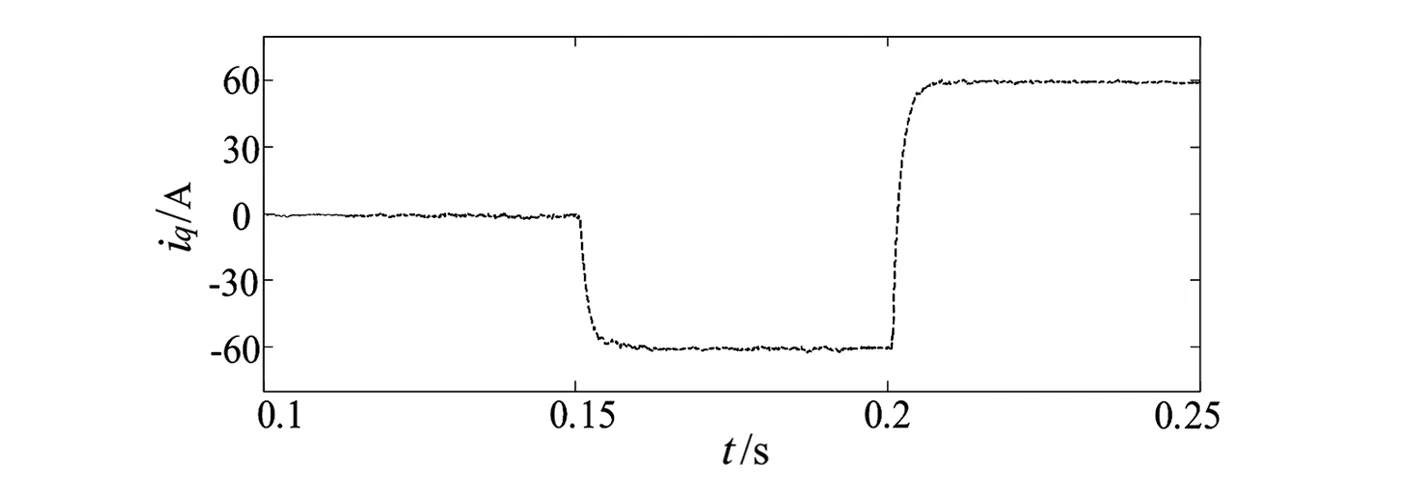
圖5 PI控制下無(wú)功電流波形
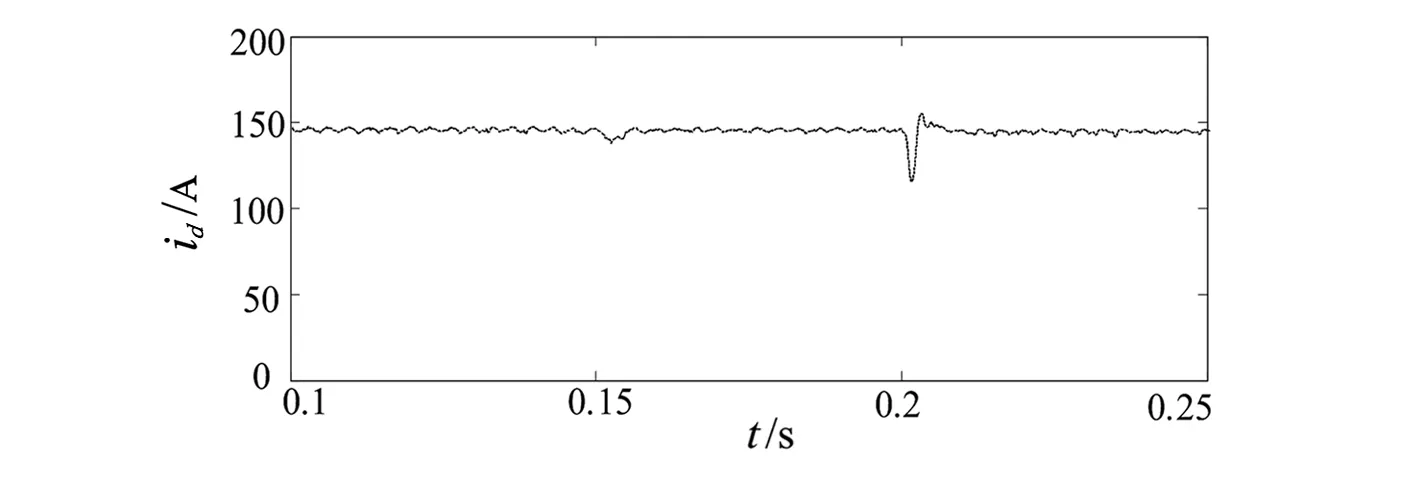
圖6 PI控制下有功電流波形
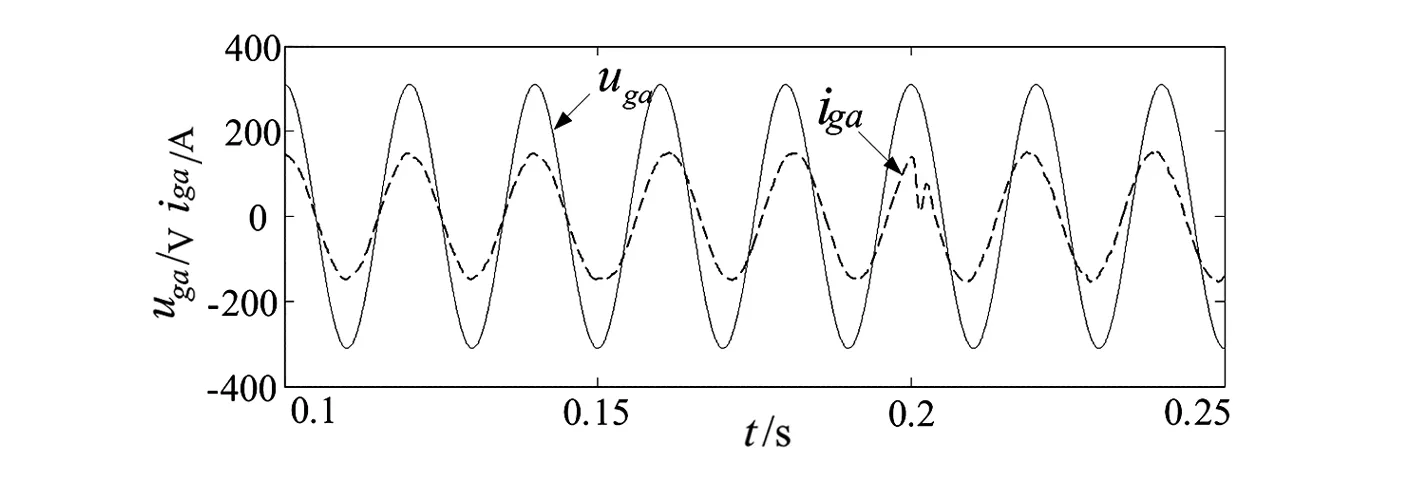
圖7 PI控制下a相電壓和電流波形
在0.15 s時(shí),無(wú)功電流的指令值由0變?yōu)?60 A,在0.2 s時(shí),又變?yōu)?0 A。圖2和圖3分別為無(wú)功電流iq、有功電流id的仿真情況,分別與圖5和圖6對(duì)比,從圖中可以看出,當(dāng)電流給定值變化,采用滑模變結(jié)構(gòu)控制時(shí),并網(wǎng)電流響應(yīng)曲線能夠快速跟蹤指令值的變化,超調(diào)量小,穩(wěn)態(tài)無(wú)誤差。圖4是滑模變結(jié)構(gòu)控制型a相電壓和電流圖,與圖7比較可知,采用滑模變結(jié)構(gòu)控制時(shí),在并網(wǎng)電流突變時(shí)刻,a相電流更平滑,顯示出很強(qiáng)的魯棒性,能夠有效減少并網(wǎng)電流的畸變率,提高入網(wǎng)電流質(zhì)量。
4 結(jié) 語(yǔ)
前面闡述了LCL型并網(wǎng)逆變器的數(shù)學(xué)模型,并基于此數(shù)學(xué)模型,運(yùn)用逆系統(tǒng)方法,將系統(tǒng)線性化和解耦后,分解成2個(gè)子線性系統(tǒng);再采用滑模變結(jié)構(gòu)控制,設(shè)計(jì)出各子系統(tǒng)控制器,來(lái)綜合控制。這種控制方法與典型PI控制策略相比,其控制器參數(shù)更易于整定,無(wú)需附加阻尼電阻以保證系統(tǒng)穩(wěn)定運(yùn)行,而且仿真結(jié)果表明,變結(jié)構(gòu)控制具有較快的響應(yīng)速度,而且超調(diào)量小,具有更好的調(diào)節(jié)性能。算例證明了該控制策略的有效性。
[1] 許津銘,謝少軍,張斌鋒.分布式發(fā)電系統(tǒng)中LCL濾波并網(wǎng)逆變器電流控制研究綜述[J].中國(guó)電機(jī)工程學(xué)報(bào),2015,35(16):4153-4166.
[2] 孫蔚,伍小杰,戴鵬,等.基于LCL濾波器的電壓源型PWM整流器控制策略綜述[J].電工技術(shù)學(xué)報(bào),2008,23(1):90-96.
[3] Guoqiao S. An Improved Control Strategy for Grid-Connected Voltage Source Inverters with a LCL Filter[J].IEEE Transactions on Power Electronics, 2008, 23(4):7.
[4] Liu F.Design and Research on Parameter of LCL Filter in Three-phase Grid-connected Inverter[C].Power Electronics and Motion Control Conference,2009:2174-2177.
[5] 王要強(qiáng),吳鳳江,孫力,等.帶LCL輸出濾波器的并網(wǎng)逆變器控制策略研究[J].中國(guó)電機(jī)工程學(xué)報(bào),2011,31(12):34-39.
[6] 郭小強(qiáng),鄔偉揚(yáng),顧和榮等.并網(wǎng)逆變器LCL接口直接輸出電流控制建模及穩(wěn)定性分析[J].電工技術(shù)學(xué)報(bào),2010,25(3):102-109.
[7] Shen G. A New Current Feedback PR Control Strategy for Grid-connected VSI with an LCL Filter[C]. Applied Power Electronics Conference and Exposition,2009:1564-1569.
[8] Halimi,b. P A, Dahono.A Current Control Method for Phase-controlled Rectifier That Has An LCL Filter[C].2001 4th IEEE International Conference on Power Electronics and Drive Systems,2001:20-25.
[9] 戴訓(xùn)江,晁勤.基于LCL濾波的光伏并網(wǎng)逆變器電流滯環(huán)控制[J].電力電子技術(shù),2009,43(71):33-35.
[10] 屈克慶,葉天凱,趙晉斌,等. 基于前饋補(bǔ)償?shù)腖CL型并網(wǎng)逆變器解耦控制策略研究[J].電氣傳動(dòng),2015,45(11):26-30.
[11] 鮑陳磊,阮新波,王學(xué)華,等.基于PI調(diào)節(jié)器和電容電流反饋有源阻尼的LCL 型并網(wǎng)逆變器閉環(huán)參數(shù)設(shè)計(jì)[J].中國(guó)電機(jī)工程學(xué)報(bào),2012,32(25):133-142.
[12] 戴先中.多變量非線性系統(tǒng)的神經(jīng)網(wǎng)絡(luò)逆系統(tǒng)控制方法[M].北京:科學(xué)出版社,2005.
[13] 高為炳.變結(jié)構(gòu)控制的理論及設(shè)計(jì)方法[M].北京:科學(xué)出版社,1996.
According to the operating characteristics of three-phase grid-connected distributed generation system and the work characteristics of LCL filter, the mathematical model of three-phase grid-connected inverter is established. Its mathematical model in a synchronous rotatingdqcoordinate system reflects that it is a strong coupling nonlinear system. To avoid the difficulties in designing the controllers for the system, an inverse-system control is proposed. Firstly, using the inverse-system method, the original system is linearized and decoupled into a pseudo-linear system. Secondly, employing the variable-structure control (VSC) theory, the variable-structure controllers of the pseudo-linear system is designed for controlling the system of grid-connected inverter with LCL filter. Finally, the feasibility and effectiveness of the proposed control strategy are verified by the simulations on Matlab/Simulink.
LCL filter; inverse-system; variable-structure control; robustness
TM85
A
1003-6954(2017)03-0056-05
李 鵬(1992),碩士研究生,研究方向?yàn)槲㈦娋W(wǎng)與新能源發(fā)電技術(shù)、滑模變結(jié)構(gòu)控制;
2017-01-27)
王 奔(1960),教授、博士,研究方向?yàn)檠芯糠较驗(yàn)殡娏ο到y(tǒng)非線性和變結(jié)構(gòu)控制。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01